Сетевое устройство. Факс-модемы. Internet каталоги
Контрольная работа №1
Компьютерные сети
Вариант 19
Оглавление
1. Сетевое соединительное
устройство - концентратор
.1 Функции концентраторов
.2 Многосегментные
концентраторы
.3 Управление концентратором
по протоколу SNMP
.4 Конструктивное исполнение
концентраторов
. Факс-модемы. Достоинства и
недостатки факсирования с использованием факс-модема
. Поиск информации в сети
Internet с помощью каталогов
. Программы факсирования
.1 Принцип работы и основные
возможности
.2 Программа для работы с факсом
VentaFax
Список литературы
1. Сетевое
соединительное устройство - концентратор
Практически во всех современных технологиях локальных сетей определено
устройство, которое имеет несколько равноправных названий - концентратор
(concentrator), хаб (hub), повторитель (repeator). В зависимости от области
применения этого устройства в значительной степени изменяется состав его
функций и конструктивное исполнение. Неизменной остается только основная
функция - это повторение кадра либо на всех портах (как определено в стандарте
Ethernet), либо только на некоторых портах, в соответствии с алгоритмом,
определенным соответствующим стандартом.
Концентратор обычно имеет несколько портов, к которым с помощью отдельных
физических сегментов кабеля подключаются конечные узлы сети - компьютеры.
Концентратор объединяет отдельные физические сегменты сети в единую разделяемую
среду, доступ к которой осуществляется в соответствии с одним из рассмотренных
протоколов локальных сетей - Ethernet, Token Ring и т. п. Так как логика
доступа к разделяемой среде существенно зависит от технологии, то для каждого
типа технологии выпускаются свои концентраторы - Ethernet; Token Ring; FDDI и
100VG-AnyLAN.
1.1
Функции концентраторов
Каждый концентратор выполняет некоторую основную функцию, определенную в
соответствующем протоколе той технологии, которую он поддерживает. Хотя эта
функция достаточно детально определена в стандарте технологии, при ее
реализации концентраторы разных производителей могут отличаться такими
деталями, как количество портов, поддержка нескольких типов кабелей и т.п.
Кроме основной функции концентратор может выполнять некоторое количество
дополнительных функций, которые либо в стандарте вообще не определены, либо
являются факультативными. Концентратор оказался удобным устройством для
выполнения дополнительных функций, облегчающих контроль и эксплуатацию сети.
Рассмотрим особенности реализации основной функции концентратора на
примере концентраторов Ethernet.
В технологии Ethernet устройства, объединяющие несколько физических
сегментов коаксиального кабеля в единую разделяемую среду, использовались давно
и получили название «повторителей» по своей основной функции - повторению на
всех своих портах сигналов, полученных на входе одного из портов.
Многопортовые повторители Ethernet на витой паре стали называть
концентраторами или хабами, так как в одном устройстве действительно
концентрировались связи между большим количеством узлов сети. Концентратор
Ethernet обычно имеет от 8 до 72 портов, причем основная часть портов предназначена
для подключения кабелей на витой паре. Он имеет 16 портов стандарта 10Base-T с
разъемами RJ-45, а также один порт AUI для подключения внешнего трансивера.
Обычно к этому порту подключается трансивер, работающий на коаксиал или
оптоволокно. С помощью этого трансивера концентратор подключается к
магистральному кабелю, соединяющему несколько концентраторов между собой, либо
таким образом обеспечивается подключение станции, удаленной от концентратора
более чем на 100 м.
Многопортовый повторитель-концентратор Ethernet может по-разному
рассматриваться при использовании правила 4-х хабов. В большинстве моделей все
порты связаны с единственным блоком повторения, и при прохождении сигнала между
двумя портами повторителя блок повторения вносит задержку всего один раз.
Поэтому такой концентратор нужно считать одним повторителем с ограничениями,
накладываемыми правилом 4-х хабов. Но существуют и другие модели повторителей,
в которых на несколько портов имеется свой блок повторения. В таком случае
каждый блок повторения нужно считать отдельным повторителем и учитывать его
отдельно в правиле 4-х хабов.
Некоторые отличия могут демонстрировать модели концентраторов, работающие
на одномодовый волоконно-оптический кабель. Дальность сегмента кабеля,
поддерживаемого концентратором FDDI, на таком кабеле может значительно
отличаться в зависимости от мощности лазерного излучателя - от 10 до 40 км.
Рассмотрим возможности реализации концентраторами дополнительных функций.
