Исследование модели регистратора колебательных процессов с применением СКМ
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ
БЕЛАРУСЬ
УЧРЕЖДЕНИЕ ОБРАЗОВАНИЯ
ГОМЕЛЬСКИЙ ГОСУДАРСТВЕННЫЙ
ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ИМЕНИ П. О. СУХОГО
Факультет машиностроительный
Кафедра «Информатика»
РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовой работе
по дисциплине «Информатика»
на тему: «Исследование модели
регистратора колебательных процессов с применением СКМ»
Исполнитель:
студент гр. ТМ-22
О.В. Мирончук
Руководитель:
доцент Т.Л. Романькова
Гомель 2013
Содержание
Введение
. Сравнительный анализ Matlab и Mathcad
при моделировании динамических систем
.1 Подсистема Simulink пакета MATLAB
.2 Пакет Mathcad
.3 Сравнительный анализ Matlab и Mathcad
. Алгоритмический анализ задачи
.1 Полная постановка задачи
.2 Анализ исходных данных и результатов
.3 Описание математической модели
.4 Алгоритм расчёта базовой модели и проведения исследований
. Описание реализации в пакете MathCAD
.1 Описание реализации базовой модели
.2 Выводы по результатам исследований
Заключение
Список используемых источников
Приложение А. «Исследование модели регистратора колебательных
процессов с применением СКМ»
Приложение Б. Исследования
Введение
В настоящее время компьютерная промышленность предлагает инженеру целый
ряд разнообразных средств моделирования, позволяющих не только моделировать
сложные динамические системы, но и проводить с ними эксперименты. Наиболее
полное исследование общесистемных проблем получается в результате моделирования
объектов с помощью современных технологий, реализованных в специализированных
вычислительных пакетах или пакетах визуального моделирования.
Пакетов визуального моделирования так же существует великое множество. В
них пользователю предоставляется возможность описывать моделируемую систему
преимущественно в визуальной форме, например, графически представляя как
структуру системы, так и ее поведение (например, при помощи карты состояний).
Такой подход позволяет пользователю не заботится о реальной программной
реализации модели, что значительно упрощает процесс моделирования. Результаты
эксперимента в пакетах визуального моделирования предоставляются в более
наглядной для человека форме: в виде графиков, гистограмм или схем с
применением анимации. Также в той или иной мере поддерживается технология
объектно-ориентированного моделирования, что позволяет повторно использовать
экземпляры моделей с возможностью внесения в них тех или иных коррективов. Из
множества существующих на сегодняшний день пакетов визуального моделирования
особый интерес вызывают универсальные пакеты, не ориентированные на определенную
узкоспециальную область (физика, химия, электроника и т.д.) или определенные
типы моделей (чисто дискретные или чисто непрерывные), а позволяющие
моделировать принадлежащие различным прикладным областям структурно-сложные
гибридные системы. Одними из таких пакетов являются: пакет Mathcad; подсистема Simulink пакета MATLAB а
так же Mathematica и Maple
1
. Сравнительный анализ инструментов MathCad и MatLab при
моделировании динамических систем
.1 Подсистема Simulink пакета MATLAB
- интегрированный с MATLAB интерактивный инструмент для моделирования,
имитации и анализа динамических систем. Он дает возможность строить графические
блок-диаграммы, имитировать динамические системы, исследовать работоспособность
систем, отлаживать и совершенствовать их. Simulink это платформа для
проектирования и имитации работы динамических систем в различных отраслях.
В распоряжении пользователей имеются интерактивная графическая среда и
настраиваемые библиотеки блоков, которые позволят с высокой точностью
проектировать, создавать и тестировать модели цифровых устройств, средств
коммуникации и других динамических систем. Возможности среды Simulink могут
быть расширены путем подключения дополнительных модулей, которые позволят
решать специфические задачи, связанные с моделированием и проектированием, а
также помогут генерировать программный код, реализовывать различные алгоритмы,
выполнять тестирование и проверки. Simulink тесно интегрируется с системой
MATLAB, предоставляя пользователям мгновенный доступ к внушительному набору
средств разработки алгоритмов, визуализации и анализа данных, организации
доступа к данным, а также численных расчетов. Имеется возможность быстро
создавать, моделировать и эксплуатировать подробные блок-схемы систем,
собранные из готовых блоков, предлагаемых в среде Simulink.
