Первичный преобразователь поперечных перемещений на базе многомодовых волоконных моносветоводов
Введение
Современная информационно-измерительная техника
располагает средствами измерения около двухсот различных физических величин -
электрических, магнитных, тепловых, акустических, механических и т.д.
Подавляющее большинство этих величин в процессе измерения преобразуется в
величины электрические, как наиболее удобные для передачи, усиления,
математической обработки и точности измерения. Поэтому в современной
измерительной технике находят широкое применение преобразователи разного рода
физических величин в электрические величины.
Измерительное преобразование представляет собой
отражение размера одной физической величины размером другой физической
величины, функционально с ней связанной.
Применение измерительных преобразований является
единственным методом практического построения любых измерительных устройств.
Измерительный преобразователь - это техническое
устройство, построенное на определенном физическом принципе действия,
выполняющее одно частное измерительное преобразование. Работа измерительных преобразователей
протекает в сложных условиях, так как объект измерения - это, как правило,
сложный, многогранный процесс, характеризующийся множеством параметров, каждый
из которых действует на измерительный преобразователь совместно с остальными
параметрами.
Целью курсового задания является приобретение
навыков самостоятельного применения в исследованиях и расчетах знаний по курсу
«Приборы и методы визуального и оптического контроля».
1. Анализ исходных данных
Необходимо разработать первичный преобразователь
поперечных перемещений на базе многомодовых волоконных моносветоводов.
Исходные данные:
Параметры световодов.
. Диаметр световедущей сердцевины - 50 мкм. NA=0,2.
. Диаметр световедущей сердцевины - 400 мкм. NA=0,2.
Источник - светодиод АЛ-107 Б.
Необходимо рассмотреть два случая.
Для увеличения точности измерений требуется
обеспечить соосность световодов.
2. Анализ существующих методов и средств
контроля линейных перемещений
Существует множество различных методов и средств
измерения линейных перемещений. Все они делятся на два больших класса:
контактные и бесконтактные. Бесконтактные методы подразделяются по способу
регистрации измерительной информации на амплитудные, фазовые и частотные. В
настоящее время используют следующие способы измерений линейных перемещений:
дифракционные, интерференционные, основанные на методах геометрической оптики.
Основной областью применения интерференционных
методов является точное позиционирование, измерение деформаций, перемещений и
вибраций.
Приборы, основанные на явлении дифракции,
используются в машиностроении для измерения зазоров и диаметра изделий малого
сечения.
К методам, основанным на методах геометрической
оптики, относят измерения на принципе триагуляции, т.е. расстояние вычисляется
по углу между испускаемым и отраженным от объекта лазерными лучами.
Использование этих методов позволяет производить
контроль с точностью до сотых долей микрона в диапазоне измерений до нескольких
метров.
Рассмотрим контактные методы. Для измерения
линейных и угловых перемещений служат реостатные преобразователи, емкостные
преобразователи, индуктивные преобразователи и опто-волоконные преобразователи.
Опишем каждый тип преобразователей в отдельности.
Реостатные преобразователи.
Реостатные преобразователи основаны на изменении
электрического сопротивления проводника под влиянием входной величины -
перемещения. Реостатный преобразователь представляет собой в простейшем случае
реостат, движок которого перемещается под воздействием измеряемой
неэлектрической величины.
Габариты преобразователя определяются значением
измеряемого перемещения, сопротивлением обмотки и мощностью, выделяемой в
обмотке.
Для получения нелинейной функции преобразования
применяются функциональные реостатные преобразователи. Нужный характер функции
преобразования очень часто достигается профилированием каркаса преобразователя.
Выходной параметр реостатных преобразователей -
сопротивление.
К достоинствам реостатных преобразователей
относится возможность получения высокой точности, значительных по уровню
выходных сигналов и относительная простота конструкции. Недостатки - наличие
скользящего контакта, необходимость относительно больших перемещений движка, а
иногда и значительного усилия для его перемещения.
Индуктивные преобразователи.
