Определение пространственной ориентации объекта, маркированного QR кодом
Санкт-Петербургский
ГосУдарственный политехнический университет
ИНСТИТУТ
МЕТАЛУРГИИ, МАШИНОСТРОЕНИЯ И ТРАНСПОРТА
ОТДЕЛЕНИЕ
ТЕХНОЛОГИЙ МАШИНОСТРОЕНИЯ
Кафедра
«Мехатроника и роботостроение» (при ЦНИИ РТК)
ВЫПУСКНАЯ
РАБОТА БАКАЛАВРА
Тема:
Определение пространственной ориентации объекта, маркированного QR кодом
Направление:
220200.62.01 «Автоматизация и управление»
Санкт-Петербург,
2013
Реферат
КОД, КАМЕРА, ОБНАРУЖЕНИЕ И РАСПОЗНАВАНИЕ МЕТКИ,
ПРОСТРАНСТВЕННАЯ ОРИЕНТАЦИЯ QR КОДА, РАЗРАБОТКА АЛГОРИТМОВ
Целью этой работы является разработка приложения
для обнаружения, расшифровки и определения положения QR кода в пространстве.
С помощью библиотеки OpenCV реализовано
обнаружение и обработка QR кода. На основе спецификации ISO/IEC 18004
Information technology - Automatic identification and data capture techniques -
Bar code symbology - QR Code (Информационная технология - Автоматическая
идентификация и сбор данных - Символика штрихового кода - QR Код) изучен и
программно реализован алгоритм расшифровки QR кода. Разработан алгоритм
определения положения QR кода в системе координат, связанной с камерой.
Данное приложение может быть использования для
нахождения определенного объекта среди объектов, на которых нанесен QR код и
позиционирования манипулятора с использованием данных об ориентации плоскости
QR кода.
Содержание
Введение
.
Алгоритмы распознавания графического маркера
.1
Алгоритм обнаружения QR кода
.2
Алгоритм расшифровки QR кода
.
Методы 3D реконструкции
.1
Метод триангуляции
.2
Стереозрение
.3
Определение ориентации плоскости QR кода относительно камеры
.
Программное обеспечение для распознавания QR кода и определения его ориентации
.1
Описание программы
.2
Тестирование программы
.
Применение разработанного программного обеспечения
Заключение
Список
использованных источников
Перечень условных обозначений,
терминов и сокращений
|
3D
|
-
|
трехмерное
пространство или изображение
|
|
2D
|
-
|
двумерное
изображение
|
|
ПЗС
|
-
|
прибор
зарядовой связи
|
|
QR
|
|
quick
response (быстрый отклик)
|
Введение
код плоскость программный
обеспечение
В настоящее время для маркировки различной
продукции всё чаще используется QR код. Данную особенность можно использовать
для создания автоматических систем обнаружения, захвата и транспортировки этой
продукции на основе обработки информации, зашифрованной в QR коде и информации
об ориентации кода в пространстве.
Для возможности работы подобной системы
необходимо, чтобы графический маркер находился в строго определенном месте на
объектах, с которыми будут производиться манипуляции. С помощью видеокамеры
будет детектироваться QR код и информация, полученная в ходе его обработки,
будет использования для позиционирования устройств захвата объекта для его
последующей транспортировки.
Эти коды представляют собой миниатюрные носители
данных, которые хранят текстовую информацию объемом в половину страницы А4
формата. При помощи белых и черных квадратов эти данные кодируются. Тогда как
расшифровка осуществляется посредством специальных сканирующих устройств. То
есть используется тот же принцип, что и в компьютерной технике. Их объединяет
следующее правило: определенному сочетанию квадратов соответствует конкретное
значение (к примеру, число или буква).
Отметим, что QR-коды могут быть выполнены с
использованием бинарных сочетаний цветов, отличных от сочетания «черный-белый».
Главное, чтобы между темными и светлыми участками был четко выраженный
контраст.