Программа Simulink предоставляет набор инструментов для моделирования
иерархических структур, управления данными и настройки подсистем. Предлагаемые
средства существенно упрощают создание точных и компактных представлений, независимо
от сложности исходной системы. Simulink также интегрируется с Stateflow для
моделирования поведения, вызванного событиями. Эти преимущества делают Simulink
наиболее популярным инструментом для проектирования систем управления и
коммуникации, цифровой обработки и других приложений моделирования.
Для построения блок-схем Simulink имеет обширную библиотеку блочных
компонентов и удобный редактор блок-схем, являющийся типичным средством
визуально-ориентированного программирования.
Программа Simulink является приложением к пакету MATLAB. Однако Simulink
является достаточно самостоятельным инструментом MATLAB и при работе с ним
совсем не требуется знать сам MATLAB и остальные его приложения. С другой
стороны, доступ к функциям MATLAB и другим его инструментам остается открытым и
их можно использовать в Simulink. Часть входящих в состав пакетов имеет
инструменты, встраиваемые в Simulink (например, LTI-Viewer приложения Control
System Toolbox-пакета для разработки систем управления). Имеются также
дополнительные библиотеки блоков для разных областей применения (например,
Power System Blockset - моделирование электротехнических устройств, Digital
Signal Processing Blockset - набор блоков для разработки цифровых устройств и
т.д). Simulink может использоваться, чтобы исследовать поведение широкого
диапазона практических динамических систем, включая электрические цепи,
амортизаторы, тормозные системы, и много других электрических, механических и
термодинамических систем.
При работе с Simulink пользователь имеет возможность модернизировать
библиотечные блоки, создавать свои собственные, а также составлять новые
библиотеки блоков.
При моделировании пользователь может выбирать метод решения
дифференциальных уравнений, а также способ изменения модельного времени (с фиксированным
или переменным шагом). В ходе моделирования имеется возможность следить за
процессами, происходящими в системе. Для этого используются специальные
устройства наблюдения, входящие в состав библиотеки Simulink. Результаты
моделирования могут быть представлены в виде графиков иди таблиц.
Преимущество Simulink заключается также в том, что он позволяет пополнять
библиотеки блоков с помощью подпрограмм, написанных как на языке MATLAB, так и
на языках С++, Fortran и Ada.
.2 Пакет Mathcad
Система MathCAD по праву называется современной универсальной массовой
математической системой для всех пользователей. Отличительной чертой
интегрированных математических систем MathCAD, разработчиком которых является
фирма MathSoft (США), является подготовка документов, в которых объединяются
задание исходных данных, математическое описание их обработки и результаты
вычислений в виде числовых данных, таблиц и графиков. В MathCAD удачно решена
проблема передачи изменений числовых данных по всей цепочке вычислений. Текст документа
MathCAD почти ничем не отличается от текста научных статей. Графическая среда
программы позволяет записывать математические формулы в привычном виде. С
появлением MathCAD студенты, аспиранты, инженеры и ученые получили в свои руки
превосходный инструмент для повседневной работы. Для обучения работе с системой
фирма MathSoft предлагает набор коротких примеров решения типовых
математических задач. Поэтому наряду с электронными книгами по расчетам
(BookSampler) и интерфейсу (Desktop Reference) и самоучителем (Tutorial)
MathCAD содержит множество коротких примеров - шпаргалок (QuickSheet).является
полноценным Windows-приложением со встроенными средствами обмена и поддерживает
технологию OLE. Этот пакет имеет естественный входной язык представления математических
зависимостей и инструменты для их набора. Система позволяет выполнять как
численные, так и аналитические (символьные) вычисления, имеет чрезвычайно
удобный математически интегрированный интерфейс и прекрасные средства научной
графики. Встроенный текстовый процессор позволяет оформить текст документа без
применения Word. Пользователь создает программу средствами текстового,
формульного и графического редактора, а система MathCAD сама составляет
программу, которая ранится в ОЗУ, до тех пор, пока не будет сохранена в файле с
расширением MCD или RTF. MathCAD предназначен, в частности, для проведения
расчетов:
Ø с действительными и комплексными числами;
Ø решения линейных и нелинейных уравнении и систем уравнений;
Ø упрощения, развертывания и группировки выражений;
Ø транспонирования, обращения матриц, вычисления определителя;
Ø построения двумерных и трехмерных графиков;
Ø оформления научно-технических текстов, содержащих сложные
формулы;
Ø дифференцирования и интегрирования, аналитического и
численного;
Ø проведения статистических расчетов и анализа данных.