Очень полезной при эксплуатации сети является способность концентратора
отключать некорректно работающие порты, изолируя тем самым остальную часть сети
от возникших в узле проблем. Эту функцию называют автосегментацией
(autopartitioning). Для концентратора FDDI эта функция для многих ошибочных
ситуаций является основной, так как определена в протоколе. В то же время для
концентратора Ethernet или Token Ring функция автосегментации для многих
ситуаций является дополнительной, так как стандарт не описывает реакцию
концентратора на эту ситуацию. Основной причиной отключения порта в стандартах
Ethernet и Fast Ethernet является отсутствие ответа на последовательность
импульсов link test, посылаемых во все порты каждые 16 мс. В этом случае
неисправный порт переводится в состояние «отключен», но импульсы link test будут
продолжать посылаться в порт с тем, чтобы при восстановлении устройства работа
с ним была продолжена автоматически.
Концентраторы Ethernet и Fast Ethernet выполняют отключение порта в
следующих случаях:
· Ошибки на уровне кадра. Если интенсивность прохождения через порт кадров,
имеющих ошибки, превышает заданный порог, то порт отключается, а затем, при
отсутствии ошибок в течение заданного времени, включается снова. Такими
ошибками могут быть: неверная контрольная сумм, неверная длина кадра (больше 1518
байт или меньше 64 байт), неоформленный заголовок кадра.
· Множественные коллизии. Если концентратор фиксирует, что
источником коллизии был один и тот же порт 60 раз подряд, то порт отключается.
Через некоторое время порт снова будет включен.
· Затянувшаяся передача (jabber). Как и сетевой адаптер,
концентратор контролирует время прохождения одного кадра через порт. Если это
время превышает время передачи кадра максимальной длины в 3 раза, то порт
отключается.
Еще одной дополнительной функцией является поддержка резервных связей.
Так как использование резервных связей в концентраторах определено только в
стандарте FDDI, то для остальных стандартов разработчики концентраторов
поддерживают такую функцию с помощью своих частных решений. Обычно при
конфигурировании концентратора администратор должен определить, какие порты
являются основными, а какие по отношению к ним - резервными. Если по какой-либо
причине порт отключается (срабатывает механизм автосегментации), концентратор
делает активным его резервный порт. В некоторых моделях концентраторов
разрешается использовать механизм назначения резервных портов только для
оптоволоконных портов, считая, что нужно резервировать только наиболее важные
связи, которые обычно выполняются на оптическом кабеле. В других же моделях
резервным можно сделать любой порт.
К дополнительным функциям концентраторов относится защита от
несанкционированного доступа. Разделяемая среда предоставляет очень удобную
возможность для несанкционированного прослушивания сети и получения доступа к
передаваемым данным. Для этого достаточно подключить компьютер с программным
анализатором протоколов к свободному разъему концентратора, записать на диск
весь проходящий по сети трафик, а затем выделить из него нужную информацию.
Разработчики концентраторов предоставляют некоторый способ защиты данных
в разделяемых средах:
· Наиболее простой способ - назначение разрешенных МАС - адресов портам
концентратора. Защита заключается в том, что администратор вручную связывает с
каждым портом концентратора некоторый МАС - адрес. Этот МАС - адрес является
адресом станции, которой разрешается подключаться к данному порту. В случае
подключения к сети компьютера с недопустимым адресом порт отключается, а факт
нарушения прав доступа может быть зафиксирован.
· Другим способом защиты данных от несанкционированного доступа
является их шифрация. Однако процесс истинной шифрации требует большой
вычислительной мощности, и для повторителя, не буферизующего кадр, выполнить
шифрацию «на лету» весьма сложно. Вместо этого в концентраторах применяется
метод случайного искажения поля данных в пакетах, передаваемых портам с
адресом, отличным от адреса назначения пакета. Этот метод сохраняет логику
случайного доступа к среде, так как все станции видят занятость среды кадром
информации, но только станция, которой послан этот кадр, может понять
содержание поля данных кадра. Для реализации этого метода концентратор также
нужно снабдить информацией о том, какие МАС - адреса имеют станции,
подключенные к его портам. Обычно поле данных в кадрах, направляемых станциям,
отличным от адресата, заполняется нулями.
1.2
Многосегментные концентраторы
Между собой компьютеры, подключенные к разным сегментам, общаться через
концентратор не могут, так как шины внутри концентратора никак не связаны. Многосегментные
концентраторы нужны для создания разделяемых сегментов, состав которых может
легко изменяться. Большинство многосегментных концентраторов, например System
5000 компании Nortel Networks или PortSwitch Hub компании 3Com, позволяют
выполнять операцию соединения порта с одной из внутренних шин чисто программным
способом, например с помощью локального конфигурирования через консольный порт.
В результате администратор сети может присоединять компьютеры пользователей к
любым портам концентратора, а затем с помощью программы конфигурирования
концентратора управлять составом каждого сегмента. Если завтра сегмент 1 станет
перегруженным, то его компьютеры можно распределить между оставшимися
сегментами концентратора.
Возможность многосегментного концентратора программно изменять связи
портов с внутренними шинами называется конфигурационной коммутацией
(configuration switching).
