Разработка Web-интерфейса для АСУ ДНС Ватьеганского месторождения в инструментальном пакете Trace Mode 6
Содержание
Реферат
Введение
. Описание технологического процесса и схемы автоматизации
.1 Работа установки через резервуарный парк
.2 Работа установки без резервуарного парка
. Разработка системы управления ДНС
.1 Автоматизация технологического процесса
.1.1 Требования к системе автоматизации
.1.2 Функции системы управления
.1.3 Требования к комплексу технических средств (КТС)
.1.4 Комплекс технических средств
.2 Выбор и обоснование RTU, MTU
.2.1 Функции системы и обоснование выбора контроллера
.2.2 Описание алгоритма работы контроллера
.2.3 Рабочее место оператора
.3 Операторский интерфейс. HMI
.3.1 Разработка FBD - программ
. Web - интерфейс
.1 Понятие Web - интерфейса
.2 Обработка данных по web - технологии клиент-сервер
.3 Протокол HTPP
.4 Организация Web - интерфейса в инструментальном пакете
Trace Mode
. Расчет надежности
.1 Общие положения
.2 Методика расчета показателей надежности
.3 Расчет показателей надежности проектируемой системы
.4 Выводы по разделу
. Расчет системы автоматического регулирования уровня в
сепараторе
.1 Сепаратор как система автоматического регулирования
.2 Структурная схема САР с цифровым регулятором
.3 Определение передаточной функции объекта по его переходной
характеристике
.4 Расчет оптимальных параметров настройки цифрового
регулятора
.5 Построение переходного процесса в системе регулирования
.5.1 Оценка качества регулирования
. Комплексная оценка экономической эффективности ДНС
.1 Методика расчета экономических показателей проектируемой
системы
.2 Расчет капитальных вложений на вводимую систему
автоматизации
.2.2 Расчет затрат на проектирование (разработку) системы
.2.3 Расчет затрат на разработку программного обеспечения
.2.4 Расчет затрат на изготовление и отладку проектируемой
системы
.3 Расчет обобщающих показателей экономической эффективности
. Безопасность и экологичность проекта
.1 Расчет производственного освещения
.2 Пожаробезопасность
.3 Экологичность проекта
.3.1 Расчет выбросов загрязняющих веществ в атмосферу
.3.2 Расчет платы за загрязнение атмосферы выбросами предприятия
.4 Оценка чрезвычайной ситуации
.5 Выводы по разделу
Заключение
Список использованных источников
Приложение А
Приложении Б
Приложение В
Приложение Г
Приложение Д
Приложение Е
Приложение Ж
Приложение И
Приложение К
Введение
Современные нефте- и газодобывающие предприятия представляют собой
сложные комплексы технологических объектов, рассредоточенных на больших
площадях, размеры которых достигают десятков и сотен квадратных километров.
Технологические объекты (скважины, групповые измерительные установки,
сепарационные установки, сборные пункты, установки комплексной подготовки нефти
и газа, резервуарные парки) связаны между собой через продуктивный пласт и
поток продукции, циркулирующей по технологическим коммуникациям. Добыча нефти и
газа производится круглосуточно, в любую погоду, по этому для нормального
функционирования нефтегазодобывающего предприятия необходимо обеспечить
надежную работу автоматизированного оборудования, дистанционный контроль за
работой технологических объектов и их состоянием.
Добыча нефти и газа является сложным и опасным производством, требующим
постоянного контроля со стороны человека, на которого возлагается большая
ответственность. Для помощи человеку, а иногда и для его полной замены,
внедряются системы автоматического и автоматизированного управления. Данные
системы позволяют автоматически и дистанционно управлять работой
технологических объектов, осуществлять контроль на больших расстояниях.
Использование современных технологий автоматизации и средств передачи данных во
много раз повышает надежность таких систем и производства в целом [1].
