Полный штурманский расчет полета по маршруту
Введение
Развитие гражданской авиации открывает новые и
всё более широкие возможности её практического использования. Современные ЛА
выполняют полёты в любое время года и суток, в различных метеорологических,
климатических и географических условиях. Для вождения ЛА по заданным маршрутам
требуются специальные знания и определённые технические средства, которые
изучает воздушная навигация.
Воздушной навигацией называется прикладная наука
о точном, надёжном и безопасном вождении ЛА из одной точки земной поверхности в
другую по установленной пространственно-временной траектории. ВН является одной
из основных авиационных наук, которая отражает современные средства и способы
вождения ЛА. Изучение данной науки является обязательным для пилотов,
штурманов, бортовых радистов и диспетчеров службы движения. Без твёрдого знания
основ теории и умения решать практические задачи ВН невозможно точное, надёжное
и безопасное вождение ЛА.
Данная курсовая работа посвящена полному
штурманскому расчёту полёта по маршруту. Рассчитывались следующие элементы:
Ортодромический путевой угол ОПУ, ортодромическое расстояние Sорт,
безопасная высота Hбез,
безопасный эшелон Hэш. без;
путевую скорость W, угол сноса
УС, время, путь (для набора, снижения и горизонтального полёта); магнитный курс
подхода к 4 развороту МКподх., магнитный курс обхода грозового очага МКобх.,
высоту обхода грозового очага Нобх., магнитный курс выхода на трассу после
обхода грозового очага МКвых.
1.Теоретическая часть
.1 Линия пути, линия положения (определение, характеристика,
применение)
Основные линии пути, используемые в навигации:
В навигации имеются два вида линии пути:
ортодромическая и локсодромическая. Каждая из них имеет определенные свойства и
геометрический вид на земном шаре.
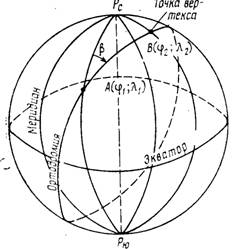
Ортодромия - линия кратчайшего расстояния между
двумя точками на поверхности земного шара. Геометрически ортодромия
представляет собой дугу большого круга. В общем случае она пересекает меридианы
под различными углами. Угол, под которым ортодромия в начальной точке
пересекает меридиан, принято называть ортодромическим путевым углом ОПУ.
В частных случаях ортодромия может совпадать с
одним из меридианов или экватором. При этом ОПУ остается постоянным и равным в
первом случае 0 или 1800, а во втором - 90 или 2700.
Полет по ортодромии может быть выполнен только с
помощью курсовых приборов, способных измерять условный курс.
На полетных картах ортодромия между двумя
точками, расположенными на расстоянии до 1000 - 1200 км, практически
изображается прямой линией. При этом ОПУ и длину по ортодромии можно измерить
по карте.

На больших расстояниях ортодромия
имеет вид кривой линии, обращенной выпуклостью к полюсу. В этом случае ОПУ
рассчитывают по формулам сферической тригонометрии:
Расчет длины пути по ортодромии
между двумя точками выполняют по одной из следующих формул:


Локсодромия - линия на поверхности земного шара,
пересекающая меридианы под постоянным углом. Угол, под которым локсодромия
пересекает меридианы, называется локсодромическим путевым углом. В общем случае
локсодромия представляет собой пространственную логарифмическую спираль,
которая огибает земной шар бесконечное число раз и стремится к полюсу, но
никогда не достигает его.
Своей выпуклостью она обращена всегда к
экватору. Указанный вид локсодромии объясняется тем, что ее путевой угол
относительно каждого меридиана остается постоянным, а сами меридианы не
параллельны друг другу, а сходятся к полюсам. Исключение составляют меридианы,
параллели и экватор, которые также являются локсодромическими линиями.