Основное достоинство QR-кода - это лёгкое
распознавание сканирующим оборудованием (в том числе и фотокамерой мобильного
телефона), что дает возможность использования в торговле, производстве,
логистике. QR-коды больше всего распространены в Японии, стране, где штрих-коды
пользовались такой большой популярностью, что объём информации, зашифрованной в
коде, вскоре перестал устраивать индустрию.
В отличие от штрих-кода, который сканируют
тонким лучом, QR-код определяется сенсором как двумерное изображение. Три
квадрата в углах изображения позволяют нормализовать размер изображения и его
ориентацию, а также угол, под которым сенсор относится к поверхности
изображения. Точки переводятся в двоичные числа с проверкой по контрольной
сумме.
Строгая регламентация соотношения размеров и
положения ключевых признаков позволяет использовать распознаваемый QR-код в
качестве эталонного маркера для определения ориентации объекта, на котором в
заранее оговорённом месте нанесён код. Разработка системы распознавания,
использующей отмеченные свойства QR-кода, позволит создать эффективное средство
для создания систем автоматизированной сортировки. Решению задачи определения
ориентации объекта маркированного QR-кодом посвящена настоящая работа.
В первом разделе описаны разработанные алгоритмы
обнаружения и расшифровки QR кода.
Во втором разделе приведен обзор методов
нахождения координат объекта и описан разработанный алгоритм определения
ориентации объекта по графическому маркеру.
В третьем разделе приведено описание
разработанного программного обеспечения и показаны результаты его тестирования,
а в четвертом рассказывается о возможности применения данного программного обеспечения
для построения автоматизированных систем.
1. Алгоритмы распознавания
графического маркера
.1 Алгоритм обнаружения QR кода
код - это графический маркер квадратной формы,
представляющий собой набор черных и белых квадратов (рисунок 1). В трех углах
данного маркера находятся мишени, по которым его можно обнаружить посредством
камеры, используя специальное программное обеспечение, реализующее методы
компьютерного зрения.
Рисунок 1 - Изначальное изображение
Ниже приведен алгоритм обнаружения QR кода,
реализованный с помощью библиотек VideoInput и OpenCV. Идея данного алгоритма
описывается в [1]. Данный алгоритм был нами модифицирован и дополнен деталями
необходимыми для его практического использования.
В качестве технического средства была
использована веб-камера Ritmix RVC-006M с матрицей 0,3 мегапикс, разрешением
видео 640*480, подключенная через USB 2.0. А в качестве среды разработки была
выбрана среда Visual Studio 2010, а в качестве языка программирования - C++ .
такой выбор обусловлен тем, что на этом языке написана мощная профессиональная
библиотека для реализации задач компьютерного зрения OpenCV. Также для
осуществления захвата видео была использована библиотека videoInput.-
Библиотека компьютерного зрения с открытым исходным кодом(Open Source Computer
Vision Library), содержащая более 500 функций. До первой версии разработкой
занималась русская команда Intel в Нижнем Новгороде. Библиотека содержит
алгоритмы для обработки, реконструкции и очистки изображений, распознания
образов, захвата видео, слежения за объектами, калибровки камер и др. [2].
Изначально перед OpenCV ставились следующие цели
исследования машинного зрения, разработки и оптимизации кода. Распространение
информации по машинному зрению, разработка общей инфраструктуры на которой
могли бы основываться разработчики, код должен быть удобочитаем и передаваем.
Приложения должны быть переносимыми,
оптимизированными, код которых не обязательно должен быть открытым. Приложения
также могут создаваться в коммерческих целях. OpenCV
поддерживает компиляторы Visual
C++, Borland
C++, Intel
Compiler, MinGW,
GCC, Intel
Compiler, Carbon.
В начале мы подключаемся к web камере с помощью библиотеки VideoInput и делаем
снимок QR кода и далее начинаем обработку снимка (рисунок 5). Преобразуем
полученное изображение в градации серого, делаем изображение двоичным с помощью
порогового преобразования. Всем пикселям, значение которых меньше порога,
присваиваем значение 255 - белый цвет, всем пикселям, значение которых выше
порога присваиваем 0 - черный цвет. Для получения корректного результата нужно,
чтобы снимок был достаточно контрастным. Таким образом, мы получаем черно-белое
изображение.