Принцип действия преобразователей основан на
зависимости индуктивности или взаимной индуктивности обмоток на магнитопроводе
от положения, геометрических размеров и магнитного состояния элементов их
магнитной цепи.
Применяются также индуктивные дифференциальные
преобразователи трансформаторного типа, в которых две секции первичной обмотки
включены согласно, а две секции вторичной обмотки - встречно. При питании
первичной обмотки переменным током и при симметричном положении якоря
относительно электромагнитов ЭДС на выходных зажимах равна нулю. При
перемещении якоря возникает сигнал на выходных зажимах. Это так называемы LDTV-датчики.
Аббревиатура LVDT образована от словосочетания
Linear Variable Differential Transformer - линейный дифференциальный
трансформатор с переменным коэффициентом передачи. LVDT-датчики -
электромеханический преобразователь, преобразующий прямолинейное перемещение
объекта, с которым он связан механически, в электрический сигнал. К
отличительным особенностям рассматриваемых датчиков можно причислить очень
большой динамический диапазон измеряемых перемещений (от десятков микрон до
±0,5 м) и возможность работать в самых жестких условиях эксплуатации. Первое
следует из принципа действия, а второе - из конструктивного исполнения.
Существует довольно много импульсных датчиков перемещения,
принцип действия которых основан на регистрации момента пересечения (с помощью
магнитных или оптронных датчиков) движущимся объектом определенной метки. При
наступлении указанного события на выходе датчика генерируется импульс. Подобные
устройства по понятным причинам имеют не только ограниченный динамический
диапазон измерений перемещений, но и увеличивают ошибку вычисления скорости и
ускорения (первая и вторая производная от перемещения), что не всегда является
приемлемым. LVDT-датчики, в силу того что их выходной сигнал непрерывен, лишены
отмеченных недостатков.
Для преобразования сравнительно больших
перемещений (до 50-100 мм) применяются индуктивные преобразователи с
незамкнутой магнитной цепью.
Индуктивные преобразователи используются для преобразования
перемещения и других неэлектрических величин, которые могут быть преобразованы
в перемещение (усилие, давление, момент и т. д.).
По сравнению с другими преобразователями
перемещения индуктивные преобразователи отличаются значительными по мощности
выходными сигналами, простотой и надежностью в работе.
Недостатком их является наличие обратного
воздействия преобразователя на измеряемый объект (воздействие электромагнита на
якорь) и влияние инерции якоря на частотную характеристику прибора.
Емкостные преобразователи.
Емкостные преобразователи основаны на
зависимости электрической емкости конденсатора от размеров, взаимного
расположения его обкладок и от диэлектрической проницаемости среды между ними.
Такие преобразователи используются для измерения
малых перемещений (менее 1 мм).
Малое рабочее перемещение пластин приводит к
появлению погрешности от изменения расстояния между пластинами при колебаниях
температуры. Соответствующим выбором размеров деталей преобразователя и
материалов эту погрешность можно значительно снизить.
Применяются также дифференциальные
преобразователи, у которых имеется одна подвижная и две неподвижные пластины.
При воздействии измеряемой величины Х у этих преобразователей одновременно
изменяются емкости С1и С2.
В этих преобразователях легко получить требуемый
характер функции преобразования путем профилирования пластин.
Достоинства емкостных преобразователей -
простота устройства, высокая чувствительность и возможность получения малой
инерционности преобразователя.
Недостатки - влияние внешних электрических
полей, паразитных емкостей, температуры, влажности, относительная сложность
схем включения и необходимость в специальных источниках питания повышенной
частоты.
Оптоволоконные преобразователи
Современные волоконно-оптические датчики
позволяют измерять почти все. Например, давление, температуру, расстояние,
положение в пространстве, скорость вращения, линейное перемещение, ускорение,
колебания, массу, звуковые волны, уровень жидкости, деформацию, коэффициент
преломления. электрическое поле, электрический ток, магнитное поле,
концентрацию газа, дозу радиационного излучения и т. д.