Путь по локсодромии длиннее пути по ортодромии,
кроме случаев, когда она совпадает с меридианом или экватором.
Разность длин зависит от разности долгот
начальной и конечной точкой точек локсодромии, ее направления и значения
широты. Наибольшая разность длин имеет место, когда локсодромия совпадает с
параллелью.
Локсодромический путевой угол для каждого
участка маршрута измеряют непосредственно на карте транспортиром относительно
среднего меридиана данного участка. Длину пути по локсодромии также измеряют на
карте с помощью сантиметровой линейки. Полет по локсодромии выполняется с
постоянным курсом, выдерживаемым по магнитному или гироскопическому компасу,
поэтому технически он проще, чем полет по ортодромии. Однако полет по
локсодромии экономически невыгоден, так как выполняется не по кратчайшему пути.
Линии положения ЛА:
Линией положения (ЛП) называется воображаемая
линия на земной поверхности или линия на карте вероятного местонахождения ЛА,
характеризующаяся постоянством измеренного навигационного параметра.
Каждую ЛП определяют по результатам измерения
какой-либо величины, например, угла, расстояния, разности расстояний, высоты
небесного светила
Основными ЛП являются линии равных азимутов,
расстояний, разности расстояний и высот светила.
Линия равных азимутов (пеленгов) - линия
положения, характеризуемая постоянством измеренного азимута (пеленга).
Линия равного пеленга (ЛРП) представляет собой
линию, проходящую через радионавигационную точку (РНТ) и ВС. Для всех типов
угломерных радионавигационных систем эта линия является основным видом линий
положения. Так как радиоволны обладают свойством распространятся по кротчайшему
расстоянию, то, следовательно, ЛРП является ортодромией.
Линия равных дальностей (расстояний) (ЛРР) -
линия положения, все точки которой находятся на одинаковом удалении от
некоторой фиксированной точки на земной поверхности. Как линия положения ЛРР
получается при использовании дальномерных радионавигационных систем. На
поверхности земного шара она изображается окружностью малого круга.
Линия равных разностей расстояний (ЛРРР) - линия
положения, в каждой точке которой разность расстояний до двух наземных
радионавигационных станций имеет постоянное значение. Такие ЛП образуются при
применении разностно-дальномерных радиотехнических систем дальней навигации
(РСДН), обычно называемых гиперболическими системами. На картах они имеют вид гипербол,
точное построение которых требует сложных расчетов. Поэтому сетка гипербол
печатается на специальных картах при их издании.
Астрономическая линия положения (АЛП) -
представляет собой отрезок прямой линии, касательной к кругу равных высот
светила. Элементы этой линии рассчитывают по измеренной с помощью секстанта
высоте небесного светила. Как линия положения АЛП всегда перпендикулярна
азимуту светила в момент его наблюдения.
.2 Навигационные системы координат, применяемые
в авиации
В авиационной навигации используются следующие
системы координат (СК):
Глобальные жестко связаны с Землёй и применяются
для навигации охватывающей всю земную поверхность или значительную её часть.
Наиболее распространёнными являются:
Геодезическая (географическая). В качестве
модели Земли используется общеземной эллипсоид (типа WGS-84 или ПЗ-90).
Положение точек определяется геодезическими широтой и долготой. Геодезической
широтой называется угол между нормалью к поверхности эллипсоида и плоскостью
экватора. Геодезической долготой называется двугранный угол между плоскостями
начального (гринвичского) меридиана и меридиана данной точки.
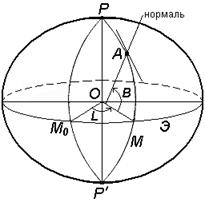
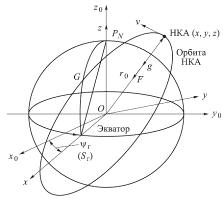
Нормальная сферическая (геоцентрическая) СК
предназначена для определения координат точки на сфере. Способ отсчёта
геоцентрической долготы совпадает со способом отсчёта геодезической долготы.
Отсчёт геоцентрической широты производится от плоскости экватора к направлению
радиус-вектора, соединяющего центр сферы с данной точкой.
Ортодромическая
<#"702120.files/image008.gif">
Главноортодромическая
