|
Температура,
°С
|
Сопротивление,
Ом
|
|
-50
|
41,71
|
|
-30
|
46,23
|
|
-10
|
50,74
|
|
0
|
53,00
|
|
20
|
57,52
|
|
40
|
62,03
|
|
60
|
66,55
|
|
80
|
71,06
|
|
100
|
75,58
|
|
120
|
80,09
|
|
140
|
84,61
|
|
160
|
89,61
|
Т.к измеряемый диапазон измерения температуры
датчика от -50 до 100°С, то можем определить максимальное и минимальное
сопротивление.
При T=
-50°С R=41,71 Ом;
При T=100°С
R=75,58 Ом;
Найдем передаточную функцию датчика:
W(p)=
U/T;(11)
Таким образом W(p)= ; (13)
; (13)
I= =12В/75,58
Ом=0,16 А(14)
=12В/75,58
Ом=0,16 А(14)
 = α для терморезисторов; (15)
= α для терморезисторов; (15)
W(p)==0,16*4,3*10-3
=0,68*10-3
.4 Усилитель мощности ЭУ3-П
Выбираем электронный усилитель типа
ЭУ3-П. Усилители данного типа чаще всего применяются в измерительных
комплектах: термопара, компенсационный мост с усилителем или автоматический
потенциометр.
Передаточная функция звена имеет
вид:
 (16)
(16)
где Ку -коэффициент
усиления электронного усилителя.
Ку =Uвых/Uвх=220/12=18
Подставляем известный коэффициент в
формулу получим передаточная функция электронного усилителя имеет вид:
Wy(p)=18;
3. ДЕЛЕНИЕ ЛСУ НА ИЗМЕНЯЕМУЮ И НЕИЗМЕНЯЕМУЮ
ЧАСТИ. ОПРЕДЕЛЕНИЕ УСТОЙЧИВОСТИ
К неизменяемой части относят все элементы
регулятора с передаточной функцией отличной от единицы. Следовательно, к ним
можно отнести все элементы кроме микропроцессора.
Определим передаточную функцию системы,
передаточная функция главной цепи будет:
 .(17)
.(17)
Передаточная функция разомкнутой
системы будет:
 .18)
.18)
Передаточная функция замкнутой системы:
 .(19)
.(19)
По выражению (18) построим АФЧХ
разомкнутой системы, изображенную на рисунке 2:
Рисунок 2 - АФЧХ разомкнутой системы
Согласно критерию Найквиста, замкнутая
автоматическая система регулирования будет устойчивой, если АФХ разомкнутой
системы не охватывает точку с координатами -1,j0 ,таким образом, имеем
устойчивую систему с неограниченно большими запасами по амплитуде и фазе [3].
4. ПОСТРОЕНИЕ ЛОГАРИФМИЧЕСКИХ ХАРАКТЕРИСТИК И ИХ
анализ
.1 Построение ЛАЧX
Разомкнутая система образована двумя,
соединенными последовательно, апериодическими звеньями, для которых частоты
среза будут:
ω1=1/T1=2.67
рад/c,
ω1=1/T1=37.32
рад/c.
По выражению (18) построим ЛАЧХ и ЛФЧХ - рисунок
3, разомкнутой системы, а по выражению (19) построим переходный процесс в
замкнутой системе - рисунок 4:
Рисунок 3 - ЛАЧХ и ЛФЧХ разомкнутой системы
Рисунок 4 - Переходный процесс в замкнутой
системе
Прямые оценки качества переходной
характеристики:
. Время регулирования tp=600 c;
Можно сделать вывод, что система является
устойчивой с неограниченно большими запасами по амплитуде и фазе, но
характеристики переходного процесса системы не удовлетворяют заданным. То есть,
необходима коррекция системы.
.2 Построение ЖЛАЧХ
Для начала определим частоты сопряжения для
цифровой системы. Аппроксимировать ЛАЧХ можно двумя методами: непосредственная
аппроксимация графика ЛАЧХ или нахождение частот сопряжения из передаточной
функции системы. Проведем достаточно точную аппроксимацию исходной ЛАЧХ (рис.
3).
Теперь воспользуемся методом синтеза ЖЛАЧХ,
используя номограмму Солодовникова (рис. 4).
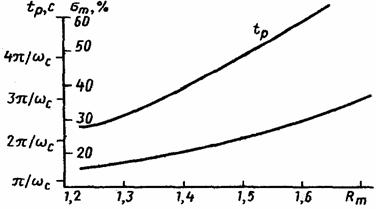
Рисунок 5 - Номограмма Солодовникова
Запретная зона строится исходя из скоростных
характеристик цифровой системы, которые заданны в техническом задании.
Определим положение рабочей точки.