Многосегментные концентраторы - это программируемая основа больших сетей.
Для соединения сегментов между собой нужны устройства другого типа -
мосты/коммутаторы или маршрутизаторы. Такое межсетевое устройство должно
подключаться к нескольким портам многосегментного концентратора, подсоединенным
к разным внутренним шинам, и выполнять передачу кадров или пакетов между
сегментами точно так же, как если бы они были образованы отдельными
устройствами-концентраторами.
Для крупных сетей многосегментный концентратор играет роль
интеллектуального кроссового шкафа, который выполняет новое соединение не за
счет механического перемещения вилки кабеля в новый порт, а за счет
программного изменения внутренней конфигурации устройства.
.3
Управление концентратором по протоколу SNMP
Многие дополнительные функции требуют конфигурирования концентратора. Это
конфигурирование может производиться локально, через интерфейс RS-232C, который
имеется у любого концентратора, имеющего блок управления. Кроме
конфигурирования в большой сети очень полезна функция наблюдения за состоянием
концентратора: работоспособен ли он, в каком состоянии находятся его порты.
При большом количестве концентраторов и других коммуникационных устройств
в сети постоянное наблюдение за состоянием многочисленных портов и изменением
их параметров становится очень обременительным занятием, если оно должно
выполняться с помощью локального подключения терминала. Поэтому большинство
концентраторов, поддерживающих интеллектуальные дополнительные функции, могут
управляться централизованно по сети с помощью популярного протокола управления
SNMP (Simple Network Management Protocol) из стека TCP/IP.
В блок управления концентратором встраивается так называемый SNMP-агент.
Этот агент собирает информацию о состоянии контролируемого устройства и хранит
ее в так называемой базе данных управляющей информации - Management In
formation Base, MIB. Эта база данных имеет стандартную структуру, что позволяет
одному из компьютеров сети, выполняющему роль центральной станции управления,
запрашивать у агента значения стандартных переменных базы MIB. В базе MIB
хранятся не только данные о состоянии устройства, но и управляющая информация,
воздействующая на это устройство. Например, в MIB есть переменная, управляющая
состоянием порта, имеющая значения «включить» и «выключить». Если станция
управления меняет значение управляющей переменной, то агент должен выполнить это
указание и воздействовать на устройство соответствующим образом, например,
выключить порт или изменить связь порта с внутренними шинами концентратора.
Взаимодействие между станцией управления (по-другому - менеджером системы
управления) и встроенными в коммуникационные устройства агентами происходит по
протоколу SNMP. Концентратор, который управляется по протоколу SNMP, должен
поддерживать основные протоколы стека TCP/IP и иметь IP- и МАС-адреса. Точнее,
эти адреса относятся к агенту концентратора. Поэтому администратор, который
хочет воспользоваться преимуществами централизованного управления
концентраторами по сети, должен знать стек протоколов TCP/IP и сконфигурировать
IP-адреса их агентов.
.4
Конструктивное исполнение концентраторов
На конструктивное устройство концентраторов большое влияние оказывает их
область применения. Концентраторы рабочих групп чаще всего выпускаются как
устройства с фиксированным количеством портов, корпоративные концентраторы -
как модульные устройства на основе шасси, а концентраторы отделов могут иметь
стековую конструкцию. Такое деление не является жестким, и в качестве
корпоративного концентратора может использоваться, например, модульный
концентратор.
Концентратор с фиксированным количеством портов - это наиболее простое конструктивное
исполнение, когда устройство представляет собой отдельный корпус со всеми
необходимыми элементами (портами, органами индикации и управления, блоком
питания), и эти элементы заменять нельзя. Обычно все порты такого концентратора
поддерживают одну среду передачи, общее количество портов изменяется от 4-8 до
24. Один порт может быть специально выделен для подключения концентратора к
магистрали сети или же для объединения концентраторов (в качестве такого порта
часто используется порт с интерфейсом AUI, в этом случае применение
соответствующего трансивера позволяет подключить концентратор к практически
любой физической среде передачи данных).
Модульный концентратор выполняется в виде отдельных модулей с
фиксированным количеством портов, устанавливаемых на общее шасси. Шасси имеет
внутреннюю шину для объединения отдельных модулей в единый повторитель. Часто
такие концентраторы являются многосегментными, тогда в пределах одного
модульного концентратора работает несколько несвязанных между собой повторителей.
Для модульного концентратора могут существовать различные типы модулей,
отличающиеся количеством портов и типом поддерживаемой физической среды. Часто
агент протокола SNMP выполняется в виде отдельного модуля, при установке
которого концентратор превращается в интеллектуальное устройство. Модульные
концентраторы позволяют более точно подобрать необходимую для конкретного
применения конфигурацию концентратора, а также гибко и с минимальными затратами
реагировать на изменения конфигурации сети.