<#"702120.files/image009.gif"> <#"702120.files/image010.gif"> <#"702120.files/image011.gif"> <#"702120.files/image012.jpg">
Изменение атмосферного давления с высотой
характеризуют барометрической ступенью - высотой, на которую надо подняться или
опуститься от исходного уровня, чтобы давление изменилось на 1 мм рт. ст.
В практике барометрическую ступень для малых
высот берут равной 11 м. Следовательно, каждому миллиметру изменения давления у
земли соответствует 11 м высоты, т. е. ΔНб=11·ΔР.
Классификация высот в зависимости от уровня
отсчета:
истинная;
относительная;
абсолютная;
высота эшелона.
Истинной высотой (Нист) называется высота полета
относительно точки местности, над которой находится ВС.
Относительной высотой (Нотн) называется высота
полета, отсчитываемая от некоторого условного уровня (например, аэродрома);
Абсолютной высотой (Набс) называется высота
полета, измеряемая от уровня моря.
Высотой эшелона (Нэш) называется высота полета,
измеряемая от уровня изобарической поверхности с давлением 760 мм рт.ст.
Расчет высоты полета
Расчет предусматривает учет погрешностей барометрического
высотомера путем ввода поправок в показание прибора для получения
действительного значения измеряемой величины. Он выполняется либо для
определения показания прибора, обеспечивающего выполнение полета на заданной
истинной высоте, либо для определения истинной высоты полета по показанию
прибора. Указанные расчеты выполняются для уровня давления, который будет
установлен на высотомере:
аэродрома взлета;
минимального приведенного по маршруту;
760 мм рт. ст.
Определение показания высотомера от давления
аэродрома для полета на заданной истинной высоте производится при выполнении
полетов по маршруту на вертолетах без выхода из района аэродрома с посадкой на
аэродроме взлета. Расчет выполняется по формуле:
Нпр. аэр = Нист + dНрел + dНбар - dНтемп.
Безопасная высота эшелона рассчитывается по
формуле:
Hэш. без ≥
Нпреп.max+МОС -  +(760 - Pприв.min)*11(м)
+(760 - Pприв.min)*11(м)
Безопасная высота рассчитывается по
формуле:
=Нпреп. макс.+300
м - расстояние, используемое для
равнинной местности
.4 Измерение воздушной скорости, учет ошибок
аэродинамического метода измерения воздушной скорости, расчет воздушной
скорости полета
Знание скорости полета необходимо как для
пилотирования самолета, так и для целей аэронавигации.
Для целей навигации знание скорости полета
необходимо для выполнения различных навигационных расчетов.
Различают воздушную и путевую скорости самолета,
измеряются они в километрах в час (км/ч).
Воздушной скоростью V
называется скорость самолета относительно воздушной среды. Воздушная скорость
измеряется указателем воздушной скорости.
Расчет воздушной скорости полета
Для учета погрешностей указателя скорости
выполняются два вида расчетов: расчет показаний указателя скорости для полета с
заданной истинной воздушной скоростью или расчет истинной воздушной скорости по
показаниям указателя скорости.
Расчет показаний указателя скорости для полета с
заданной истинной воздушной скоростью:
Vпp
= V - Δ Vпл
- Δ Vсум
Расчет истинной воздушной скорости по показаниям
указателя скорости:
= Vпр
+ ΔVсум
+ ΔVпл
Ошибки указателя воздушной скорости
Указатель воздушной скорости имеет
инструментальные, аэродинамические и методические ошибки.
Инструментальные ошибки ΔVи
возникают вследствие несовершенства изготовления прибора и неточности его
регулировки , износ деталей, изменение упругих свойств анероидных приборов и т.
д. Каждый указатель скорости имеет свои инструментальные ошибки. Они
определяются путем проверки высотомера, заносятся в специальную таблицу и
учитываются в полете.
Аэродинамические ошибки ΔVa
возникают вследствие искажения воздушного потока в том месте, где установлен
приемник воздушного давления. Характер и величина этих ошибок зависят от типа
самолета, места установки приемника воздушного давления и скорости полета. При
больших скоростях поток воздуха вокруг самолета искажается. Вследствие этого
воспринимаемое приемником давление оказывается неправильным и в показаниях
указателя скорости возникают аэродинамические ошибки. На скоростных самолетах