Далее находим все контуры, которые присутствуют
на черно-белой картинке. Теперь среди найденных контуров нам необходимо найти 3
мишени. Мишень - область QR кода образованная тремя вложенными квадратами с
отношением сторон 7:5:3 (рисунок 2).
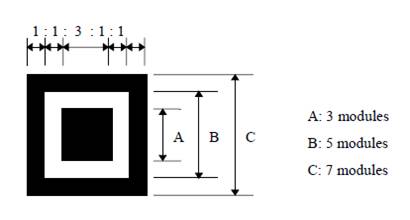
Рисунок 2 - Мишень QR кода
Считаем мишенью квадрат, имеющий внутри себя два
вложенных квадрата (рисунок 3).
Рисунок 3 - Изображение с найденными мишенями
Для того чтобы найти мишени, нужно сначала
отыскать среди контуров все квадраты, и потом для каждого квадрата проверить:
есть ли в нем 2 вложенных квадрата.
В цикле обходим все контуры и ищем квадраты.
Чтобы определить, что контур является квадратом, используем два критерия
поиска: 1) мы найдем размеры минимального прямоугольника, охватывающего текущий
контур и, перемножив размеры, получим площадь этого прямоугольника. Напрямую с
помощью специальной функции OpenCV найдем площадь контура. Если площади контура
и прямоугольника, ограничивающего контур, примерно совпадают, то можно считать
этот контур прямоугольником;
) сравниваем высоту и ширину прямоугольника,
ограничивающего контур. Если они примерно равны, то считаем это прямоугольник
квадратом.
Определяем точки-вершины каждой мишени. Мы имеем
все вершины QR кода кроме правой нижней. Для того, чтобы ее определить проведем
прямые линии через правую сторону правой верхней мишени и нижнюю сторону левой
нижней мишени. Точка пересечения данных прямых (точка А на рисунке 4) будет
искомой нижней правой вершиной QR кода.

Рисунок 4 - Нахождение правой нижней вершины QR кода
Зная все четыре вершины QR кода, делим каждую
его сторону на количество ячеек (маленьких квадратов) в строке/столбце и,
используя полученную информацию, строим сетку, набор вертикальных и
горизонтальных линий, разделяющих QR код на ячейки. Определяем цвет каждой
ячейки и создаем массив ячеек, заполненный нулями и единицами, где единица
соответствует черной ячейке, а нуль - белой.
.2 Алгоритм расшифровки QR кода
Полученный методами компьютерного зрения массив
нулей и единиц будет расшифрован с помощью алгоритма, описанного в спецификации
ISO/IEC 18004 Информационная технология - Автоматическая идентификация и сбор
данных - Символика штрихового кода - QR Код [3]. Опишем данный алгоритм:
) получение массива "0" и
"1" бит;
) считывание информации о формате QR кода.
Извлечение информации о маске (рисунок 5);
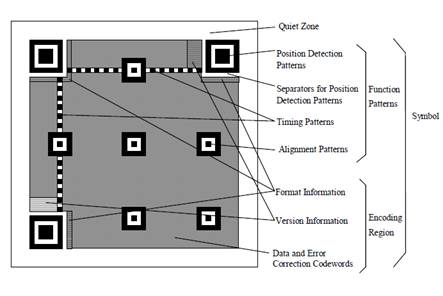
Рисунок 5 - Состав QR кода
) считывание информации о версии (где
применимо), а затем определение версии кода; 4) применение к каждой ячейки
массива маски посредством исключающего или. Всего существует 8 видов масок,
значения бит которых определяются по формулам (1) - (8);
(i + j) mod 2 = 0, (1)
(i)mod 2 = 0, (2)
(j)mod 3 = 0, (3)
(i + j) mod 3 = 0, (4)
((i div 2) + (j div 3)) mod 2 = 0,
(5)
(i j) mod 2 + (i j) mod 3 = 0, (6)
((i j) mod 2 + (i j) mod 3) mod 2 =
0, (7)
((i j) mod 3 + (i+j) mod 2) mod 2 =
0, (8)
где i и j - номера ячеек.