Ввиду ответственной работы, которую выполняют корпоративные модульные
концентраторы, они снабжаются модулем управления, системой терморегулирования,
избыточными источниками питания и возможностью замены модулей «на ходу».
Недостатком концентратора на основе шасси является высокая начальная
стоимость такого устройства для случая, когда предприятию на первом этапе
создания сети нужно установить всего 1-2 модуля. Высокая стоимость шасси
вызвана тем, что оно поставляется вместе со всеми общими устройствами, такими как
избыточные источники питания и т. п. Поэтому для сетей средних размеров большую
популярность завоевали стековые концентраторы.
Стековый концентратор, как и концентратор с фиксированным числом портов,
выполнен в виде отдельного корпуса без возможности замены отдельных его
модулей. Однако стековыми эти концентраторы называются не потому, что они
устанавливаются один на другой. Такая чисто конструктивная деталь вряд ли
удостоилась бы особого внимания, так как установка нескольких устройств
одинаковых габаритных размеров в общую стойку практикуется очень давно.
Стековые концентраторы имеют специальные порты и кабели для объединения
нескольких таких корпусов в единый повторитель, который имеет общий блок
повторения, обеспечивает общую ресинхронизацию сигналов для всех своих портов и
поэтому с точки зрения правила 4-х хабов считается одним повторителем.
Если стековые концентраторы имеют несколько внутренних шин, то при
соединении в стек эти шины объединяются и становятся общими для всех устройств
стека. Число объединяемых в стек корпусов может быть достаточно большим (обычно
до 8, но бывает и больше). Стековые концентраторы могут поддерживать различные
физические среды передачи, что делает их почти такими же гибкими, как и
модульные концентраторы, но при этом стоимость этих устройств в расчете на один
порт получается обычно ниже, так как сначала предприятие может купить одно
устройство без избыточного шасси, а потом нарастить стек еще несколькими
аналогичными устройствами.
Стековые концентраторы, выпускаемые одним производителем, выполняются в
едином конструктивном стандарте, что позволяет легко устанавливать их друг на
друга, образуя единое настольное устройство, или помещать их в общую стойку.
Экономия при организации стека происходит еще и за счет единого для всех
устройств стека модуля SNMP-управления (который вставляется в один из корпусов
стека как дополнительный модуль), а также общего избыточного источника питания.
Модульно-стековые концентраторы представляют собой модульные
концентраторы, объединенные специальными связями в стек. Как правило, корпуса
таких концентраторов рассчитаны на небольшое количество модулей (1-3). Эти
концентраторы сочетают достоинства концентраторов обоих типов.
концентратор факс каталог internet
2.
Факс-модемы. Достоинства и недостатки факсирования с использованием факс-модема
Сегодня все современные модемы выпускаются с поддержкой передачи
факсимильных сообщений, то есть это - факс-модемы. Разумеется, факс-модем не
может полностью заменить факс-машину в офисной деятельности, но он может
существенно поднять производительность работы, если научиться им правильно и
эффективно пользоваться. Что касается домашнего компьютера, то здесь факс-модем
может удовлетворить потребности в эпизодическом использовании факсимильной
связи для 99,999% пользователей. При факсимильной связи по телефонной линии
передаются в виде нулей и единиц строки точек (пикселов) черного и белого
цвета, которые на принимающей стороне последовательно выводятся на лист бумаги.
Это похоже на то, как точка за точкой печатает изображение матричный или
струйный принтер. Для того чтобы разложить отправляемое изображение на пикселы,
используется сканер. Таким образом, в состав каждой факс-машины входит три
базовых устройства: сканер, модем и принтер. Разумеется, в состав факс-машины
входит и телефонный аппарат, - причем часто достаточно дорогой, - с
автоответчиком и памятью. Наиболее распространены факс-машины, которые печатают
на рулонной термочувствительной бумаге, однако такое изображение нестойко,
имеет малое время хранения и через пару лет полностью выцветает. Поэтому более
дорогие модели современных факс-машин используют встроенный лазерный или
струйный принтер, и печатают на обычной бумаге формата А4. Факс-модемы
представляют собой лишь одну из базовых частей факс-машины, - модем для
передачи и приема строк пикселов. Поскольку в компьютере все документы уже
представлены в электронном виде, то практически отпадает нужда в сканере (за
исключением того случая, когда документ представлен в виде бумажной копии,
например, написан от руки, и его требуется ввести в компьютер). Для
формирования последовательностей пикселов факс-модем использует специальное
программное обеспечение, преобразующее текстовый документ или рисунок в одном
из графических форматов, в соответствующие строки пикселов. При приеме
изображения, наоборот, программное обеспечение факс-модема сохраняет пришедшие
строки пикселов в виде файла на жестком диске компьютера, и пользователь может
распечатать его на принтере или просмотреть с помощью соответствующего приложения.