они могут достигать 30-40 км/ч. Аэродинамические ошибки определяются на заводе
при выпуске самолета и заносятся в специальный график или таблицу поправок. На
некоторых самолетах для упрощения учета поправок указателя скорости
составляется таблица суммарных поправок, учитывающая инструментальные и аэродинамические
ошибки. ΔVи .
ΔV∑
= ΔVи + ΔVa
Методические ошибки возникают вследствие
несовпадения фактической плотности воздуха с плотностью, принятой при расчете
шкалы указателя скорости.
Принцип работы указателей скорости основан на
измерении скоростного напора q.
Скоростной напор является функцией, плотности воздуха р и воздушной скорости
полета.
показания указателя скорости верны только при
стандартной плотности воздуха, которая бывает у земли при давлении 760 мм рт.
ст. и температуре +15°С. Фактическая плотность воздуха часто отличается от
расчетной. С увеличением высоты плотность воздуха уменьшается, вследствие чего
указатель скорости показывает скорость меньше истинной.
Ошибка указателя скорости, зависящая от
плотности воздуха, учитывается при помощи навигационной линейки по температуре
воздуха и высоте полета, от значения которых, как известно, зависит плотность
воздуха.
Методические ошибки указателя скорости возникают
также вследствие сжимаемости воздуха. При полете на скоростях более 400 км/ч воздух
впереди самолета сжимается и его плотность увеличивается, что вызывает
увеличение скоростного напора и, следовательно, завышение показаний указателя
скорости.
Методические ошибки приводят к значительному
расхождению приборной скорости с истинной, особенно при полетах на больших
высотах и скоростях. Поэтому для скоростных и высотных самолетов разработаны
двухстрелочные комбинированные указатели скорости, измеряющие как приборную
скорость, которая используется для пилотирования самолета, так и истинную,
используемую для целей навигации.
1.5 Способы измерения курса. Зависимость между
курсами
Измерение курса воздушного судна.
Курсом ВС (К) называется угол в горизонтальной
плоскости между северным направлением меридиана, проходящего через ВС, и
проекцией продольной оси на эту плоскость. Курс измеряется от северного
направления меридиана по ходу часовой стрелки от 0 до 360°.
Курс определяет направление полета ВС в
воздушной среде. Для определения и выдерживания курса на ВС устанавливаются
компасы или курсовые системы. В основу принципа действия курсовых приборов
положены различные способы измерения курса: магнитный, гироскопический,
астрономический.
Магнитный способ определения курса основан на
использовании свойств магнитного поля Земли.
Гироскопический способ основан на использовании
свойства главной оси гироскопа стабилизироваться в определенном направлении.
Астрономический способ основан на использовании
фотоэлектрического эффекта для измерения направления на источники светового и
радиоизлучения небесных тел.
В практике воздушной навигации широкое
применение имеют магнитный и гироскопический способы измерения курса. Эти
способы применяются для измерения курса в магнитных и гироиндукционных
компасах, курсовых системах.
Магнитный способ измерения курса ВС.
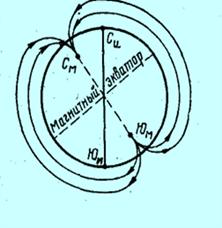
Земля представляет собой большой естественный
магнит, вокруг которого существует магнитное поле.
Магнитные полюсы Земли не совпадают с
географическими и располагаются не на поверхности Земли, а на некоторой
глубине.
Магнитные силовые линии выходят из южного
магнитного полюса и входят в северный. Свободно подвешенная магнитная стрелка
устанавливается вдоль магнитных силовых линий.
Магнитным меридианом называется линия, вдоль
которой устанавливается свободно подвешенная магнитная стрелка под действием
земного магнетизма.
Гироскопический способ измерения курса ВС .
Для измерения курса ВС используется гироскоп с
тремя степенями свободы и горизонтальным расположением главной оси (такой
гироскоп называют курсовым). В полете изменяется азимут опорного
направления-главной оси курсового гироскопа.
Причинами изменения азимута главной оси
курсового гироскопа являются:
вращение Земли вокруг своей оси;