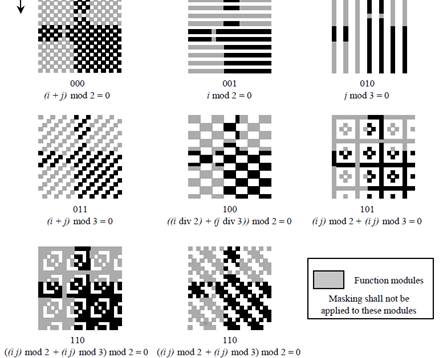
Рисунок 6 - Виды масок
Применяем маску к полученному нами массиву
посредством операции XOR (рисунок 7);

Рисунок 7 - Применение маски
5) определение режима кодирования и считывание
кода в соответствии с правилами размещения и восстановление данных и кодовых
слов в сообщении.
Узнаем индикатор режима по четырем битам в
правом нижнем углу и соответствующий ему режим по таблице 1.
В данной работе мы реализуем два режима:
числовой и 8-битный. Цифровой режим кодирует данные из десятичного набора цифр
(0 - 9) (ASCII значения 30HEX к 39HEX) при нормальной плотности 3 символа
данных на 10 бит. В 8-битный режиме кодируется 8-битный Latin/Kana набор
символов в соответствии с JIS X 0201 (символьные значения 00hex к FFhex). В
этом режиме плотность данных составляет 8 бит / символ;
) обнаружение ошибок с помощью коррекции ошибок
кодовых слов. Если любая ошибка обнаружена, то исправить ее;
Таблица 1 - Режимы кодирования
|
Режим
|
индикатор
|
|
ECI
|
0111
|
|
Числовой
|
0001
|
|
Буквенно-цифровой
|
0010
|
|
8-битный
|
0100
|
|
Kanji
|
1000
|
|
Structured
Append
|
0011
|
|
FNC1
|
0101
|
|
Разделитель
|
0000
|
) разделение кодовых слов данных на сегменты в
зависимости от режима и показателями количество символов (рисунок 8).
Считывание происходит змейкой, начиная с правой
нижней ячейки (рисунок 9). Старший значащий бит (бит 7) каждого кодового блока
находится в первом доступном положении модуля;
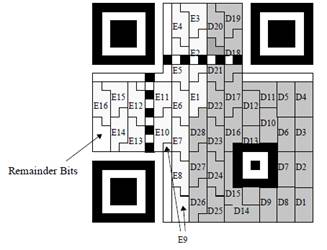
Рисунок 8 - Сегменты с данными
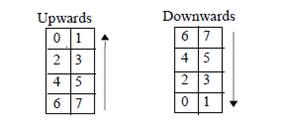
Рисунок 9 - Считывание бит
) наконец, декодирование данных в соответствии с
режимом.
2. Методы 3D реконструкции
.1 Метод триангуляции
Триангуляция - это способ измерения расстояний и
определения положения объектов, часто с использованием лазера. Он использует
способность лазерного луча распространяться в хорошо коллимированной форме
(т.е. с малой расходимостью) на большие расстояния. Обычно лазерный луч
освещает точку, расстояние до которой от лазерного устройства необходимо
измерить; по существу, лазер используется в качестве указателя. Рассеянное или
зеркальное отражения от этой точки контролируются детектором, который
устанавливается на некотором расстоянии от лазерного луча, таком, что источник
лазерного излучения, объекта и детектор образуют треугольник. На детекторе
линза фокусирует отраженный свет на ПЗС-матрице, и положение яркого пятна на
чипе показывает направление входящего света, т. е. угол между лазерным лучом и
возвращенным светом, откуда расстояние и может быть рассчитано [4].