Преимущества факс-модемов:
. Передача сообщения через факс-модем происходит значительно
быстрее, поскольку не требуется вставлять новые листы бумаги и сканировать их
перед передачей. Для многостраничного документа разница в скорости между
факс-модемом и факс-машиной может достигать нескольких раз.
. Отсутствие ошибок передачи из-за «человеческого фактора». Кому
из пользователей факс-машин не знакомы перекос страниц, замятие бумаги, а также
необходимость «ловить момент», когда пора вставить следующий лист? Факс-модем
избавляет пользователя от этих проблем.
. Лучшая организация рабочего процесса за счет применения безбумажной
технологии. Используя факс-модем, вам не придется предварительно распечатывать
документ, периодически проверять рулон пришедших сообщений в ожидании важного
документа. Не надо тратить рабочее время и расходные материалы (бумагу,
картриджи) на рутинные вспомогательные процессы.
. Легкая организация рассылки факсимильных сообщений множеству
пользователей и экономия средств на обеспечение этого процесса. С помощью
программного обеспечения по управлению факс-модемом легко организовать списки
рассылки и задать время рассылки в период действия пониженных тарифов на
телефонную связь (например, ночью). В этом большое преимущество факс-модемов.
Хотя современные факс-машины и позволяют загрузить пачку листов для
последовательной рассылки, вряд ли кто из пользователей отважится отправлять
факсы таким образом без присмотра человека. Слишком велика вероятность перекоса
и замятия бумаги.
. Дополнительные сервисные функции, обеспечивающиеся аппаратными или
программными средствами факс-модема. К таким сервисным функциям относится
встроенный АОН (автоматическое определение номера), автоответчик, диспетчер
звонков, рассылка голосовых сообщений и т.д. К примеру, факс-модем может
автоматически определить, что на другом конце линии трубку снял человек, а не
факс-аппарат. В этом случае факс-модем может вначале воспроизвести в трубку
голосом записанное в память сообщение, например, «Нажмите, пожалуйста, кнопку
START для приема факса из фирмы N», а затем, проверив наличие ответного сигнала
факс-аппарата, приступить уже к передаче по факсу конкретного документа.
. Повышение достоверности передачи факсимильных сообщений. Программное
обеспечение по управлению факс-модемом позволяет задать число повторов попыток
отправить факсы по занятым телефонным номерам и сформировать отчет о своей
работе - куда факсимильные сообщения были успешно отправлены, а в каких случаях
этого сделать не удалось.
. Низкая цена устройства и расходных материалов. Как правило,
стоимость факс-модема значительно ниже, чем факс-машины. Хотя, конечно, в
продаже есть и дорогие профессиональные факс-модемы, и дешевые факс-машины. Что
касается расходных материалов, то термобумага для факс-машин существенно дороже
обычной, а когда термобумага кончается, то прием сообщений становится и вовсе
невозможен.
. Возможность отправлять и получать факсимильные сообщения в виде файлов
того формата, который использовался при подготовке документов, если на обоих
концах линии установлены факс-модемы. Тогда полученный документ не придется
набирать заново на клавиатуре ПК или сканировать для распознавания программой
OCR. Даже если документ был отправлен на факс-модем с факс-машины, то программа
распознавания все равно сократит вашу работу по вводу текста в компьютер.
. Возможность передавать шифрованные факсы. Если на обоих концах линии
установлены факс-модемы, то факсимильные сообщения можно зашифровать, что
повышает уровень безопасности при пересылке конфиденциальной информации.
. Снижение расходов на международную телефонную связь при пересылке
факсимильных сообщений по сети Internet. Используя сеть Internet, вы можете
практически полностью отказаться от пересылки факсов по международным
телефонным линиям. Если ваша деятельность связана с частой пересылкой
международных факсов, такая возможность сулит значительное сокращение расходов
(этот сервис обычно предоставляется по сниженным тарифам по заранее оплаченным
телефонным карточкам некоторыми Intemet-провайдерами или телефонными
компаниями). При этом на другом конце линии могут быть установлены как
факс-модемы, так и обычные факс-машины.
Как не велика эффективность применения факс-модемов в повседневной
офисной работе, вряд ли сегодня удастся обойтись без помощи факс-машин. Это
связано с тем, что факс-модемы имеют недостатки в сравнение с факс-машинами.
Недостатки факс-модемов:
. Факс-модемы неудобны, например, когда пересылаются рукописные
документы, или при обслуживании аппарата малоквалифицированным персоналом, а
также для получения документов, хранение которых необязательно.
. Кроме того, поскольку факс-модем управляется компьютером, то необходимо
держать постоянно включенным и сам компьютер. Кроме того, любые неполадки
компьютера могут вызвать неработоспособность факс-модема. Сюда относятся и
проблемы с программным обеспечением, например, при попадании на диск
компьютерных вирусов. Можно также упомянуть о такой проблеме, как большой
размер растровых файлов, куда записываются сообщения, пришедшие с факс-машин, и
поэтому также понадобится достаточно много места на жестком диске компьютера.