перемещение ЛА в пространстве;
собственное движение в плоскости горизонта
(уход) главной оси курсового гироскопа.
Зависимость между курсами:
Истинным курсом ИК называется угол, заключенный
между северным направлением истинного меридиана, проходящего через самолет, и
продольной осью самолета.
Магнитным курсом МК называется угол, заключенный
между северным направлением магнитного меридиана, проходящего через самолет, и
продольной осью самолета.
Компасным курсом КК называется угол, заключенный
между северным направлением компасного меридиана, проходящего через самолет, и
продольной осью самолета.
Ортодромический курс OK - угол между касательной
к ортодромической параллели (меридиану) и продольной осью ВС.
Условный курс УК - угол между северным
направлением условного меридиана и продольной осью ВС.При выполнении различных
навигационных расчетов приходится переходить от одного курса к другому.
Dм
- магнитное склонение - угол, заключенный между северными направлениями
истинного и магнитного меридианов в данной точке. Отсчитывается от истинного
меридиана и измеряется от 0 до ± 180° по ходу часовой стрелки со знаком плюс,
против хода стрелки-со знаком минус
Dк-
девиация компаса - угол между северными направлениями магнитного и компасного
меридианов . Отсчитывается от магнитного меридиана вправо со знаком плюс, а
влево - со знаком минус.
DА
- азимутальная поправка - угол между условным и истинным меридианом .
Измеряется от условного меридиана. Измеряется в пределах ± 180° по ходу часовой
стрелки со знаком плюс, против хода стрелки - со знаком минус.
DМу
- условное магнитное склонение - угол между условным и магнитным меридианом.
Измеряется от условного меридиана. Измеряется в пределах ± 180° по ходу часовой
стрелки со знаком плюс, против хода стрелки - со знаком минус.
bи, bм - направления
главной ортодромии, измеренные соответственно от истинного и магнитного
меридианов.
.6 Характеристика ветра. Навигационный
треугольник скоростей, зависимость между элементами и порядок расчета основных
элементов
Воздушные массы постоянно движутся относительно
земной поверхности. Горизонтальное движение воздушных масс называется ветром.
Ветер характеризуется скоростью и направлением. С увеличением высоты в
большинстве случаев скорость ветра увеличивается, а направление изменяется.
Для обеспечения точной навигации необходимо
учитывать влияние ветра на полет ВС. До полета скорость и направление ветра по
высотам определяют на метеостанции по картам барической топографии.
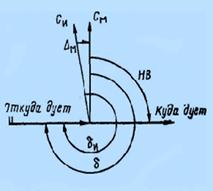
Существует два понятия о направлении ветра:
навигационное и метеорологическое.
Метеорологическим направлением ветра называется
угол, заключенный между северным направлением меридиана и направлением из
точки, откуда дует ветер.
Обычно на метеостанции отсчитывают
метеорологическое направление ветра относительно северного направления
истинного меридиана, т. е. угол δи.
Навигационным направлением ветра (НВ) называется
угол, заключенный между северным направлением магнитного меридиана и
направлением в точку, куда дует ветер. Отсчитывается оно от северного
направления магнитного меридиана по часовой стрелке от 0 до 360°
Экипажам, производящим взлет и посадку,
сообщается метеорологический ветер.
Отсчитанное от истинного меридиана направление
ветра можно перевести в направление ветра, отсчитанное относительно магнитного
меридиана.
навигация полет высота курс
δ = δи-(±Δм)
Магнитное склонение Δм
берется для района расположения метеостанции.
В штурманских расчетах используется
навигационное направление ветра, или так называемый навигационный ветер.
Перевод метеорологического направления ветра в навигационное и обратно
выполняется по формулам: НВ = δ ± 180°;
δ = НВ ± 180°.
Скоростью ветра U
называется скорость движения воздушных масс относительно земной поверхности.
Скорость ветра измеряется в километрах в час или в метрах в секунду. Чтобы перейти
от одних единиц измерения к другим, например от метров в секунду к километрам в
час, необходимо скорость ветра в метрах в секунду умножить на 3,6, т: е. U
км/ч = U м/сек·3,6:

Перевод скорости ветра, выраженной в
метрах в секунду, в скорость, выраженную в километрах в час, можно осуществлять
подсчетом в уме по упрощенной формуле :
 U км/ч = U
м/сек · 4
U км/ч = U
м/сек · 4
U
км/ч = U
м/сек / 4
Навигационный треугольник скоростей,
его элементы и их взаимозависимость :
Одновременно под действием ветра ВС
перемещается вместе с воздушной массой относительно поверхности земли,
называемой путевой скоростью.
Таким образом, при полете с боковым
ветром векторы воздушной скорости, путевой скорости и скорости ветра образуют треугольник,
который называется навигационным треугольником скоростей
Вектором воздушной скорости
называется направление и скорость движения ВС относительно воздушных масс. Его
направление определяется курсом ВС, а величина - значением воздушной скорости.
Вектором путевой скорости называется
направление и скорость движения ВС относительно земной поверхности. Его
направление определяется путевым углом, а величина - значением путевой
скорости.
Вектором ветра называется
направление и скорость движения воздушной массы относительно земной
поверхности. Его направление определяется направлением ветра, а величина -
значением его скорости.
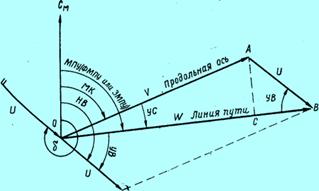
Навигационный треугольник скоростей
имеет следующие элементы:
МК - магнитный курс ВС; V - воздушная
скорость; МПУ- магнитный путевой угол (может быть заданным -ЗМПУ и фактическим
- ФМПУ); W - путевая
скорость; НВ - навигационное направление ветра; U - скорость
ветра; УС - угол сноса; УВ - угол ветра.
Между элементами навигационного
треугольника скоростей существует следующая зависимость:
МК = МПУ - (± УС);
МПУ = МК + (± УС);
УС = МПУ-МК; W = VсоsУС +
UсоsУВ;
УВ = δ ± 180° - МПУ; δ = МПУ + УВ ±
180°
Фактическим магнитным путевым углом
называется угол, заключенный между северным направлением магнитного меридиана и
линией фактического пути. Отсчитывается от северного направления магнитного
меридиана до линии фактического пути по ходу часовой стрелки от 0 до 360°.
Углом сноса называется угол,
заключенный между продольной осью ВС и линией пути. Отсчитывается от продольной
оси ВС до линии пути вправо со знаком плюс и влево со знаком минус.
Углом ветра называется угол,
заключенный между линией пути (фактической или заданной) и направлением
навигационного ветра. Отсчитывается от линии пути до направления ветра по ходу
часовой стрелки от 0 до 360°.
Угол сноса и путевая скорость
являются основными навигационными элементами, поэтому нужно твердо знать, как
они зависят от изменения воздушной скорости, скорости ветра и угла ветра.
.7 Контоль пути по направлению и
дальности
Контроль пути по направлению и дальности может
осуществляться с помощью боковых радиолокаторов путем нанесения на карту места
самолета по переданным на борт самолета азимуту и дальности. Такой контроль
можно осуществить и без прокладки А и Д на карте, что сокращает время на
получение необходимых данных контроля пути.
При использовании боковых радиолокаторов для
контроля пути по направлению и дальности без прокладки на карте пеленга и
дальности необходимо:
. При подготовке карты к полету нанести на ЛЗП
точку траверза от бокового радиолокатора, измерить расстояние по линии траверза
от радиолокатора до ЛЗП и определить А точки траверза.
. В полете, когда необходимо проконтролировать
путь по направлению и дальности, запросить у диспетчера место самолета и
определить угол α.
. Рассчитать на НЛ-10М расстояние по ЛЗП от
самолета до точки траверза и расстояние от радиолокатора по линии траверза.
. Определить сторону и величину линейного
бокового уклонения.
Контроль пути по направлению заключается в определении
фактического путевого угла и бокового уклонения от ЛЗП. Главное внимание при
этом должно быть уделено наблюдению за сохранением рассчитанного курса
следования.
В зависимости от условий полета и оборудования
самолета контроль пути по направлению осуществляется следующими способами:
) визуально по наземным линейным ориентирам,
идущим параллельно ЛЗП;
) по последовательным отметкам места самолета;
) по результатам периодических измерений угла
сноса в по лете;
) по пеленгам радиостанций и радиопеленгаторов,
расположенных на ЛЗП, а также по данным радиолокаторов, расположенных как на
ЛЗП, так и в стороне от нее;
) по данным угломерно-дальномерной системы,
навигацион ного индикатора и измерениям, произведенным бортовым радио
локатором;
) по астрономической линии положения самолета,
проложен ной на карте параллельно ЛЗП (светило сбоку).
Контроль пути по дальности состоит в определении
пройденного или оставшегося до ППМ (КПМ) расстояния и своевременности прохода
заданных ориентиров. При контроле пути по дальности основное внимание уделяется
наблюдению за сохранением рас считанной воздушной скорости.
В зависимости от навигационной обстановки и
оборудования самолета контроль пути по дальности осуществляется следующими
способами:
) визуально по линейным ориентирам, пересекающим
линию пути, или по характерным боковым ориентирам, расположенным на траверзе;
) прокладкой пройденного расстояния от последней
отметки места самолета по времени и путевой скорости полета;
) прокладкой радиопеленгов от боковых РНТ;
) по данным угломерно-дальномерной системы,
навигационного индикатора и измерениям, произведенным с помощью бортового
радиолокатора;
) прокладкой астрономической линии положения
самолета на карте перпендикулярно к линии пути (светило впереди или позади
самолета).
2.Расчётная часть
Маршрут полёта: Минск(53°30´;
27°34´) - Мурманск(68°58´
33°06´)
Таблица исходных данных
|
МК
посадки
|
165°
|
|
δнаб
|
160°
|
|
δг.л.
|
110°
|
|
δсниж
|
140°
|
|
Uв.наб.
|
50
км/ч
|
|
Uв.г.п.
|
80
км/ч
|
|
Uв.сниж.
|
30
км/ч
|
|
Обход
грозы верхом
|
|
Нобнаружения
(км)
|
1,5
|
|
УГ
|
2,15°
|
|
Dгрозы (км)
|
70
|
|
Обход
грозы боком
|
|
КУГгрозы
|
339°
|
|
Dгрозы (км)
|
80
|
|
Для
расчета заправки топливом
|
|
Эшелон
|
|
Vв.наб.
|
12
м/с
|
|
Vв.сниж.
|
17
м/с
|
|
Vист.наб.
|
670
км/ч
|
|
Vист.г.п.
|
850
км/ч
|
|
Vист.сниж.
|
720
км/ч
|
|
Qнабор (т/ч)
|
9
|
|
Qснижение (т/ч)
|
3,5
|
|
Qгп (т/ч)
|
5,5
|
|
Qзапуск, руление
|
0,3
|
|
Поправка
на топливомер
|
3%
|
|
Qзаход на посадку
|
0,5
|
|
Qзап.аэродром
|
6
|
|
Qвзл. до 100 м
|
0,6
|
|
Нрел
|
240
|
|
Наэр
|
170
|
|
Раэр
|
743
|
|
t0 (при взл.)
|
-7
|
|
Нпреп
|
350
|
|
Рприв
|
764
|
|
t0 (при сниж.)
|
+11
|
|
Высота
входа в глиссаду
|
600
м
|
.1 Ортодромический путевой угол - ОПУ
ctgβ=cosφ1*tgφ2*cosec(λ2
- λ1)
- sinφ1*ctg(λ2
- λ1)