Высокая скорость обнаружения позволяет
отслеживать положение движущейся или вибрирующей части, например, какой-либо
машины. Полученная точность может, как правило, достигать одной тысячной доли
расстояния. Для рассеянного отражения расстояние может быть ограничено
требованием получить определённую отраженную оптическую мощность; при
зеркальном отражении могут быть измерены гораздо большие расстояния, но
требуется какое-либо угловое выравнивание в направлении измерения.
Принцип триангуляции также может быть реализован
с помощью лазерного луча, в направлении которого производится быстрое
сканирование в двух измерениях (рисунок 10). Таким образом, можно получить
трехмерные (3D) изображения.
В идеале, лазерный источник для триангуляции должен
иметь высокое качество пучка, чтобы осветить небольшое пятно на большом
расстоянии. Так же требуется определенная оптическая мощность, особенно для
целей с рассеянным отражением. Лучше использовать безопасные для глаз длины
волны лазерного излучения (например, в 1,5 мкм области), хотя видимый луч
помогает убедиться, что подсвечена правильная точка.
Триангуляционный метод измерения - это
перспективный и широко применяемый подход к решению важных измерительных задач
в разных областях науки. Этот метод в основном использовался в геодезии и
картографии, и только с недавних пор стал развиваться в направлении
линейно-угловых измерений и контроля точных деталей сложной формы. Связано
данное обстоятельство в первую очередь с тем, что электронные компоненты необходимые
для создания устройств на базе триангуляционного метода не соответствовали
требованиям, предъявляемым к ним, и были невыгодны для внедрения в производство
по соотношению цена-качество, но сейчас положение изменилось к лучшему. Метод
оптической триангуляции положен в основу современных измерительных устройств,
таких как триангуляционные щупы и датчики, лазерные 2D/3D профиломеры, лазерные
3D сканеры и другие.
 <#"722854.files/image011.jpg">
<#"722854.files/image011.jpg">
Рисунок 11 - Восстановление точки прообраза
Точку прообраза можно восстановить и с помощью
альтернативного, чисто алгебраического подхода: для данных проекционных матриц
М и М' и согласованных точек р и р' условия zp = MP и z'p' = MP можно
переписать следующим образом: p*MP = 0, p`*M`P = 0.
Эту переопределенную систему четырех независимых
линейных уравнений по координатам Р легко решить, использовав линейные схемы
наименьших квадратов. В отличие от предыдущего подхода этот метод
восстановления не имеет очевидной геометрической интерпретации, но легко обобщается
на случай трех или больше камер - каждое новое изображение всего лишь вводит
два дополнительных условия.
Можно восстановить точку прообраза, соотнесенную
с р и р', как точку Q с образами q и q' минимизировав величину d2(p,q) +
d2(p'',q'). В отличие от двух других методов, представленных в этом разделе,
данный подход не позволяет аналитически вычислить восстановленную точку.
2.3 Определение ориентации плоскости
QR кода относительно камеры
Математическая модель камеры
С точкой О (рисунок 12), в которой находится
камера, свяжем систему координат (X,Y,Z). Из этой точки опустим перпендикуляр
на картинную плоскость. Точка пересечения перпендикуляра и картинной плоскости
называется принципиальной точкой p. С этой точкой свяжем систему отсчета (x,y).
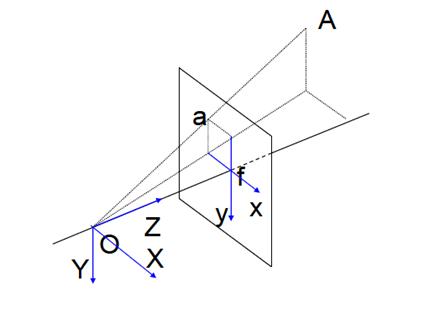
Рисунок 12 - Модель камеры
Системы координат (X,Y,Z) и (x,y) связаны
нелинейным преобразованием (формулы (9) и (10)).
 (9)
(9)
 (10)
(10)
Свяжем систему координат (u,v) с
левым верхним углом. Отсчет в этой системе происходит в пикселях (рисунок 13).