1. Описание
технологического процесса и схемы автоматизации
Промышленная установка ДНС Ватьеганского месторождения предназначена для
дегазации сырой нефти (газонефтяной эмульсии). Генеральный план и схема
автоматизации данной установки представлены в приложениях А и Б соответственно.
Сырая нефть под давлением 0,27 МПа и температурой 5-20°С через задвижку 2, поступает в УПОГ
(узел предварительного отбора газа), где происходит первичное отделение
попутного нефтяного газа, который под давлением 0,25 МПа направляется в газовый
сепаратор Г-1. После УПОГ сырая нефть под давлением 0,25 МПа поступает в
сепараторы С-1/1,2, где при давлении 0,22 МПа происходит первая ступень
сепарации, отделившийся газ, под давлением 0,22 МПа поступает в газовый
сепаратор Г-1 для отделения капельной жидкости, после чего газ под давлением
0,22 МПа поступает в газовые линии на ЦПС, в котельную через УПТГ, дежурную
свечу и запал.
Частично разгазированная нефть с С-1/1,2 через клапанные сборки под
давлением 0,22 МПа поступает в сепаратор второй ступени С-2/1, где происходит
вторая ступень сепарации. Отделившаяся от газа жидкость в Г-1, под давлением
0,25 МПа так же направляется в линию на 2 ступень сепарации.
Контроль уровня в С-1/1,2 осуществляется прибором ДУУ-3 с выводом
показаний в операторную, регулирование уровня и давления осуществляется
регулирующими клапанами.
После прохождения второй ступени сепарации отделившийся газ через
задвижки под давлением 0,02 МПа направляется на факел, нефть, через клапанную
сборку направляется под давлением 1 МПа в РВС-2000 или через фильтрующий
элемент, на насосную внешней перекачки.
Тип, марка, краткие технические характеристики датчиков представлены в
таблице В.1.
1.1 Работа установки
через резервуарный парк
После прохождения второй ступени сепарации, разгазированная сырая нефть
под давлением 1МПа направляется в РВС 2000.
Контроль уровня в РВС осуществляется уровнемером ДУУ-3 с выводом
информации в операторную в цифровом виде.
Из РВС через фильтрующий элемент под давлением (0,3 - 0,8) МПа поступает
на насосы внешней перекачки Н1-3 и далее под давлением 2,3 МПа направляется на
оперативный узел учета нефти. Нефть проходит через задвижки и под давлением 2
МПа направляется в напорный нефтепровод;
1.2 Работа
установки без резервуарного парка
Работа установки без РВС-2000 осуществляется при закрытых задвижках № 29,
32, далее аналогично пункту 1.1.
Работа насосной внешней перекачки позволяет запустить необходимое
количество любых насосов в зависимости от объема перекачиваемой жидкости.
Оперативный узел учета нефти состоит из линии на которой установлен
массовый расходомер фирмы «FISHER
- ROSEMOUNT» марки CMF - 300, позволяющий осуществлять количественный и
качественный объем перекачиваемой жидкости с возможностью распечатки на
принтере [2].
2. Разработка
системы управления ДНС
.1
Автоматизация технологического процесса
2.1.1
Требования к системе автоматизации
Данная система автоматизации предназначена для
реконструкции устаревшей система управления, не отвечающей современным
требованиям и не обеспечивающей оптимального и экономичного протекания
технологического процесса.
Требования к системе сформулированы с учетом
характеристик и функциональных возможностей современных технических и
программных средств.
Система должна обеспечивать выполнение:
) функций управления технологическим процессом;
) информационных функций;
) функций обслуживания системы.
Требования к структуре системы управления.
Система должна иметь иерархическую структуру,
включающую:
) рабочее место со средствами операторского
интерфейса;
) программно-технический комплекс (ПТК);
) полевое оборудование.