ctg β=0.59*2.65*10.4 -
0.8*11=1.563*10.4 - 8.8=16.25 - 8.8=7.45


.2 Ортодромическое расстояние - Sорт
Sорт=sin
φ1*sinφ2
+ cosφ1*cosφ2*cos
(λ2 - λ1)
cos
Sорт=0.8*0.93+0.59*0.35*0.99=0.74+0.20=0.94
 Sорт=19.95*111=2210
км
Sорт=19.95*111=2210
км
Длина дуги  меридиана = 111 км.
меридиана = 111 км.
.3 Безопасная высота - Нбез
=Нпреп. макс.+300
м - расстояние, используемое для
равнинной местности
Нпреп. макс.=Набс+ =50+266=316 м
=50+266=316 м
Набс=50 м (превышение искусственного
препятствия)
=266 м (для данного аэропорта
назначения)
=Нпреп. макс.+300 = 316+300=616 м
.4 Безопасный эшелон -Hэш.
без
Hэш. без ≥
Нпреп.max+МОС - +(760 - Pприв.min)*11(м)
Hэш. без ≥
316+300 - ( - 43.1)+(-4)*11=615.1

Ниспр=МОС+ Нпреп.max=300+316=616
где Н0 - относительная высота,
Н760 - высота эшелона
.5 Набор высоты
угол сноса - УС:
МПУ=ОПУ - ( )=
)=
УВ=
sin УС
=  0.02=
0.02=
путевая скорость
- W:
Wнаб=Vист.наб*cosУС+Uнаб*cosУВ=670*0.99+50*(-0.92)=663.3+(-46)=663.3
- 46 =617.3 км
время набора tнаб:
наб=
путь набора - Sнаб:
наб=Wнаб*tнаб=617.3*0.25=154.3
км
.6 Снижение
угол сноса - УС:
МПУ=ОПУ - ()=
УВ=
sin УС
=  0.028=
0.028=
путевая скорость - W:
сниж=Vист.сниж*cosУС+Uсниж*cosУВ=720*0.99+30*(-0.73)=712.8
- 21.9 =690.9 км
время снижения tсниж:
сниж=
путь снижения - Sсниж:
сниж=Wсниж*tсниж=690.9*0.18=124
км
2.7 Горизонтальный полёт
угол сноса - УС:
МПУ=ОПУ - ()=
УВ=
sin УС
=  0.089=
0.089=
путевая скорость
- W:
г.п.=Vист.г.п.*cosУС+Uв.г.п.*cosУВ=850*0.99+80*(-0.29)=841.5
- 23.2 =818.3км
время горизонтального полёта tг.п.:
г.п.=
Sг.п.=Sорт - Sнаб - Sсниж=2210 -
154.3 - 124 =1932 км
ОПУ=
УС=
ОПУ=МКг.п.+
МКг.п.=МКполёта
МКг.п.=ОПУ - =
.8 Магнитный курс подхода к 4 развороту - МКподх