Принципиальная точка имеет координаты p=(0,0) в системе (x,y); координаты
(0,0,Z) в системе (X,Y,Z) и координаты (Cx,Cy) в системе (u,v).
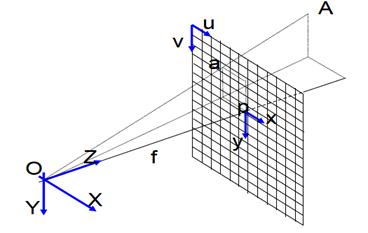
Рисунок 13 - Система координат (u,
v)
Системы координат (u,v) и (x,y)
связаны аффинными преобразованиями (формулы (11) и (12)).
 ,
,
где pix - длина пикселя.
Подставляя формулы (9) и (10) в
формулы (11) и (12), получаем выражения, связывающие системы (u,v) и (X,Y,Z).
 , (13)
, (13)
 , (14)
, (14)
где f = 3,85 мм;= 0,0232 мм;= 300
пикселей;= 255 пикселей.
Параметры Cx и Cy были определены в
ходе калибровки камеры с разрешением 640*480.
Создание алгоритма для определения
ориентации по ключевым точкам QR кода
Нашей задачей является определение
углов поворота QR кода вокруг осей x и y. Информацию об этих углах мы получим,
сравнивая изображение повернутого QR кода, центр которого расположен на
расстоянии Z` от камеры, с QR кодом, находящемся на таком же расстоянии, но в
картинной плоскости, то есть с нулевыми углами поворота. В данной работе мы
используем факт, что координаты точек QR, лежащих на осях ox и oy, изменяются
под влиянием только одного поворота.
Сначала нам нужно узнать координаты
центра p` =(CCx,CCy) QR кода на изображении в системе (u,v) (рисунок 14) .
Определить их примерно можно по формулам (14) и (15).
Рисунок 14 - Картинная плоскость камеры
 15)
15)
 (16)
(16)
где LeftUp, RightUp, LeftDown,
RightDown - ключевые точки изображения QR кода.
Для начала рассмотрим случай
поворота QR кода только вокруг одной оси x (рисунок 15).
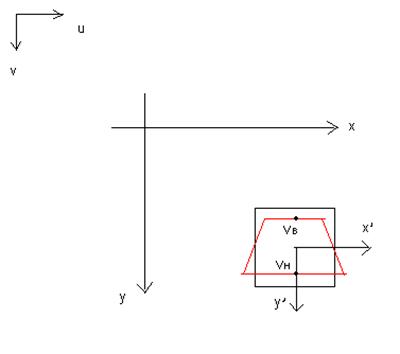
Рисунок 15 - Поворот QR кода вокруг x`
Пусть длина стороны квадрата равна A, тогда в
системе (x`,y`) вершины квадрата, лежащего в картинной плоскости имеют
координаты (-A/2,-A/2); (A/2,-A/2); (A/2,A/2); (-A/2,A/2). Предположим, QR код
повернут вокруг x` на угол a, тогда координаты точек этого квадрата, лежащих на
оси ох` не изменятся, а координаты точек Vв и Vн, лежащих на оси oy`,
уменьшатся. Используя рисунок, на котором представлен вид сбоку, можно выразить
координату точки Vн в системе (X,Y,Z) через a (рисунок 16).
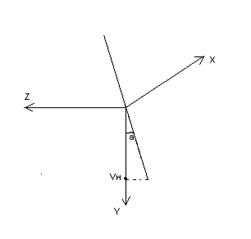
Рисунок 16 - Плоскость QR кода, вид сбоку
 (17)
(17)
После поворота по часовой стрелке
вокруг оси ox` точка Vн стала находиться ближе к камере, а значит, ее
координата Z уменьшилась на sin(a)*A/2.
Используя формулу (13), выразим
координату точки Vн в системе (u,v) через a и получим формулу (18):
 , (18)
, (18)
где Z` - координата центра квадрата.
Значение Vн получаем из анализа
изображения. Зная Z` мы находим угол поворота a. Аналогичным образом определим
угол поворота b вокруг оси oy.