Система должна обеспечивать ввод:
) аналоговых входных сигналов 4÷20 мА
) дискретных входных сигналов (сухой контакт)
Система должна обеспечивать вывод:
) дискретных выходных сигналов (сухой контакт)
В системе должен быть предусмотрен резерв устройств
ввода/вывода сигналов для возможного подключения к системе дополнительных
датчиков и исполнительных устройств.
Выходные сигналы системы должны обеспечивать
управление:
) регулирующими клапанами;
) электроприводными задвижками;
) насосными агрегатами.
Требования к надежности: система должна обеспечивать
непрерывное круглосуточное ведение технологического режима, сохранять возможность
выполнения основных функций при выходе из строя отдельных элементов и позволять
производить их замену без отключения всей системы.
Система не должна самопроизвольно включать или
отключать (закрывать или открывать) исполнительные устройства при любых неисправностях
системы управления, а также при переходе на резервное питание.
В системе должны быть предусмотрены программные
средства защиты от неквалифицированных действий персонала, способных привести к
нарушениям технологического режима.
Система должна обеспечивать работоспособность при
отключениях электроэнергии до 30 мин. за счет применения источников
бесперебойного питания.
Требования к стандартизации: система должна
создаваться в виде открытой системы и должна быть построена на базе
стандартных, лицензионных программных и технических средств и исключать
необходимость пользовательской доработки программных средств [2].
2.1.2 Функции
системы управления
Система обеспечивает выполнение следующих функций
управления:
− автоматическое регулирование:
) регулирование давления в газосепараторе Г-1;
) регулирование уровня в сепараторах первой ступени
С-1/1,2;
) регулирование уровня в сепараторе второй ступени
С-2/1;
− дискретное (логическое) управление:
) автоматическое открытие/закрытие клапана сброса газа
на УУГ;
дистанционное управление с рабочего места оператора:
) дистанционное управление насосами из операторной;
) дистанционное управление электроприводными
задвижками;
− технологические защиты:
) автоматический останов насосов при превышении
(понижении) заданных предельных значений давления на приеме (выкиде) насосов;
) автоматический останов двигателей насосов Н-1/1, 2,
3 при снижении давления уплотнительной жидкости для сальников насосов;
) автоматический останов насосных агрегатов при
загазованности в блоке выше 40% от нижнего предела взрываемости.
− информационные функции включают в себя:
) сбор и первичную обработку (аналого-цифровое
преобразование, измерение, масштабирование и др.) информации о технологическом
процессе и технологическом оборудовании;
) сбор информации о состоянии и работе исполнительных
механизмов, схем автоматического управления, регулирования и технологической
защиты;
) распознавание предаварийных и аварийных ситуаций;
) отображение информации на экране монитора;
) регистрацию контролируемых параметров и событий.
.1.3
Требования к комплексу технических средств (КТС)
Комплекс технических средств (КТС) автоматизированной
системы управления должен быть достаточным для выполнения всех технических
требований, изложенных выше.
В КТС должны использоваться унифицированные, серийно
выпускаемые средства, опробованные в промышленной эксплуатации. Любое из
технических средств должно допускать замену его аналогичным средством без
каких-либо конструктивных изменений или регулировки в остальных устройствах.
Конфигурация технических средств не должна ограничивать возможность расширения
системы.
КТС должен обеспечить построение двухуровневой
иерархической системы и включать в себя:
) микропроцессорные программируемые логические
контроллеры (РLС);
) рабочую станцию оператора на базе персонального
компьютера с монитором, клавиатурой и печатающим устройством;
) устройство передачи информации;
) источники бесперебойного электропитания.
Контроллер должен обеспечивать функции:
) ввода-вывода, преобразования и нормирования
сигналов;
) обмен данными с рабочей станцией;
) автоматического управления;
) исполнение дистанционных команд с рабочей станции;
) локальной диагностики и самодиагностики.