Псевдочастота рабочей точки
 ;
;
Амплитуда рабочей точки
 ;
;
Найдем логарифмическую А: 20log(A)=-25.6 дБ;
Т.о., РТ(4; -25.6) - координаты рабочей точки.
Зададим время регулирование tp=10 c и
величину перерегулирования σ=30%,колебательности
(М=1.3), тогда, согласно номограмме Солодовникова, Рмах составит
1.27, а частоту среза найдем из формулы:


Таким образом, ωср=1.1 рад/с.
Определим ограничивающие асимптоты:
 =20lg(
=20lg( )=-4.68;
)=-4.68;
 =20lg(
=20lg( )=10.88;
)=10.88;
Необходимо провести прямую с
наклоном 20 дБ/дек, через частоту среза до пересечения с ограничивающими
асимптотами. В логарифмическом масштабе (4;-25.6). Через эту точку проводим
низкочастотную асимптоту с наклоном минус 20 дБ/дек. За пределами полосы,
ограниченной заданной колебательностью, ЖЛАЧХ совпадает по наклону с
низкочастотной частью построенной ЛАЧХ. Правее  ЖЛАЧХ идёт с наклоном параллельно
построенной ранее ЛАЧХ.
Исходную
ЛАЧХ и ЖЛАЧХ разомкнутой системы, построенную методом Солодовникова изобразим
на рисунке 6.
ЖЛАЧХ идёт с наклоном параллельно
построенной ранее ЛАЧХ.
Исходную
ЛАЧХ и ЖЛАЧХ разомкнутой системы, построенную методом Солодовникова изобразим
на рисунке 6.
Рисунок 6 - ЖЛАЧХ, построенная методом
Солодовникова
Передаточная функция разомкнутой системы,
скорректированной методом Солодовникова, будет иметь вид:
 . (21)
. (21)
Передаточная функция замкнутой
системы, скорректированной методом Солодовникова, будет иметь вид:
 =
= (22)
(22)
Тогда переходный процесс в замкнутой системе
скорректированной методом Солодовникова изобразим на рисунке 7:
Рисунок 7 - Переходный процесс в замкнутой
системе, скорректированной методом Солодовникова
Прямые оценки качества переходной
характеристики:
. Время регулирования tp=12 c;
Определим желаемую передаточную функцию
последовательного корректирующего устройства:
 (23)
(23)
Построим ЛАХЧ последовательного
корректирующего устройства
Рисунок 8 - ЛАЧХ последовательного
корректирующего устройства
Найдем передаточную функцию соответствующего
параллельного корректирующего устройства:
=Wraz*(Wk-1)(24)
 (25)
(25)
Найдем передаточную функцию соответствующего
встречно-параллельного корректирующего устройства:
Wvpark=(1-Wk)/(Wraz*Wk) (26)
 (27)
(27)
5. СИНТЕЗ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
.1 Синтез последовательного
корректирующего устройства
Задача синтеза, возникающая при
проектировании системы автоматического регулирования, заключается в таком
выборе структурной схемы системы и технических средств ее реализации, при
котором обеспечиваются требуемые динамические и эксплуатационные свойства всей
системы в целом.
Для нашей системы определяющим
параметром является быстродействие.. Передаточная функция необходимого КУ была
найдена на предыдущем этапе, теперь требуется определить структурную схему КУ,
его элементную базу и параметры необходимых элементов.
Для реализации выбираем
последовательное корректирующее устройство, так как его наиболее просто
реализовать;
=GW/Wraz(28)
 (29)
(29)
При таком виде ЛАЧХ КУ по справочнику находим
вид КУ. Получаем, что при таком виде ЛАЧХ корректирующего устройства, желаемую
передаточную функцию корректирующего звена можно реализовать двумя одинаковыми
дифференцирующими четренцирующими четс разделительным усилителем изобразим его
схему на рисунке 9.