При повороте вокруг оси oy
координаты точек кода, лежащих на оси oy не изменятся, а по изменению координат
точек, лежащих на оси ox, можно судить об угле b (рисунок 17).
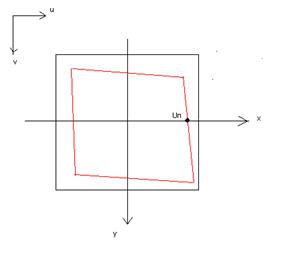
Рисунок 17 - Поворот вокруг обеих осей x и y
При повороте против часовой стрелки вокруг oy
координата Z точки Uп увеличится и станет равна Z`+A/2*sin(b), а координата X
уменьшится и станет равна cos(b)*A/2.
 (19)
(19)
Используя формулу (19) и зная Z`,
находим искомый угол b.
Определение угла поворота QR кода в
картинной плоскости камеры, т. е. в плоскости xoy, будет производиться путем
анализа координат центров верхней левой и верхней правой мишеней. При нулевом
угле поворота координаты  у обеих
мишеней совпадают, а при повороте кода изменяются. По разности ∆координат
можно судить об угле поворота.
у обеих
мишеней совпадают, а при повороте кода изменяются. По разности ∆координат
можно судить об угле поворота.
3. Программное обеспечение для
распознавания QR кода и определения его ориентации
3.1 Описание программы
Программа представляет собой приложение для
распознавания кода и определения углов поворота плоскости, в которой он лежит,
относительно камеры. Для распознавания QR кода нами была использована
библиотека для работы с компьютерным зрением OpenCV. С помощью нее кадры,
поступающие с камеры, обрабатываются и проверяются на наличие QR кода. Работу
части программы, отвечающей за детектирование, описывает блок схема,
изображенная на рисунке 18.
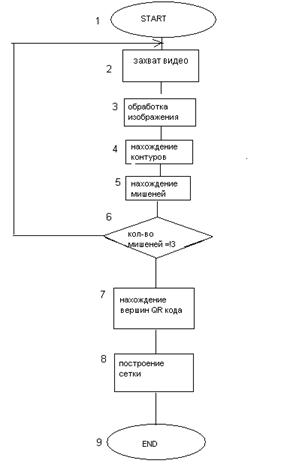
Рисунок 18 - Блок-схема алгоритма обнаружения QR
кода
Построенный на первом этапе массив нулей и
единиц далее расшифровывается на основе алгоритма, приведенного в спецификации
[5]. Блок-схема, изображенная на рисунке 19 графически отображает шаги, которые
необходимо пройти для расшифровки QR кода.
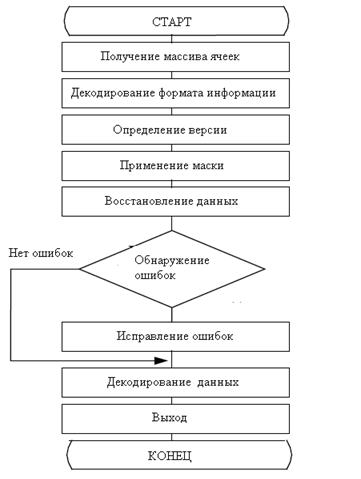
Рисунок 19 - Блок-схема алгоритма расшифровки QR
кода
Информация о координатах вершин QR кода,
полученная в ходе его распознавания, используется для нахождения
пространственной ориентации плоскости QR кода.
3.2 Тестирование программы
При запуске программы начинается видеозахват с
камеры. Все снимки делаются автоматически (рисунок 20).

Рисунок 20 - Снимок QR кода
На камеру поступает картинка каждые 33 мc,
автоматически обрабатывается и сканируется на наличие мишеней (рисунок 22).

Рисунок 21 - Снимок после порогового
преобразования

Рисунок 22 - Снимок с нарисованными на нем
найденными мишенями
Как только поступает изображение, имеющее 3
мишени, запускается код распознавания: находятся вершины QR кода, строится
сетка и далее массив нулей и единиц, который выводится в консоль и записывается
в файл (рисунок 23).