Стоит отметить, что на рынке существуют дорогие профессиональные факс-модемы,
которые могут записать факс в собственную энергонезависимую память даже при
выключенном или вышедшем из строя компьютере, а при подключении компьютера
воспроизвести его затем на экране
. Затраты на программное обеспечение для управления факс-модемом. Хотя
можно использовать для работы стандартные программы факсирования или то
программное обеспечение, что входит в комплект поставки факс-модема, но эти
программы не всегда могут удовлетворить потребности. И В этом случае приходится
приобретать программное обеспечение.
3. Поиск
информации в сети Internet с помощью каталогов
Сеть Интернет растет очень быстрыми темпами, поэтому найти нужную
информацию среди сотен миллиардов Web-страниц и сотен миллионов файлов
становится все сложнее. Для поиска информации используются специальные
поисковые системы и каталоги, которые содержат постоянно обновляемую информацию
о местонахождении Web-страниц и файлов на сотнях миллионов серверов Интернета.
При первичном поиске информации целесообразно использовать поисковые
каталоги. Они предоставляют доступ к меньшему количеству страниц, чем поисковые
индексы, и точнее указывают на основные ресурсы Сети.
Когда необходимая информация ограничена только общей темой можно
воспользоваться услугами так называемых каталогов веб-сайтов. Каталоги в WWW
аналогичны систематическим библиотечным каталогам. В отличие от поисковых
машин, здесь не нужно вводить ключевые слова, достаточно определиться с общей
тематикой. Каталоги часто называют рейтингами, так как ссылки упорядочены по
убыванию: сначала даются ссылки на самые информационно насыщенные сайты.
Поиск по каталогам состоит в последовательном движении по иерархическому
списку ссылок, называемых рубриками или категориями. На первой странице
каталога содержится ссылки на крупные темы, например, Культура и искусство;
Медицина и здоровье; Общество и политика; Бизнес и экономика; Развлечения и др.
Щелчок мыши на соответствующей ссылке (категории) открывает страницу,
содержащую ссылки, детализирующие выбранную тему (рубрику). Двигаясь вниз по
детализирующим категориям, можно найти страницу с нужной информацией. На каждой
странице, открываемой при движении по каталогу тем или иным способом,
указывается последовательность просмотренных вложенных рубрик, например, Деловой
мир: Финансы: Аналитика и т.д.
Все каталоги создаются и поддерживаются в актуальном состоянии вручную
специалистами, аналогично тому, как библиографы составляют и поддерживают
библиотечные каталоги. Описание документа делается либо составителями каталога,
либо автором. Благодаря этому, содержание страниц, включенных в каталог,
наиболее адекватно соответствует рубрике, к которой они отнесены. Но, учитывая
скорость пополнения и изменения информации в Интернет, «ручной» способ ведения
каталогов не позволяет равноценно отражать реальное состояние ресурсов Интернет
на данную тему.
Хоть веб-каталоги и поисковые машины - два принципиально различных
средства поиска в сети Интернет, они часто находятся на одних и тех же сайтах.
Например, на сайте поисковой машины «Рамблер» размещен рейтинг сайтов «Тор
100».
Есть каталоги также на сайтах «Яндекс», Mail.Ru, Yahoo! и многих других.
Получить исчерпывающий список ссылок на веб-каталоги можно с помощью либо тех
же каталогов, либо поисковых машин. На рисунке 1. представлена главная страница
каталога «Яндекс».
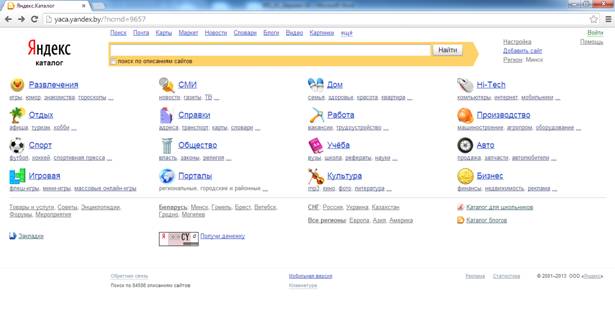
Рис. 1. Главная страница каталога «Яндекс»
Выбрав, к примеру, рубрику Учеба, мы попадем на новую страницу,
содержащую 7147 сайтов (рис. 2):
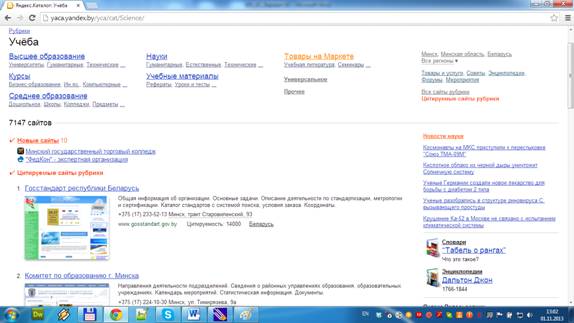
Рис. 2 Страница рубрики «Учеба» каталога «Яндекс»
4.