Для моделирования динамических систем все выше перечисленные операции
крайне не обходимы в различных постановках задачи. Рассмотрим основные
возможности Mathcad.
Переменные и
константы
Здесь описаны допустимые имена переменных и функций Mathcad,
предопределенные переменные подобные , а также представления чисел. Mathcad
оперирует комплексными числами так же легко, как и вещественными. Переменные
Mathcad могут принимать комплексные значения, и большинство встроенных функций
определено для комплексных аргументов.
Именаразличает греческие и римские буквы.
Если использовать греческий символ вместо соответствующего римского в
имени переменной или функции, Mathcad воспримет его как другое имя.
Буквенные индексы
Если поместить точку в имени переменной, Mathcad отобразит всё следующее
за ней как нижний индекс. Можно использовать эти буквенные нижние индексы для
создания переменных с именами подобными velinit и uair .
Предопределённые переменныесодержит восемь переменных, значения которых
определены сразу после запуска программы. Эти переменные называются
предопределенными или встроенными переменными. Предопределенные переменные или
имеют общепринятое значение, подобно p и e, или используются как внутренние переменные,
управляющие работой Mathcad, подобно ORIGIN и TOL.
Числа
Этот раздел описывает различные типы чисел, используемых Mathcad, и
способы их записи в формулы.
Используемые числаинтерпретирует всё, начинающееся цифрой, как число.
Цифра может сопровождаться:
· другими цифрами,
· десятичной точкой,
· цифрами после десятичной точки,
· одной из букв h или o, для шестнадцатеричных и восьмеричных
чисел, i или j для комплексных чисел.
Векторы и
матрицы
Здесь описаны массивы в Mathcad. В то время как обычные переменные
(скаляры) хранят одиночное значение, массивы хранят много значений. Как обычно
принято в линейной алгебре, массивы, имеющие только один столбец, будут часто
называться векторами, все прочие - матрицами.
Переменные могут представлять массивы так же, как скаляры. Определение
переменной как массива во многом схоже с определением скаляра.
Нижние индексы и верхние индексы
Можно обращаться к отдельным элементам массива, используя нижние индексы.
Можно также обращаться к отдельному столбцу массива, используя верхний индекс.
Чтобы напечатать нижний индекс, используйте кнопки на панели инструментов.
Вектор и элементы матрицы обычно нумеруются, начиная с нулевой строки и
нулевого столбца.
Векторные и матричные операторы
Некоторые из операторов Mathcad имеют особые значения в применении к
векторам и матрицам. Например, символ умножения означает просто умножение,
когда применяется к двум числам, но он же означает скалярное произведение,
когда применяется к векторам, и умножение матриц.
Векторные и матричные функциисодержит функции для обычных в линейной
алгебре действий с массивами. Эти функции предназначены для использования с
векторами и матрицами. Если явно не указано, что функция определена для
векторного или матричного аргумента, не следует в ней использовать массивы как
аргумент.
Операторы
В Mathcad используются обычные операторы, подобные + и /, а также
операторы, определенные для матриц, например, операторы транспонирования и
нахождения детерминанта, и специальные операторы типа вычисления интегралов и
производных.
Встроенные
функции
Вставка встроенных функций
Чтобы вставить функцию в Mathcad, можно кликнуть на панели инструментов
Вставить ->Функция.
Трансцендентные функции
Этот раздел описывает тригонометрические, гиперболические и показательные
функции Mathcad вместе с обратными им.