Волоконно-оптические преобразователи основаны на
зависимости потока излучения, проходящего через оптоволокно, от перемещения.
Характеристики оптического волокна как
структурного элемента датчика и систем связи. Отметим общие достоинства
оптических волокон: широкополосность (предполагается до нескольких десятков
терагерц), малые потери (минимальные 0,154 дБ/км), малый (около 125 мкм)
диаметр, малая (приблизительно 30 г/км) масса, эластичность (минимальный радиус
изгиба 2 мм), механическая прочность (выдерживает нагрузку на разрыв примерно 7
кг), отсутствие взаимной интерференции, безиндукционность (практически
отсутствует влияние электромагнитной индукции).
В практике использования волоконно-оптических
датчиков имеют наибольшее значение последние четыре свойства. Достаточно
полезны и такие свойства, как эластичность, малые диаметр и масса.
Широкополосность же и малые потери значительно повышают возможности оптических
волокон. Однако, с современной точки зрения, по мере расширения функциональных
возможностей волоконно-оптических датчиков в ближайшем будущем эта ситуация
понемногу исправится.
В волоконно-оптических датчиках оптическое
волокно может быть применено просто в качестве линии передачи, а может играть
роль самого чувствительного элемента датчика.
При разработке первичного преобразователя для
измерения продольного перемещения будем использовать контактный метод
измерения, а в частности волоконно - оптический преобразователь. Т.к. при
помощи волоконно - оптического преобразователя возможно получение высокой
точности и значительных по уровню выходных сигналов. Главным достоинством
такого преобразователя является относительная простота конструкции. /2/
3. Разработка оптико-механической схемы
.1 Расчет параметров оптической системы
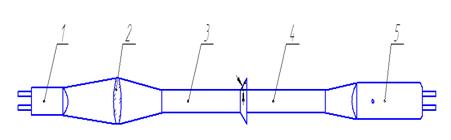
Рисунок 3.1-Схема оптической системы.
где - 1(АЛ-107 Б), линза 2, неподвижный световод
3, подвижный световод 4 и фотоприемник 5 (ФД-256).
Для оптимального ввода излучения
необходимо, чтобы диаметр излучающей поверхности был равен диметру световода.
Для обеспечения этого условия выбираем линзу с минимальным фокусным расстоянием
и максимальным диаметром. Линза марки 01 LDX 401,
фокусное расстояние  , диаметр
, диаметр  .
.
Из оптики известно, что поперечное
увеличение в линзе определяется формулой
оптический система преобразователь
излучение
 , (3.1)
, (3.1)
а расстояние от переднего фокуса до
предмета  и от заднего фокуса до изображения
и от заднего фокуса до изображения  подчиняются соотношению
подчиняются соотношению
 (3.2)
(3.2)
Тогда из условия

 .
.
Решая систему из двух уравнений,
получаем  ,
,  .
.
Значит расстояние от светодиода до
линзы равно 15,75 мм, а расстояние от линзы до световода равно 6,3 мм.
Расстояние от конца подвижного
световода до фотодиода  вычисляется следующим образом. Из
условия известно, что NA=0,2, следовательно, апертура
световода
вычисляется следующим образом. Из
условия известно, что NA=0,2, следовательно, апертура
световода  , а диаметр фотодиода равен 4 мм.
Тогда
, а диаметр фотодиода равен 4 мм.
Тогда  .
.
Для световода с диаметром сердцевины
50 мкм примем те же самые расстояния, но при этом в дальнейшем учтем потери.
Светодиод АЛ 107 Б (поз. 20)
(01.00.000 СБ) закреплен в корпусе цилиндрической формы (поз. 17) винтом М2х1
ОСТ92-0739-72 (поз. 22). Линза 01 LDX 401 (поз.
19) так же зафиксирована в корпусе гайкой М4х1 ОСТ92-4714-86 (поз. 18). Деталь
цилиндрической формы (поз. 16) вкручивается в корпус (поз. 17). Все концы
световодов (поз. 1) вклеены в оправку (поз. 30). Начало первого световода
закрепляется в детали (поз. 16) посредством накидной гайки М8х0,75 (поз. 25).