Программы факсирования
.1 Принцип
работы и основные возможности
При обмене информацией не только с другими компьютерами, но и между ПК и
факсимильными устройствами используются современные модемы. С помощью модема
возможно, например, переслать сообщение с компьютера на факс-аппарат и обратно.
Модем, работающий в этом режиме, называется факс-модемом. Работа с данным
аппаратом производится с помощью специальных коммутационных программ или
универсальных программ-органайзеров. Установление факса осуществляется после
инсталляции модема или при инсталляции программ работы с факсом, или при первом
обращении к факсу. В группу Принтеры помещается пиктограмма факса, а сам факс,
как и принтер, соединяется со специальным «логическим» портом. После установки
факса к этому порту возможно обращаться и из других приложений, как к принтеру.
Одним из способов отправления на факс документа, который был создан каким-либо
приложением, является его распечатка по команде Печать. При этом в качестве
принтера указывается инсталлированный факс. Изменение параметров работы факса и
его настройку выполняют в окне Свойства для соответствующего факса в группе
Принтеры.
Факсимильное сообщение можно отправить с помощью:
) программы, в которой подготовлен документ. Данный способ является самым
простым, если в меню Файл программы, подготовившей документ, имеются команды
Печать или Отправить. В качестве принтера устанавливается соответствующий факс
и выдается команда печати;
) программ-органайзеров;
) коммутационных программ, которые обладают возможностью посылки
факсимильных сообщений.
При отправке сообщения возникает окно, в котором необходимо заполнить
заголовок сообщения, содержащий следующие поля:
• Кому - с одним или несколькими адресами получателей сообщения;
• Копия - с адресами получателей копий, при этом в некоторых системах
основные адресаты могут быть как извещены, так и не ставиться в известность о
наличии копий;
• Тема - краткая информация о сообщении.
Для упрощения задания адресов есть адресные книги, включающие в себя
список часто используемых адресов, а также формы сообщений, которые содержат
целиком заголовки различного типа.
Сообщения могут содержать текст, непосредственно набираемый в специальном
окне, и вложение (текстовой, графический и другие файлы или электронную
таблицу). Сообщение может включать в себя только вложения. Оно имеет такой вид,
если посылается из прикладной программы по команде Печать или Отправить. От
незаконного доступа сообщения защищаются различными способами: паролем,
ключами, электронной подписью и др.
При отправлении сообщения можно указать:
• срочность доставки - немедленно, точно в заданные дату и время, в
определенный интервал времени по «дешевому тарифу»;
• наличие и вид титульного листа, отделяющего одно сообщение от другого;
• качество печати и размер бумаги;
• необходимость подтверждения получения сообщения и способ защиты;
• количество повторных попыток переслать сообщение, когда это не удается
сразу сделать;
• необходимость сохранения сообщения.
Принимать сообщения можно автоматически и вручную. Модем и компьютер при
автоматическом приеме должны быть включены, а коммуникационная программа
запущена при передаче сообщения (если в процессе обмена не участвует почтовый
сервер). Факс при автоматическом приеме должен быть установлен в режим Получать
факс автоматически.
В настоящее время разработано очень много программ факсирования разного
уровня. Произвести обзор всех существующих программ не представляется возможным.
Но стоит отметить, что во всех программах реализованы основные функции для
работы с факсом. Отличия же состоят в дополнительных возможностях, интерфейсах
и т.п.
.2
Программа для работы с факсом VentaFax
Произведем обзор популярной программы для работы с факсом VentaFax. Программы серии VentaFax
предназначены для приема и передачи факсов и голосовых сообщений через
факс-модем (обычная телефония) и Интернет (Интернет-телефония). Пакет программ
VentaFax предназначен для работы под управлением 32-разрядных операционных
систем семейства MS Windows (Windows 8, 7, Vista, XP, 2000) и 64-разрядных
операционных систем MS Windows 8, 7, Vista, XP.
Основные функции: автоответчик, АОН, рассылка факсов и голосовых
сообщений, запись разговора, передача принятых сообщений по электронной почте и
многое другое.
Программы пакета имеют простой и удобный графический интерфейс, который
делает освоение программы не только легким, но и приятным.
Программа поддерживает работу как с черно-белыми, так и с цветными
факсами. Можно принять и отправить факс вручную, не прерывая разговора по
параллельному телефону или используя Интернет-телефонию. Также можно отправить
факс с набором номера. В режиме автоматического ответа на входящие звонки
программа примет факс автоматически, без участия пользователя (кроме версии
Private).