Тригонометрические функции и обратные им. Тригонометрические функции
Mathcad и обратные им определены для любого комплексного аргумента. Они также
возвращают комплексные значения везде, где необходимо.
Вот некоторые из них: sin(z)- возвращает синус z, asin(z) - возвращает угол в радианах, чей синус z, sec(z)- возвращает 1/cos(z), секанс z.
Остальные тригонометрические функции определяются аналогично.
Гиперболические функции
Эти функции также могут использовать комплексный аргумент и возвращать
комплексные значения. Гиперболические функции тесно связаны с
тригонометрическими функциями.
Одна из них - sinh (z) - возвращает гиперболический синус z.
Логарифмические и показательные функции
Логарифмические и показательные функции Mathcad могут использовать
комплексный аргумент и возвращать комплексные значения: exp(z) -возвращает e в
степени z, ln(z) - возвращает натуральный логарифм z,(z) - возвращает логарифм
z по основанию 10.
Усечение и функции округления
Все эти функции извлекают какую-либо часть своего аргумента.
Функции Re, Im и arg извлекают соответствующую часть комплексного числа
(вещественная, мнимая, и когда z
представлен в форме r eiq).
Функции ceil и floor возвращают ближайшее целое число большее и меньшее
аргумента соответственно. Эти функции могут быть использованы для создания
функции, возвращающей дробную часть числа.
eiq).
Функции ceil и floor возвращают ближайшее целое число большее и меньшее
аргумента соответственно. Эти функции могут быть использованы для создания
функции, возвращающей дробную часть числа.
Функции сортировкисодержит три функции для сортировки массивов и одну для
обращения порядка их элементов:
sort(v) - возвращает элементы вектора v, отсортированные в порядке
возрастания.
Условные операторы
Обычно Mathcad выполняет операторы программы в порядке сверху вниз. Могут
встретиться случаи, в которых какой-нибудь оператор нужно выполнить только в
случае выполнения некоего условия. Этого можно добиться с помощью оператора “if
”.
Циклы
Одним из величайших преимуществ программирования является возможность
многократного выполнения некоторой последовательности операторов в цикле.
Mathcad предлагает два вида циклов, отличающихся по способу определения условия
завершения цикла.
· Если заранее точно известно необходимое число выполнений
цикла, то целесообразно использовать цикл типа for.
· Если цикл должен завершиться по выполнении некоторого
условия, причем момент выполнения этого условия заранее не известен, то
целесообразно использовать цикл типа while.
Решение
уравнений
Здесь описано, как при помощи Mathcad решать уравнения и системы
уравнений. Можно решать как одно уравнение с одним неизвестным, так и системы
уравнений с несколькими неизвестными. Максимальное число уравнений и
неизвестных в системе равно пятидесяти.
Решение одного уравнения
Для решения одного уравнения с одним неизвестным используется функция root(f(z), z) - возвращает значение z, при
котором выражение или функция f(z) обращается в 0.
Функция root предназначена для решения одного уравнения с одним
неизвестным.
Системы уравненийдает возможность решать также и системы уравнений.
Результатом решения системы будет численное значение искомого корня. Для
символьного решения уравнений необходимо использовать блоки символьного решения
уравнений. При символьном решении уравнений искомый корень выражается через
другие переменные и константы.
Find (z1, z2, z3, .
. .) - возвращает решение системы уравнений. Число аргументов должно быть равно
числу неизвестных.
Ключевое слово Given, стоящее вначале определения уравнения, сами
уравнения и неравенства, которые следуют за ним, и какое-либо выражение,
содержащее функцию Find, называются блоком решения уравнений.
Графики
Графики в Mathcad являются и универсальными, и легкими в использовании.
Чтобы создать график, щёлкните в месте, где нужно вставить график, выберите
Декартов график из меню Графика и заполните пустые поля. Можно всячески
форматировать графики, изменяя вид осей и начертания кривых и используя
различные метки.
Вставка графика
Чтобы вставить график в Mathcad, можно кликнуть на панели инструментов
«Графика».