Другой конец световода закреплен в стойке (поз. 2) посредством втулки (поз. 6).
Фиксация световода осуществляется накидной гайкой (поз. 25). Стойка закреплена
на подставке параллелепипидной формы (поз. 5), которая обеспечивает
устойчивость, винтами М3х1,75 ГОСТ 17450-80 (поз. 15). Подставка закреплена на
металлической плите (поз. 3) винтами М3х1,75 ГОСТ 17450-80 (поз. 28).
Другой световод так же закреплен во
втулке (поз. 8), зафиксирован накидной гайкой. Втулка ввинчивается в подвижную
часть устройства «ласточкин хвост» (поз. 7). Ходовая часть устройства закреплена
посредством пластин (поз. 12, 13, 14), которые фиксируются винтами М4х2 ГОСТ
17450-80 (поз. 11). В подвижную часть вкручиваться винт М2,5х0,8 ГОСТ 10344-80
(поз. 4), обеспечивающий поперечные перемещения. Фиксация винта обеспечивается
подкладкой (поз. 26), которая крепится к пластинам винтами М1х0,4 ГОСТ 17473-80
(поз. 27). «Ласточки хвост» закреплен на подставке параллелепипидной формы
(поз. 9) винтами М3х1,75 ГОСТ 17475-80 (поз. 10), которая в свою очередь
привинчена к рабочей поверхности винтами М3х1,75 ГОСТ 17475-80 (поз. 29).
Конец второго световода фиксируется
накидной гайкой в цилиндрическом корпусе (поз. 23), в котором закреплен
фотодиод ФД 256 (поз. 21) винтом М2х1 ОСТ92-0739-72 (поз. 22).
Корпуса (поз.16, 23) крепятся в
стенке прибора по средствам винтов М2 ОСТ 92-0728-72 (поз. 24).
.3 Описание установки в динамике
Пучок света от источника излучения
попадает на линзу. Оптическая система направляет поток на неподвижный световод.
Второй световод, расположенный на расстоянии 0, 100 мкм или 1000 мкм,
перемещается поперечно и в него попадает часть светового потока. Поток,
пройдя второй световод, попадает на фотодиод.
4. Расчет градуированных
характеристик I(y)
.1 Расчет интегральной
чувствительности
Из справочника /1/ определим
интегральную чувствительность  фотодиода ФД-256. Она равна
фотодиода ФД-256. Она равна  . Так как интегральная
чувствительность фотоприемника известна в энергетических фотометрических
единицах, то ток фотодиода можно определить по следующей формуле:
. Так как интегральная
чувствительность фотоприемника известна в энергетических фотометрических
единицах, то ток фотодиода можно определить по следующей формуле:
 (4.1)
(4.1)
где  - поток излучения, попадающий на
фотоприемник.
- поток излучения, попадающий на
фотоприемник.
Для расчета интегралов используем
данные для спектральной плотности потока излучения эталонного источника,
спектральной чувствительности фотоприемника и кривой видности, приведенные в
таблицах Б.1 и В.1. /1/
Спектральную плотность потока
излучения источника рассчитаем с шагом  0,1 мкм (таблица 3. /2/ ).
0,1 мкм (таблица 3. /2/ ).
Для вычисления интегралов будем
использовать геометрическое интегрирование с использованием ступенчатой
аппроксимации подинтегральных функций на каждом из промежутков. Для удобства
значение функций будем брать не посредине промежутка, а на его левой границе.
Для вычисления интеграла  разобьем весь диапазон длин волн на
промежутки
разобьем весь диапазон длин волн на
промежутки  . Тогда искомый интеграл будет
равен:
. Тогда искомый интеграл будет
равен:

Отсюда:
 (4.2)
(4.2)
Для вычисления интеграла  весь диапазон длин волн разобьем на
промежутки
весь диапазон длин волн разобьем на
промежутки  . Тогда искомый интеграл будет
равен:
. Тогда искомый интеграл будет
равен:

 (4.3)
(4.3)
Далее
 , т.к. источник излучения обладает
линейчатым спектром.