Модули ввода аналоговых сигналов должны обеспечивать
ввод унифицированных токовых сигналов (4÷20 мА) с полным гальваническим
разделением цифровой части от аналоговой. Дискретные модули должны обеспечивать
полное гальваническое разделение внешних цепей от внутренних. Модули ввода
дискретных сигналов должны обеспечивать ввод сигналов 12÷24В током не более 5 мА/сигнал. Модули
вывода дискретных сигналов должны обеспечивать ток до 5 А при напряжении до
~220В.
Обмен информацией между контроллерами и компьютером
должен производиться через последовательный порт RS-232 или RS-485.
Компьютер должен обеспечивать функции накопления и
обработки информации, операторского интерфейса и дистанционного управления.
Программное обеспечение должно быть достаточным для
выполнения всех технических требований, изложенных в настоящем техническом
задании.
Программное обеспечение системы должно включать в
себя:
) операционную систему рабочей станции оператора;
) пакет операторского интерфейса.
2.1.4
Комплекс технических средств
Датчики температуры ТСМ-055/1, 055/2, 055/3-ИП6, ТСМУ-205Ех.
Техническая характеристика:
1) измеряемая среда: сыпучие вещества, газы и жидкости (неразрушающие
материал защитной арматуры термозонда - сталь 12X18H10T);
2) диапазон измеряемых температур:
для ТСМ-055/1, 005/2, 055/3-ИП-6: - 50 ÷ 150°С;
для ТСМУ-205Ех: 0 ÷ 180°С
3) электронный измерительный преобразователь встроен непосредственно в
головку датчика температуры;
4) выходной сигнал постоянного тока: 4÷20 мА;
Термопреобразователи с унифицированным выходным сигналом предназначены
для преобразования значения температуры различных (как нейтральных, так и
агрессивных) сред в унифицированный токовый выходной сигнал. Применяется в
системах автоматического контроля и регулирования температуры.
Взрывозащищенные термопреобразователи применяются на промышленных
предприятиях и технологических объектах с зонами, где возможно образование
взрывоопасных смесей категорий IIA, IIB и IIC и групп взрывобезопасности
Т1...Т6> [3].
Блок управления БУЭП-1.
Предназначен для контроля состояния и регулирования степени открытия
технологических клапанов и задвижек, снабженных однофазными и трехфазными
исполнительными электроприводными механизмами.
Прибор работает под управлением регуляторов с выходным токовым сигналом
0…5 мА или 0…20 мА. Блок устанавливается на переднюю панель щита автоматики
[4].
Датчики давления серии Метран-100.
Предназначены для работы в системах автоматического контроля,
регулирования и управления технологическими процессами и обеспечивают
непрерывное преобразование в унифицированный токовый и/или цифровой на базе
HART-протокола выходной сигнал дистанционной передачи следующих измеряемых
величин:
избыточного давления - Метран-100-ДИ;
абсолютного давления - Метран-100-ДА;
разности давлений - Метран-100-ДД;
Измерение среды: жидкости, пар, газ, в том числе, газообразный кислород и
кислородосодержащие газовые смеси.
Диапазоны измеряемых давлений:
минимальный 0-0,04 кПа;
максимальный 0-100 МПа;
Основная погрешность: ±0,1%, ±0,15%, ±0,25%, ±0,5%.
Степень защиты от пыли и воды IР65.
Выходные сигналы:
− аналоговый сигнал постоянного тока 4-20 мА, 0-5мА, 0-20мА.
Для датчиков исполнения Ех - только 4-20 мА;
− аналоговый сигнал постоянного тока 4-20 мА, с наложенным
цифровым сигналом в стандарте HART;
Возможности датчика:
) контроль текущего значения измеряемого давления;
) контроль и настройка параметров датчика;
) установка "нуля";
) выбор системы и настройка единиц измерения;
) настройка времени усреднения выходного сигнала (демпфирование);
) перенастройка диапазонов измерения, в том числе на нестандартный (25:1,
16:1, 10:1);
) настройка на "смещенный" диапазон измерения;
) выбор зависимости выходного сигнала от входной величины:
(линейно-возрастающая, линейно-убывающая, пропорциональная корню квадратному
перепада давления);
) калибровка датчика;
) непрерывная самодиагностика;
) тестирование и управление параметрами датчика на расстоянии;
) защита настроек от несанкционированного доступа;
Изготовитель - Концерн «Метран», г. Челябинск [3].