Все версии пакета VentaFax обеспечивают также прием и отправку голосовых
сообщений, а также имеют возможность организовать автоинформатор или
автоответчик (Примечание. При использовании обычной телефонии необходим голосовой
модем).
Все версии пакета VentaFax обеспечивают также распознавание типа ответа
при входящих и исходящих звонках. Например, при попытке отправить факс,
программа обнаружила, что ей ответили голосом. В этом случае она сможет перед
началом передачи факса воспроизвести в линию заданную реплику, например,
"Примите, пожалуйста, факс". В режиме автоматического ответа на
входящие звонки программа сама определит, пытаются ли Вам передать факс или
что-то сообщить, самостоятельно включив прием факса или запись голосового
сообщения.
Бизнес-версии пакета VentaFax позволяют дополнительно осуществлять
массовую рассылку факсимильных и/или голосовых сообщений автоматически по
расписанию в удобное для пользователя время. Кроме того, принятые сообщения
могут быть автоматически отправлены на один или несколько адресов по
электронной почте. Имеется возможность автоматического преобразования входящих
факсов в формат PDF и другие отличия.
Многолинейные версии работают одновременно с несколькими телефонными
линиями, осуществляя прием и передачу сообщений с помощью нескольких модемов,
подключенных к одному компьютеру и/или осуществляют несколько одновременных
подключений к VoIP-провайдеру.
В состав пакета VentaFax также включены:
· Программа Телефонный справочник: обеспечивает ведение, редактирование,
дополнение телефонных справочников Ваших абонентов, а также обмен данными с
базами телефонов других форматов.
· Программа Менеджер сообщений: обеспечивает как просмотр
подготовленных Вами и полученных факсов, так и прослушивание подготовленных
Вами и полученных голосовых сообщений.
· Программа Журнал: фиксирует все операции приема и
отправки факсимильных сообщений и телефонограмм.
· Программа VentaFax Script Editor: представляет собой
специализированный текстовый редактор, обеспечивающий удобную среду разработки
сценариев дистанционного управления VentaFax с использованием DTMF-сигналов.
· Программа Расписание помогает организовать массовую рассылку
сообщений (факсов и голосовых сообщений - телефонограмм) автоматически по
расписанию в удобное для пользователя время. В отличие от бизнес-версии, где
число записей в расписании не ограничено, в версии MiniOffice их число не может
превышать 3.
Приведенная информация не исчерпывает всех возможностей пакета VentaFax,
которые постоянно развиваются и совершенствуются.
Версии Private и MiniOffice пакета VentaFax распространяются по
принципу shareware. Этот термин означает, что можно установить программу на
свой компьютер в тестовых целях и использовать ее в течение ограниченного срока
(к примеру, 30 дней) с тем, чтобы по истечении этого времени либо
зарегистрировать программу, уплатив регистрационный взнос, либо отказаться от
ее использования, удалив ее со своего компьютера.
Бизнес-версии пакета VentaFax распространяются только после предварительной
оплаты лицензии и для тестирования не передаются.
На рис. 3-5 представлены окна работы VentaFax.

Рис. 3. Главное окно программы VentaFax
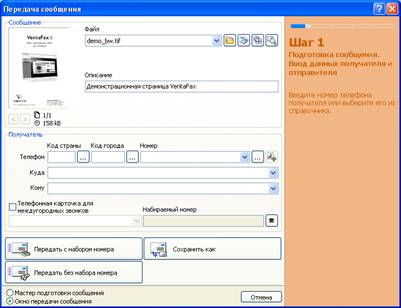
Рис. 4. Окно «Передача сообщения»
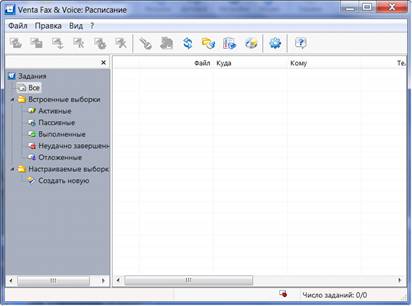
Рис. 5. Окно «Расписание»
Список
литературы
1. Олифер
В.Г., Олифер Н.А. Компьютерные сети. Принципы, технологии, протоколы. - С.-
Пб.: Издательство «Питер», 2001. - 672 с.
. Березин
С.В. Факсимильная связь в Windows. Серия "Мастер". - СПб.:
BHV-Санкт-Петербург, 2001 - 304 с.: ил.
. Шиндер Д.
Основы компьютерных сетей. - М.: Издательский дом “Вильямс”, 2002. - 656 с.
.
Вильховченко С.Д. Модем 96. - М.:ABF, 1995. - 284 c.
. Электронный
конспект лекций.
.
Методические указания к лабораторным работам по дисциплине «Компьютерные сети».
. VentaFax6.0. Руководство пользователя.