, т.к. источник излучения обладает
линейчатым спектром.
Следовательно
 (4.4)
(4.4)
.2 Расчет потерь излучения в
оптической системе
Так как поток излучения зависит от
поперечного перемещения световода, то рассчитаем  .
.
Для этого нам понадобиться
рассчитать потери в оптической системе.
 ,
(4.5)
,
(4.5)
где t1 - потери на оптических
элементах, появляющихся в связи с Френелевскими потерями, t1=0,96 на каждый переход из
одной оптической среды в другую,
t2
- потери в среде, где распространяется излучение, в воздухе t4 = 1,
 - потери, возникающие при вводе
светового потока из линзы в световод.
- потери, возникающие при вводе
светового потока из линзы в световод.
Для 50 мкм световода 
Для 400 мкм световода 
Следовательно
Для 50 мкм световода

Для 400 мкм световода

Мощность светодиода 10 Вт,
следовательно  . Потери в оптической системе
составляют 70%, таким образом на торец световода попадет поток излучения равный:
. Потери в оптической системе
составляют 70%, таким образом на торец световода попадет поток излучения равный:
 (4.6)
(4.6)
В случае со световодом с диаметром световедущей
сердцевины 50 мкм потери составят 89%:
 (4.7)
(4.7)
Поток излучения  , попадающий на торец подвижного
световода, определяется по формуле:
, попадающий на торец подвижного
световода, определяется по формуле:
 (4.8)
(4.8)
где  - энергетическая освещенность,
- энергетическая освещенность,
S - площадь
части торца световода, на которую попадает пучок света.
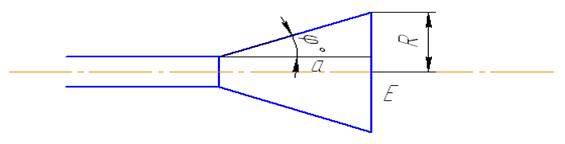
Рисунок 4.1 - Схема расчета
освещенности
Освещенность рассчитывается следующим образом:
 (4.9)
(4.9)
где  - площадь сечения светового пучка
на определенном расстоянии a.
- площадь сечения светового пучка
на определенном расстоянии a.
Как видно из рисунка 4.1 площадь зависит от расстояния а, диаметра
первоначального пучка света, а также угла рассеивания φ. Зная
числовую апертуру световода NA=0,2, определим угол φ:
 (4.10)
(4.10)
Получив угол, геометрически найдем
радиус полученного сечения:
 (4.11)
(4.11)
 (4.12)
(4.12)
где  - радиус световода 0,05 мм и 0,4 мм
с первым и вторым световодом соответственно.
- радиус световода 0,05 мм и 0,4 мм
с первым и вторым световодом соответственно.
Зная, что  находим освещенность
находим освещенность  :
:
 (4.13)
(4.13)
 (4.14)
(4.14)
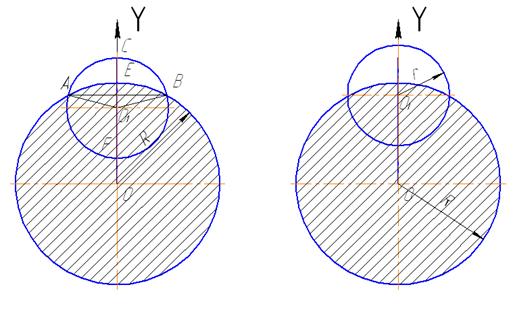
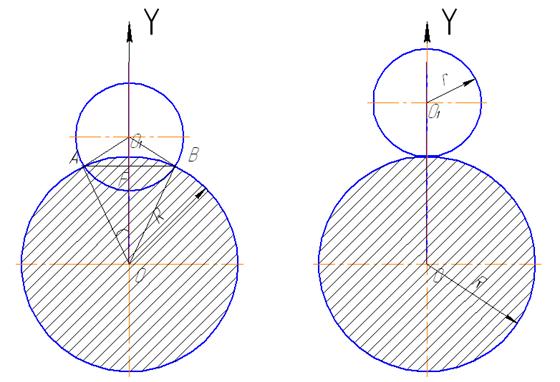
Следующая наша задача определить
площадь засвеченной части торца второго световода S. Так как
световод поперечно перемещается, то выберем ось y и определим
 . Начало отсчета будет производиться
с точки пересечения горизонтальной оси неподвижного световода с сечением
светового пучка на расстоянии а. Рассмотрим три случая:
. Начало отсчета будет производиться
с точки пересечения горизонтальной оси неподвижного световода с сечением
светового пучка на расстоянии а. Рассмотрим три случая:

а) б)
Рисунок 4.2 - Схема, поясняющая промежуточные
положения торца световода в 1-ом случае.