Манометр
сигнализирующий ДМ-2005Ех.
Манометр сигнализирующий предназначен для измерения избыточного и
вакуумметрического давления различных сред и управлений внешними электрическими
цепями от сигнализирующего устройства прямого действия. Прибор является
взрывозащищенным с видом защиты “взрывонепроницаемая оболочка” и имеет
маркировку по взрывозащите 1ЕхdII
Вт4, а по защищенности от воздействия окружающей среды прибор имеет исполнение
защищенное от воздействия агрессивных сред.
Технические характеристики:
) контролируемая среда - жидкость, газ, пар;
) диапазон показаний - от 1 до 1.6, 2.5, 4, 6, 10, 16, 25, 40
кгс/см2;
) класс точности - 1.5;
) сила тока - до 1А;
) параметры сигнализирующего устройства - 24,27,36,40,110,220В -
для цепей постоянного тока;
) предел допускаемой основной погрешности - 2.5% от диапазона
показаний - для приборов со скользящими контактами, 4% - для приборов с
магнитным поджатием контактов;
) прибор устойчив к воздействию температуры окружающего воздуха от
-50 до +60°С и относительной влажности до 98% при 35°С и более низких
температурах конденсации влаги;
) прибор устойчив к воздействию вибрации частотой 5-35Гц с
амплитудой смещения 0.35мм [3].
Газоанализатор СТМ-10.
Принцип действия сигнализаторов - термохимический, основанный на
измерении теплового эффекта от окисления горючих газов и паров на каталически
активном элементе датчика. Газоанализатор выдает сигнал о предельной
концентрации.
Характеристики прибора СТМ-10
Сигнальная концентрация - 40% от предельно допустимой
Погрешность прибора ± 5%
Время срабатывания сигнализации при концентрации смеси в 1.6 раза больше
сигнальной - не более 15 с.
Время непрерывной работы сигнализаторов без технического обслуживания и
ручного корректирования - 720 часов.
Выходной токовый сигнал - 4-20 мА.
Сопротивление нагрузки не более 250 Ом
Питание переменным напряжением - 220 В
Частота тока - 50 Гц
Наработка на отказ 30 000 часов
Контроль среды желательно осуществлять в местах возможных утечек или
зонах вероятного скопления газов.
Сигнализатор уровня ультразвуковой СУР - 4.
Сигнализатор предназначен для контроля уровня различных жидкостей, в том
числе сжиженных газов, сильнопенящихся и кипящих жидкостей, в одной или двух
точках [7].
Стойкость к агрессивным средам определяется применяемым материалом,
контактирующим с агрессивной средой - нержавеющая сталь 12Х18Н10Т.
Длина чувствительного элемента: от 0,25 м до 4 м.
Рабочая температура среды - от минус 45 до +100 °С
Рабочее давление - до 4 МПа.
Вторичный преобразователь устанавливается на переднюю панель щита
автоматики.
Датчик уровня ультразвуковой ДУУ - 3.
Назначение датчика: измерение уровня, уровня раздела сред, температуры и
давления различных многофазных жидкостей [7].
Стойкость к агрессивным средам определяется применяемыми материалами,
контактирующими с агрессивной средой: нержавеющая сталь 12Х18Н10Т,
фторопласт-4.
Рабочая температура среды - от минус 45 до + 65 °C (по специальному
заказу возможно изготовление датчиков с максимальной рабочей температурой 120
°C).