Вообще графики строятся на основе имеющихся шаблонов. Первоначально
необходимо задать функцию графика.
Редактируются нижние, верхние, левые и правые границы графика. Если
нажать двойным щелчком левой кнопкой мыши на графике, то появится настройка
графика: осей координат, цвет, стиль вывода линий. Также можно задать диапазон
с шагом. Для параметрического задания функции диапазон обязателен.
Полярные
графики
В ряде случаев при построении графиков удобнее пользоваться полярными, а
не декартовыми координатами. Mathcad позволяет строить полярные графики.
Здесь также возможно редактирование графика и размещение нескольких
графиков в одной области.
Графики
поверхностей
В рабочие документы Mathcad можно включать наряду с двумерными и
трехмерные графики. В отличие от двумерных графиков, которые используют
дискретные аргументы и функции, трехмерные графики требуют матрицы значений.
Здесь показано, как можно матрицу представить в виде поверхности в трехмерном
пространстве. Также рассматривается создание, использование и форматирование
поверхностей в трехмерном пространстве.
.3 Сравнительный анализ
истема MatLab относится к среднему уровню продуктов, предназначенных для
символьной математики, но рассчитана на широкое применение в сфере CAE (то есть
сильна и в других областях). MatLab - одна из старейших, тщательно проработанных
и проверенных временем систем автоматизации математических расчетов,
построенная на расширенном представлении и применении матричных операций. Это
нашло отражение и в самом названии системы - MATrix LABoratory, то есть
матричная лаборатория. Однако синтаксис языка программирования системы продуман
настолько тщательно, что данная ориентация почти не ощущается теми
пользователями, которых не интересуют непосредственно матричные вычисления.
Несмотря на то что изначально MatLab предназначалась исключительно для
вычислений, в процессе эволюции к ней была подключена библиотека Simulink,
позволяющая построить логическую схему сложной системы управления из одних
только стандартных блоков, не написав при этом ни строчки кода. После
конструирования такой схемы можно детально проанализировать ее работу.
В системе MatLab также существуют широкие возможности для
программирования. Ее библиотека C Math (компилятор MatLab) является объектной и
содержит свыше 300 процедур обработки данных на языке C. Внутри пакета можно использовать
как процедуры самой MatLab, так и стандартные процедуры языка C, что делает
этот инструмент мощнейшим подспорьем при разработке приложений (используя
компилятор C Math, можно встраивать любые процедуры MatLab в готовые
приложения).
Для визуализации моделирования система MatLab имеет библиотеку Image
Processing Toolbox, которая обеспечивает широкий спектр функций, поддерживающих
визуализацию проводимых вычислений непосредственно из среды MatLab, увеличение
и анализ, а также возможность построения алгоритмов обработки изображений.
Таким образом, систему MatLab можно использовать для обработки
изображений, сконструировав собственные алгоритмы, которые будут работать с
массивами графики как с матрицами данных. Поскольку язык MatLab оптимизирован
для работы с матрицами, в результате обеспечивается простота использования,
высокая скорость и экономичность проведения операций над изображениями.
А что касается математических вычислений, то MatLab предоставляет доступ
к огромному количеству подпрограмм, содержащихся в библиотеке NAG Foundation
Library компании Numerical Algorithms Group Ltd (инструментарий имеет сотни
функций из различных областей математики, и многие из этих программ были
разработаны широко известными в мире специалистами). Это уникальная коллекция
реализаций современных численных методов компьютерной математики, созданных за
последние три десятка лет.
Из недостатков системы MatLab можно отметить невысокую интегрированность
среды (очень много окон, с которыми лучше работать на двух мониторах), не очень
внятную справочную систему (а между тем объем фирменной документации достигает
почти 5 тыс. страниц, что делает ее трудно обозримой) и специфический редактор
кода MatLab-программ.
В отличие от мощного и ориентированного на высокоэффективные вычисления
при анализе данных пакета MatLab, программа MathCad - это, скорее, простой, но
продвинутый редактор математических текстов с широкими возможностями символьных
вычислений и прекрасным интерфейсом.