Как видно из рисунка, на этом
интервале торец засвечен полностью и поэтому 
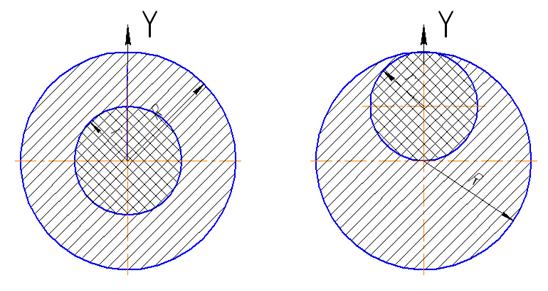
2) 
а) б)
Рисунок 4.3 - Схема, поясняющая
промежуточные положения торца световода во 2-ом случае.
 (4.15)
(4.15)
Площадь сегмента АЕB
определяется по следующей формуле:
 (4.16)
(4.16)
Неизвестным в этом выражении
является . Для ее нахождения рассмотрим
треугольник
. Для ее нахождения рассмотрим
треугольник  (рисунок 4.4)
(рисунок 4.4)
Рисунок 4.4 - Схема, поясняющая
геометрический расчет углов.
Четко видно, что отрезок ОО1 является
изменяющимся y. Так как нам
известны все стороны треугольника определим угол по теореме косинусов:
 (4.17)
(4.17)
Подставив формулу 4.16 в 4.15, получим:
 (4.18)
(4.18)
Площадь  состоит из разности:
состоит из разности:
 (4.19)
(4.19)
Площадь  определяется аналогично
определяется аналогично  :
:
 (4.20)
(4.20)
Чтобы найти угол  , проведем в треугольнике ОАО1
высоту АL.
Треугольник ОLА является
прямоугольным. Зная R, r и угол
, проведем в треугольнике ОАО1
высоту АL.
Треугольник ОLА является
прямоугольным. Зная R, r и угол  , находим :
, находим :
 (4.21)
(4.21)
Следовательно:
 (4.22)
(4.22)
Подставляя формулы (4.17) и (4.21) в
(4.14) находится функция зависимости  для второго случая. Эта функция
является действительной до значения
для второго случая. Эта функция
является действительной до значения  (определяется из рисунка 4.3 б),
так как после него угол будет превышать
(определяется из рисунка 4.3 б),
так как после него угол будет превышать  и формула (4.21) будет не верна.
и формула (4.21) будет не верна.
3) 
Как видно из рисунка 4.5 а площадь засвеченной
части определяется суммой:
 (4.23)
(4.23)
Рассчитаем первое слагаемое:
 (4.24)
(4.24)
а) б)
Рисунок 4.5 - Схема, поясняющая
промежуточные положения торца световода в 3-ем случае.
Угол находим исходя из теоремы
косинусов:
 (4.25)
(4.25)
Подставим это выражение в формулу
(4.24):
 (4.26)
(4.26)
Площадь  рассчитывается абсолютно
аналогично, как и площадь
рассчитывается абсолютно
аналогично, как и площадь  так как ее формула может быть
использована и в этом диапазоне изменения y.