Рабочее давление - до 2 МПа (жесткий датчик), до 0,15 МПа (гибкий
датчик).
Плотность сред от 600 до 1500 кг/м3.
Погрешность измерения уровня для разных исполнений датчиков: ±1 мм, ±5
мм.
Погрешность измерения температуры: ±2 °C (-45 ÷
-10 °C и +85°C ÷
+95°C); ±0,5 °C (от -10
°C ÷
+85 °C).
Погрешность измерения давления ±1,5 %.
Влагомер AGAR -
многоцелевой двухфазный (жидкостно-жидкостной) монитор, предназначенный для
оперативных измерений водно-нефтяных смесей с обводненностью от 0 до 100% и
контроля за соотношением содержания органической и неорганической фазы.
Влагомер позволяет проводить замеры по всему диапазону изменений от 0 до
100%, независимо от того, какая жидкость является непрерывной фазой. На
точность измерению не влияют соленость, плотность, вязкость, температура
жидкости, а также скорость обтекания анализируемого потока.
Вся электроника находится внутри взрывозащищенного корпуса (маркировка EEx
d ia IIB T4), либо может быть разделена на первичный блок, располагающийся на
корпусе влагомера, и блок обработки данных (DAS). Такой блок поставляется в
пыле- и влагозащищенном корпусе (IP65). Данные от сенсора передаются на
вторичный блок по кабелю (формат связи RS485) длиной до 1000 м.
Основные технические характеристики:
рабочий диапазон от 0 до 100% Абсолютная погрешность±1%;
рабочее давление - 20 - 100 бар. (под заказ выше);
рабочая температура - 0-250°С;
напряжение питания - 220 В АС или 12/24 В DC;
потребляемая мощность - не более 35 Вт.
Корунд - 20И - прибор предназначен для приема, анализа и отображения
извещений, поступающих по шлейфу сигнализации от электроконтактных и
бесконтактных пожарных и охранных извещателей. Прибор формирует тревожные извещения
на пульт централизованного наблюдения. Кроме этого прибор может формировать
управляющие импульсы - включение или выключение исполнительных устройств.
Питание: 220 В, 50 Гц. Напряжение питания от резервного источника: 12 В
(DC). Потребляемый ток: 50 мА. Рабочий диапазон температур: от -30°С до 50°С.
Габаритные размеры: 150 х 230 х 85 мм. Вес: 2,5 кг.
2.2 Выбор и
обоснование RTU, MTU
2.2.1 Функции
системы и обоснование выбора контроллера
Можно выделить несколько групп контроллеров, отличающихся друг от друга
количеством точек ввода/вывода, объемом памяти, предоставлением различных
сетевых протоколов, по размеру и т.д.
Существуют малые программируемые контроллеры Small logic controllers (например, SLC500).
Есть также такие контроллеры, как контроллер фирмы Octagon Systems (США). Архитектура РС и лежащая в ее основе шина ISA
стали безусловным стандартом в промышленности. Octagon выбрала этот стандарт и
использовала его в качестве платформы для того, чтобы предоставить самые
передовые достижения, существующие сегодня на рынке встраиваемых компьютеров.
Среди отечественных представителей есть станция управления «Горизонт»,
предназначенная для управления различными контурами, расположенными во
взрывоопасных зонах классов В-1а, В-1г.
Среди большого разнообразия контроллеров по соотношению цена-качество, а
также условиям гарантийного обслуживания и поддержки был выбран контроллер
семейства SLC 500. Это семейство малых программируемых контроллеров,
построенное на двух аппаратных модификациях: фиксированный контроллер с опцией
расширения при помощи 2-x слотного шасси, или модульный контроллер до 960 точек
Вв/Выв, программирование в режиме ONLINE, и переключатель для выбора одного из трех режимов функционирования (RUN, PROGRAMM, REMOTE ) [16].
Программируемые контроллеры SLC 500 имеют встроенный порт сети DH-485,
обеспечивая тем самым программную поддержку и мониторинг.