Необходимо найти  (угол отворота).
(угол отворота).
Очевидно, что sin  , тогда:
, тогда:






 =68.8
=68.8


= 
2.9 Магнитный курс обхода грозового очага -
МКобх
Обход грозового очага верхом:
Для пересечения грозового фронта сверху
необходимо:
- отсчитать угол подъёма антенны по
шкале и определить угловое превышение верхней границы грозовых очагов  ,где
,где
УП =  (угол подъёма антенны),
(угол подъёма антенны),  =
= (ширина диаграммы направленности
антенны в вертикальной плоскости).
(ширина диаграммы направленности
антенны в вертикальной плоскости).

вычислить линейное превышение
грозовых очагов относительно плоскости стабилизации антенны  = 70*tg
= 70*tg =70*0.01=0.8 км=800 м.
=70*0.01=0.8 км=800 м.
учесть поправку на сферичность Земли
 , где
, где  - поправка на сферичность Земли, м,
а S - дальность
до грозы, км.
- поправка на сферичность Земли, м,
а S - дальность
до грозы, км.

Т.к. S = 70 км, то
Обход грозового очага боком:

где L - ширина
грозового очага, КУГ - курсовой угол грозы
Т.к.  , то, чтобы избежать отрицательного
значения, введём поправку на
, то, чтобы избежать отрицательного
значения, введём поправку на  , тогда:
, тогда:
 *tg(
*tg( )=
)= *tg
*tg  =80*0.38=30.4 км
=80*0.38=30.4 км
 км
км
Найдём угол отворота грозы:



2.10 Высота обхода грозового очага -

 , где
, где
м - требуемое расстояние по
вертикали между ВС и верхней границей грозового очага, а - поправка на сферичность Земли.
 =0.8 км = 800 м
=0.8 км = 800 м
 + 390 = 12690 м = 12.69 км
+ 390 = 12690 м = 12.69 км
2.11 Магнитный курс выхода на трассу
после обхода грозового очага - 
После обхода грозового очага
необходимо выйти на ЛЗП (линия заданного пути). Для этого требуется рассчитать
магнитный курс выхода на трассу. Как правило угол, на который необходимо
отвернуть ВС, чтобы выйти на ЛЗП, равен  . А значит:
. А значит:

Заключение
Изучив теорию воздушной навигации и проведя
расчёты при выполнении курсового проекта, можно сделать вывод, что воздушная
навигация обеспечивает:
вождение ЛА по траектории, определяемым
маршрутом (трассой) и профилем полёта, с заданной программой, регламентирующей
режимы полёта ЛА с начального пункта маршрута и до конечного пункта в заданное
время;
выдерживание заданных дистанций и интервалов
времени между ЛА на трассах с интенсивным воздушным движением или при выходе с
трассы к аэродрому посадки;
предупреждение о столкновении ЛА в полёте с
наземными препятствиями (естественными и искусственными);
предупреждение сближения двух ЛА в полёте
(встреча с самолётом-танкером для дозаправки горючим и др.).
Для определения навигационных элементов (курса,
сноса угла, путевого угла, воздушной и путевой скоростей, координат
местонахождения ЛА и др.) применяются различные технические средства.
Основой успешного самолётовождения является
комплексное применение технических средств, которое заключается в том, что
самолётовождение осуществляется с помощью не одного какого-либо средства, а
нескольких.
При этом результаты навигационных определений,
полученные с помощью одних средств, уточняются с помощью других средств. Такое
дублирование исключает возможность допущения грубых ошибок, повышает точность и
надежность самолётовождения.
Авиационная техника и технические средства
самолётовождения непрерывно развиваются. Современные самолёты оснащаются
автоматизированными навигационными комплексами, значительно повышающими
точность, надежность и безопасность самолётовождения.
Список используемой литературы
1. ЧерныйМ.А.
Кораблин В.И. Воздушная навигация..М. Транспорт,1983.
2. Марков
В.И.Аэронавигационное обеспечение полетов на международных воздушных линиях.Учебник.
3. АП
организация воздушного движения
4. АП
полетов в ВП РБ.
5. АП
организации и выполнения полетов в ГА РБ (АПОВП ГА-2006)