Интерфейс программы MathCad очень простой, а возможности визуализации
богатые. Все вычисления здесь осуществляются на уровне визуальной записи
выражений в общеупотребительной математической форме.
Сегодня эта система стала буквально международным стандартом для
технических вычислений и даже многие школьники осваивают и используют MathCad.
Для небольшого объема вычислений MathCad идеален - здесь все можно
проделать очень быстро и эффективно, а затем оформить работу в привычном виде
(MathCad предоставляет широкие возможности для оформления результатов, вплоть до
публикации в Интернете).
В общем, MathCad - это очень простая и удобная программа, которую можно
рекомендовать широкому кругу пользователей, в том числе не очень сведущих в
математике, а особенно тем, кто только постигает ее азы.
Несмотря на то что в области компьютерной математики не наблюдается
такого разнообразия, как, скажем, в среде компьютерной графики, за видимой
ограниченностью рынка математических программ скрываются их поистине
безграничные возможности! Как правило, CAE-системы охватывают практически все
области математики и инженерных расчетов.
Когда-то системы символьной математики были ориентированы исключительно
на узкий круг профессионалов и работали на больших компьютерах (мэйнфреймах).
Но с появлением ПК эти системы были переработаны под них и доведены до уровня
массовых серийных программных систем.
. Алгоритмический анализ задачи
.1 Постановка задачи
С использованием системы MathCAD
.1 Рассчитать значение функций перемещения, скорости и ускорения
регистратора под воздействием начальных значений перемещения и скорости без
учета возмущающей силы, действующей на станину регистратора. Построить графики
этих функций;
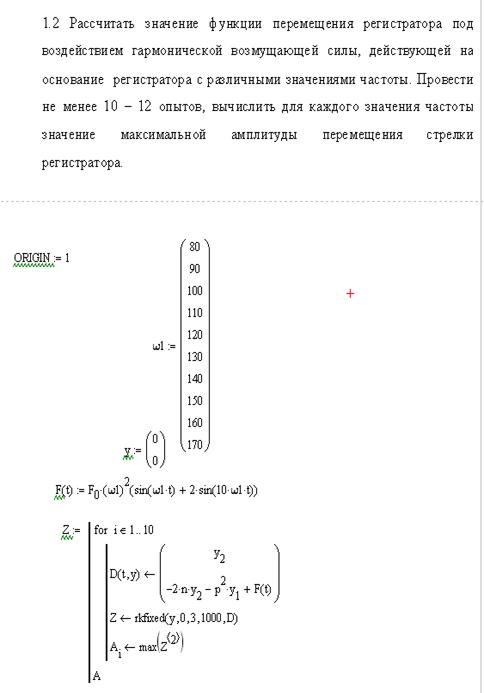
.2 Рассчитать значение функции перемещения регистратора под воздействием
гармонической возмущающей силы, действующей на основание регистратора с
различными значениями частоты. Провести не менее 10 - 12 опытов, вычислить для
каждого значения частоты значение максимальной амплитуды перемещения стрелки
регистратора.
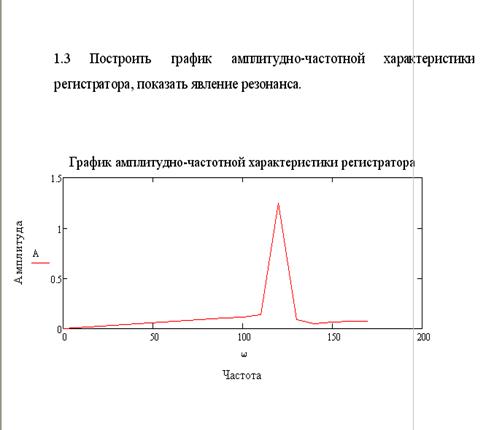
.3 Построить график амплитудно-частотной характеристики регистратора,
показать явление резонанса.