так как ее формула может быть
использована и в этом диапазоне изменения y.
Используя эти формулы, находим
функцию  .
.
Подставив функции в соответствии с интервалами y и формулу
(4.13) в формулу (4.9) получаем систему уравнений:
Для 50 мкм
 (4.27)
(4.27)
Для 400 мкм
 (4.28)
(4.28)
Следовательно:
Для 50 мкм
 (4.29)
(4.29)
Для 400 мкм
 (4.30)
(4.30)
Следует отметить, что при расчетах мы не
учитывали перемещение световода в противоположную сторону. Но, обращая внимание
на то, что модель симметрична, эти расчеты можно опустить.
Расчеты поставленной задачи в работе
производились с использованием программы MathCAD 2001 Professional. Поэтому
изменяя значения параметра можно построить график зависимости  как на расстоянии между световодами
как на расстоянии между световодами
 .
.
.3 Расчет чувствительности
Пользуясь графиком зависимости для случая  , рассчитаем чувствительность
, рассчитаем чувствительность  . Для этого разобьем произвольно
значения функции на интервалы
. Для этого разобьем произвольно
значения функции на интервалы  и найдем соответствующие значения
и найдем соответствующие значения  . Возьмем три интервала, так как
график не линеен (рис.4.6). Чувствительность определяется по формуле:
. Возьмем три интервала, так как
график не линеен (рис.4.6). Чувствительность определяется по формуле:
 (4.31)
(4.31)
Находим:



Рисунок 4.6 - График зависимости
фототока на расстоянии между световода 0.1
мм.
Проанализировав полученные значения, можно
сделать вывод, что при удалении световода от первоначального положения,
чувствительность уменьшается. Следовательно, точность измерений также
уменьшается.
Рассчитаем рабочий диапазон преобразователя:
Максимальный ток будет при х=0.
 . Tак как сила тока в интервале от 0
до
. Tак как сила тока в интервале от 0
до  не изменяется, то рабочий диапазон
будет от
не изменяется, то рабочий диапазон
будет от  до значения
до значения  , при котором сила тока будет равна
, при котором сила тока будет равна  .
.
Таким образом, рабочий диапазон для
400 мкм световода от 0,025 до 0,4 мм, а для 50 мкм световода от 0 до 0,05 мм.
Заключение
Мною был разработан первичный преобразователь
для измерения поперечных перемещений. Разработанная установка имеет малые
габариты и вес. Рабочий диапазон для 400 мкм световода от 0,025 до 0,4 мм, а
для 50 мкм световода от 0 до 0,05 мм. Судя по графикам показанных в
приложениях, можно сделать вывод, что при увеличении расстояния между
световодами увеличивается рабочий диапазон, но уменьшается точность измерений.
Список использованных источников
1
Конюхов Н. Е. Измерительные преобразователи. Курс лекций. - Куйбышев, 1972. -
260с.;ил.
Левшина
Е.С. Электрические измерения физических величин. Измерительные преобразователи
/ Е.С. Левшина, П.В. Новицкий. Л.: Энергоатомиздат, 1983. 390с.
Методы
и средства неразрушающего контроля качества: Учеб. Пособие / И.Н. Ермолов, Ю.Я.
Останин. М.:Высш. шк.,1988. 368с.; ил.
Приборы
для неразрушающего контроля материалов и изделий: Справ.Т. 1 / Под фед В.В.
Клюева. М.: Машиностроение, 1986. 488с.; ил.
Приложение А
(обязательное)
Графики зависимости для 400 мкм световода
Рисунок 2 - График зависимости
фототока на расстоянии между световодами 100
мкм
Рисунок 3 - График зависимости фототока
на расстоянии между световодами
1000 мкм
Приложение Б
(обязательное)
Графики зависимости для 50 мкм
световода
Рисунок 1 - График зависимости
фототока на расстоянии между световодами