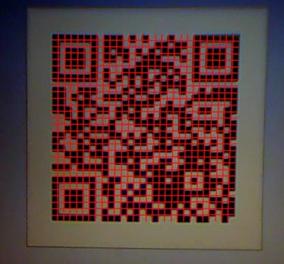
Рисунок 23 - Снимок с нарисованной на нем
построенной сеткой
В соответствии с алгоритмом распознавания,
описанным в спецификации, происходит расшифровка полученного массива бит, и
таким образом мы получаем информацию о предмете, на который нанесен QR код.
Далее в соответствии с разработанным алгоритмом
мы определяем ориентацию кода относительно камеры, т. е. углы поворота в
системе координат, связанной с камерой и выводим результаты в консоль (рисунок
24).
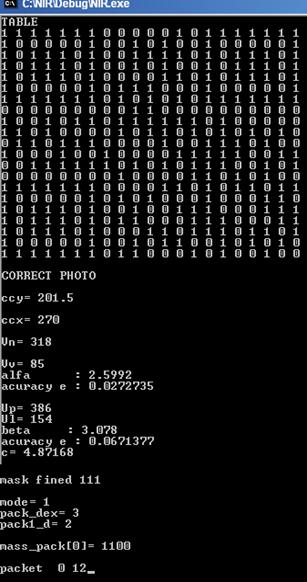
Рисунок 24 - Вывод результатов в консоль
4. Применение разработанного
программного обеспечения
Разработанное программное обеспечение может быть
применено для создания систем технического зрения, необходимого компонента для
организации адаптивного управления. Эти системы обладают следующими признаками:
) возможностью выделения существенной информации
из множества независимых признаков;
) способностью к обучению на примерах и
обобщению этих знаний с целью их применения в новых ситуациях;
) возможностью восстановления событий по
неполной информации;
) способностью определять цели и формулировать
планы для достижения этих целей.
В основе технического зрения лежит аналитическая
формализация, направленная на решение конкретных задач. В нашем случае данные,
полученные на выходе программы, будут использоваться роботом для поиска
определенных объектов. Манипулятор робота будет позиционироваться при захвате
объекта, маркированного QR кодом на основе информации, зашифрованной в QR коде
и информации о пространственной ориентации плоскости QR кода.
Заключение
В ходе выполнения работы был разработан и
программно реализован на языке C++ и с помощью библиотеки OpenCV алгоритм
обнаружения QR кода. На основе спецификации ISO/IEC 18004 Information
technology - Automatic identification and data capture techniques - Bar code
symbology - QR Code изучен и программно реализован алгоритм расшифровки QR
кода. Также был разработан алгоритм определения углов смещения QR кода на
основе данных о координатах ключевых точек QR кода, полученных при его
распознавании. Значения определенных углов являются приблизительными, возможны
отклонения от истинных значений в размере 20%, что установлено
экспериментальным путем. Разработанное программное обеспечение может быть
использовано для позиционирования манипуляторов роботов в случаях, когда не
требуется высокая точность.
Список использованных источников
1.
Детектирование QR Code с помощью средств OpenCV [Электронный ресурс] - Режим
доступа: http://recog.ru/blog/barcode/3.html. - Загл. с экрана. (Дата
обращения: 20.05.2013).
.
Gary Bradski, Adrian Kaehler. Learning OpenCV.: издательство
O'Reilly, 2008. -577с.
.
ISO/IEC 18004 Information technology - Automatic identification and data
capture techniques - Bar code symbology - QR Code. - 122c.
4.
Фрайден Дж. Современные датчики. Справочник. - М.: издательский центр
Техносфера, 2006 - 801 с.
.
Назаров А.С. Фотограмметрия: учеб. пособие для студентов вузов. - Мн.:
ТетраСистемс, 2006. - 368 с.
. Форсайт
Дэвид А. Компьютерное зрение. Современный подход. - М.: издательский дом
"Вильямс", 2004.- 928с.