С использованием системы Matlab
Определить диапазон значений частоты, для которого максимальная амплитуда
колебаний больше порогового значения 0.02м
Исходные данные для курсовой работы
Исходными данными курсовой работы являются:
v с -жесткость пружины.
v m - масса груза.
v α - коэффициент демпфирования.
v F0 - амплитуда возмущающей силы.
v ω - частота возмущающей силы.
v Т - время исследования системы
Таблица 2.1-Таблица исходных данных:
|
с (КH/м)
|
m (кг)
|
ω
|
Α (H·c/м)
|
F0 (H)
|
tк (с)
|
с (КH/м)
|
|
7,5
|
9,0
|
80
|
25
|
0.02
|
5,1
|
7,5
|
Таблица 2.2-Таблица Используемых переменных:
|
Обозначение переменной
|
Назначение переменной
|
Описание переменной
|
|
D(t,y)
|
Промежуточные данные
|
Вектор функции первых производных
|
|
с
|
Исходные данные
|
Жесткость пружины
|
|
m
|
Исходные данные
|
Масса груза
|
|
ω
|
Исходные данные
|
частота возмущающей силы
|
|
α
|
Исходные данные
|
коэффициент демпфирования
|
|
Т
|
Исходные данные
|
Время исследование системы
|
|
Z
|
Результирующие данные
|
Матрица(1001строк)значение времени, перемещения, скорости
|
|
F0
|
Исходные данные
|
амплитуда возмущающей силы
|
.3 Описание математической модели
Рис 2.1- представлена механическая система с низкочастотными вибрографами
и демпферы вязкого трения
По условию задачи дана пружина жесткостью с, на которой подвешен груз
массой m. В процессе малых колебаний демпфируется силой движения груза, y - смещение массы относительно
основания.
Вынужденными называются колебания материальной точки, которые происходят
под действием внешней периодической силой.
Таким образом, исходное уравнение можно записать в виде:
 , (2.1)
, (2.1)
где
 , с - коэффициент упругости
, с - коэффициент упругости
 , n-
параметр сопротивления среды
, n-
параметр сопротивления среды
F(t)=F0∙ ω2(sin ωt + 2sin 10 ωt), F(t) -
возмущающая сила
Закон
имеет вид:
 (2.2)
(2.2)
здесь
 - амплитуда возмущающей силы
- амплитуда возмущающей силы
ω - частота возмущающей силы.
.4
Алгоритм расчёта базовой модели и проведения исследований
Да
Рисунок 2.2 - Графическая схема алгоритма
На данной графической схеме (рис. 2.4) представлено краткое описание
решения задачи в системе MathCAD.
Первым пунктом графической схемы является ввод исходных данных: m -масса груза;
m -
масса груза;
α - коэффициент демпфирования;
ω - частота возмущающей силы.
Далее записываем дифференциальное уравнение.
Следующим пунктом является решение дифференциального уравнения при
заданных начальных условиях. Строим графики перемещения, скорости и ускорения.
Изменяя величину частоты колебаний  проводим 10 опытов. Далее строим
сводный график зависимости минимума перемещения от массы.
проводим 10 опытов. Далее строим
сводный график зависимости минимума перемещения от массы.
Построив сводный график, необходимо указать явление резонанса.
Последним пунктом данной графической схемы является определение диапозона
значений частоты.
Графическая схема решения данной задачи приведена ниже.
matlab моделирование оператор матричный
. Описание реализации в пакете MathCAD
.1 Описание реализации базовой модели
Документ MathCAD приведён в
приложении A. В пакете MathCAD осуществляется следующее:
Задача 1.1
)Ввод исходных данных для решения задачи: с -жесткость пружины.- масса
груза;α
- коэффициент
демпфирования;
ω- частота возмущающей силы.
Числовые значения исходных данных каждого из параметров берутся из
п.2.2(согласно выданному 14-му варианту 2 задания на курсовую работу)
) Заданием вектора начальных условий у, вектора-функции, содержащего
производные D(t,y) без учета
возмущающей силы и решение системы дифференциальных уравнений с помощью функции
rkfixed при значениях граничных точек
интервала, на котором ищется решение дифференциальных уравнений от 0 до 5 в
1000 точках( не считая начальной точки), в которых ищется приближённое решение.
Результатом является матрица z
значений времени (столбец Z<1>),
перемещения(столбец Z<2>) и
скорости(столбец Z<3>),
содержащая 1001 строку(считая начальную точку)(см. Приложение А).