Рисунок 9 -Схема корректирующего устройства
Передаточная функция дифференцирующего
четырехполюсника:
 ;(30) T1=R1∙C1=
0.0173; 2=KK1∙T1=0.0029. KK1=R2/(R1+R2)=0.16;
;(30) T1=R1∙C1=
0.0173; 2=KK1∙T1=0.0029. KK1=R2/(R1+R2)=0.16;
При этом усилитель должен иметь
коэффициент усиления:
 (31)
(31)
.2 Синтез программного корректирующего
устройства
Разработаем последовательное дискретное
корректирующее устройство:
Перейдем к дискретной передаточной функции:
Wkdis=c2d(Wk,0.01)
Wkdis= (32)
(32)
 (33)
(33)
Домножим числитель и знаменатель на 1/z2,
тогда:
 (34)
(34)
Запишем разностное уравнение в реальном масштабе
времени:

Расчет разностного уравнения
; x - входной сигнал
; y- выходной сигнал_port EQU 1lh;
номер порта для чтения_port EQU 12h; номер порта для записи
Al EQU 1.5118;
А2 EQU 2.102;
А3 EQU 1.6347;
А4 EQU 1.627;
B1 EQU
4.1343;EQU 2.6894;EQU 4.3111;, x2, x3 DB 0
;выделение памяти под переменные
x(k-l), x(k-2), x(k-3)
yl,y2, y3, DB 0
; выделение памяти под переменные
y(k-l), y(k-2)
; вычисляем значение
выражения(k)=Al*х1+А2*х2+А3*х3+В1*у1+В2*у2+В3*у3: ;метка начала цикла
коррекцииal, i_port; чтение данных из портаal,Al; вычисление слагаемого
А1*х1bl, al; сохранение результата в bl
; в результате имеем А1*х1 в
регистре blal, X2; вычислениеal, А2; слагаемого А2*х2bl, al; прибавление к
предыдущему результату
; в результате имеем А1*х1+А2*х2 в
регистре blal, X3; вычислениеal, А3; слагаемого А3*х3bl, al; прибавление к
предыдущему результату
; в результате имеем
А1*х1+А2*х2+А3*х3 в регистре blal, yl; вычислениеal, Bl; слагаемого Bl*ylbl,
al; прибавление к предыдущему результатуal, y2; вычислениеal, B2; слагаемого
В2*у2bl, al; прибавление к предыдущему результату
; в регистре bl имеем результат
вычисления всего выраженияy3, y2; для следующего такта
mov y2, y1;
yl, blx2, xl;xl, x;
out o_port, bl; вывод управляющего
сигнала из blstart; зацикливание на начало программы
.3 Выбор корректирующего устройства
Мощным методом коррекции стало применение
программных корректирующих устройств на МП, применение которых позволяет
варьировать параметры в широких пределах и быстро их изменять без изменения
технического исполнения системы (это также важно при коррекции старения
элементов системы программным способом, тогда как замена аналоговых устройств в
данном случае не рациональна). Еще одним достоинством данного способа является
точное выполнение зависимостей корректирующего устройства, тогда как для
аналоговых корректирующих устройств трудно добиться точности, так как трудно
точно подобрать номинал элементов в соответствии с расчетным.
Сравнивая эквивалентное время задержки на
корректирующих устройствах (суммируя время задержки на аналоговых элементах
включенных последовательно и выбирая большее из времен параллельно включенных)
с временем необходимым на программную коррекцию (число тактов необходимых на
реализацию операции умножения сигнала рассогласования на коэффициент ошибки)
приходим к выводу, что программная коррекция более эффективна.
Поскольку в системе уже есть встроенный МП, то
применение аналогового корректирующего устройства экономически нецелесообразно,
так как добавляются новые элементы.
В виду всего вышеперечисленного выбираем
программную коррекцию.
автоматизация аналоговый устройство
ЗАКЛЮЧЕНИЕ
Целью курсового проекта было постороение САУ
очистки стекла спортивного самолета. В результате моделирования первоначальная
не скорректированная система не удовлетворяла требованиям к качеству
управления. Изменение параметров отдельных элементов не позволяло получить
желаемого характера протекания переходного процесса. Включение
последовательного дискретного корректирующего устройства улучшило качество
переходного процесса и помогло достичь желаемых характеристик.
СПИСОК ЛИТЕРАТУРЫ
1 Бессонов Л.А. Теоретические основы
электротехники. Электрические цепи: Учебник.- 10-e
изд. M.: Гардарики, 2002.
. Воронов А.А. Теория
автоматического управления. М.:.Высш. шк., 1986.
. Гордин Е.М., Стародуб К.Я.
Автоматическое регулирование. М.:.Высш. шк., 1986.
. Горюнов Н.Н. Справочник по
полупроводниковым диодам, транзисторам и интегральным схемам. М.: Энергия,
1972.
. Дьяконов В.П. MATLAB
6/6.1/6.5+Simulink
4/5 в математике и моделировании. Полное руководство пользователя. М.:
СОЛОН-Пресс, 2003.
.Келим Ю.М. Типовые элементы систем
автоматизированного управления. М.:ФОРУМ:ИНФРА-М, 2002.
. Москаленко В.В. Системы
автоматизированного управления электроприводом. М.: ИНФРА-М, 2004.
. Орлов И.Н. Электротехнический
справочник. М.:Энергоатомиздат, 1986.
ПРИЛОЖЕНИЕ
БЛОК-СХЕМА ПРОГРАММЫ КОРРЕКЦИИ