) Определениям (используя матрицу z) значении ускорения в 1001 точке(см. Приложение А).
) Построение графиков функций перемещения(см. приложение А рис.1.1),
скорости (см. приложение А рис.1.2) и ускорения (см. приложение А рис.1.3) в
зависимости от времени(см. Приложение А).
Задача 1.2
) Задаем матрицу ω1 (значения частоты) с 10 значениями
переменных.
) Задаем вектор начальных условий y, вектора-функции, содержащего производные D(t,y). Затем задаем
гармоническую возмущающую силу F(t).
) Затем задаем программный фрагмент
где,количество строк в матрице;
Ai-максимум i-ого элемента
функции перемещения
Задача 1.3
Строим график амплитудно-частотной характеристики регистратора, показывая
явление резонанса.
Задача 2.1
Документ Matlab приведён в
приложении Б. В пакете Matlab
осуществляется следующее:
) Из П.1.2 смотри приложение А полученные значения функции
перемещения заносим в текстовый документ ( file.txt) с
помощью команды WRITEPRN.
Затем вводим команду textread('r4.txt','%f %f %f'), где %f-считывает значения с запятыми.
) Считываем данные из файла с помощью команды load(‘имя файла, формат’).
) Задаем пороговое значение ниже которого результаты не
анализируются for i=1:length(A)
) Находим максимальную амплитуду колебаний больше порогового
значения 0.02м и соответствующую ей частоту:
A(i)>0.02A(i)>maximum=A(i)(i)
3.2 Выводы по результатам исследования
Основная часть приложения содержит вычисление функций перемещения,
скорости и ускорения системы в зависимости от времени, вычисление значение
функции перемещения регистратора под воздействием гармонической возмущающей
силы, действующей на основание регистратора с различными значениями частоты
аналитической аппроксимирующей функции по результатам исследований. Данные
зависимости были вычислены и были представлены в виде графиков и таблиц.
Целью проведения опытов было исследовать изменение усилия груза при возвратно-поступательном
движении. По результатам опытов построены графики.
Было проведено 10 опытов, в которых величина частоты колебаний изменилась
от 80 до 170, по результатам опытов были вычислены для каждого значения частоты
значение максимальной амплитуды перемещения стрелки регистратора.
Построен график зависимости амплитудно-частотной характеристики
регистратора, показано явление резонанса.
Таким образом, можно сделать вывод, что с увеличением частоты
увеличивается амплитуда колебаний.
Заключение
Мы рассмотрели только частные случаи решения задачи. Исходную функцию,
достаточно сложно решить в общем виде, без использования ЭВМ, или численных
методов решения задачи. Но, уже по частным случаям решений, можно увидеть
некоторую закономерность, на основании которых, уже можно делать какие-то
выводы.
Сам процесс изменения усилия при движении груза совершающее
возвратно-поступательное движение достаточно сложный физический процесс,
описывающий вынужденные колебания механической системы. Для численных решений системы
и построения графиков были взяты реальная масса, что позволило как можно больше
приблизить рассмотренный процесс к реальному.
Список используемых источников
1. Тарасик
В.П. “Математическое моделирование технических систем”. Мн. 1997г.
. С.П. Семенов,
В.В. Славский, П.Б. Татаринцев. Системы компьютерной математики. Учебное
пособие для студентов математического факультета АГУ/Барнаул:. Изд-во Алт.
ун-та, 2004.- 5 с.
. Бенькович
Е. С., Колесов Ю. Б., Сениченков Ю. Б. Практическое моделирование динамических
систем 2002
4.
<#"700095.files/image010.jpg">

Приложение Б
Исследование модели регистратора колебательных процессов с применением
СКМ в Matlab
Текст программы:
%z=textread('file.txt','%f %f
%f');=load('file.txt');=z(:,2);w=z(:,1);=0.02;i=1:length(A)A(i)>0.02A(i)>maximum=A(i)(i)
Результат:=
.0404=
.0204=
.0597=
.0255=
.0629=
.0306=
.0728=
.0612