В состав процессора SLC 5/03 включен канал RS-232, который обеспечивает
асинхронный последовательный коммуникационный интерфейс данных с терминальными
устройствами.
Иерархически система управления разделяется на два уровня. Первый уровень
управления реализован на базе технологического микропроцессорного управляющего
контроллера модели SLC 5/03 фирмы
Allen-Bradley, который отвечает требованиям по быстродействию и имеет полный
набор команд (в том числе и ПИД-инструкции).
Предлагаемый программируемый логический контроллер модели SLC 5/03 обеспечивает выполнение
следующих функций:
) постоянный контроль и отображение технологических параметров;
) автоматическое и дистанционное управление насосными агрегатами и
электроприводными задвижками;
) осуществляет ПИД регулирование для поддержания оптимального режима
технологического процесса;
) осуществляет функции противоаварийной защиты и сигнализации.
Второй уровень управления, реализованный на базе рабочей станции (ПЭВМ),
выполняет следующие основные функции:
) обеспечение непрерывного круглосуточного обмена информацией с
контроллером по проводной связи;
) выполнение обработки полученной информации, формирование предыстории и
текущих событий;
) формирование массивов информации по заданным параметрам для последующей
визуализации в виде графиков (трендов);
) отображение полученной информации в форме таблиц или на мнемосхемах;
) формирование и печать отчетно-учетных документов.
В дополнение к гибкости конфигурирования программируемые контроллеры SLC
500 имеют встроенный порт сети DH-485, обеспечивая тем самым программную
поддержку и мониторинг.
В состав процессора SLC 5/03 также включен канал RS-232, который
обеспечивает асинхронный последовательный коммуникационный интерфейс данных с
терминальными устройствами. Любой программируемый контроллер SLC 500 в
сочетании с модулем непосредственной коммуникации (DCM), модулем сканера (SN)
или модулем распределенного сканера (DSN) для реализации распределенного
ввода/вывода может быть интегрирован в сеть дистанционного ввода/вывода
Allen-Bradley 1771 Remote I/O.
Семейство SLC 500 предлагает широкий выбор модулей дискретного В/В,
которые позволяют строить системы управления с минимальными затратами. Наличие
32-канальных модулей В/В снижает, кроме того, требования к монтажному
пространству. Все дискретные и специализированные модули сертифицированы в
соответствии со стандартами индустриальных приложений UL и CSA, а большинство
из них одобрено для использования в условиях окружающей среды.
Модульные контроллеры SLC 500 предлагают дополнительную гибкость
конфигурирования системы, более мощные процессоры и большую емкость
ввода/вывода.
В качестве RTU выбран
контроллер SLC500. Контроллер имеет модульную
конструкцию. Он находится в операторной.
На одном шасси распложены 12 модулей ввода-вывода, из которых один - 3
модуля цифровых входов (1746-IB32,
1746-IB8) [12], 4 модуля аналоговых входов
(1746-NI8) [13], 3 модуля аналоговых выходов
(1746-NO4I), 2 модуля цифровых выходов (1746-OB16). Выбран процессор SLC 5/03 (1747-L531), поддерживающий сеть DH485. Все данные по модулям
ввода/вывода представлены в таблице Г.1.
Питание осуществляется от сети переменного тока 220 В.
.2.2 Описание
алгоритма работы контроллера
Система автоматического управления дожимной насосной станции осуществляет
следующие функции:
− показание текущих значений основных технологических
параметров;
1 показание текущего состояния
технологического оборудования;
2 формирование управляющих воздействий
на основе проверки показаний датчиков;
3 непрерывное управление
технологическим процессом.
Входные сигналы (токовый сигнал 4-20 мА - для аналоговых сигналов, лог.
“1” или лог. “0” - для дискретного сигнала) поступают с датчиков непосредственно
в контроллер. Текущие значения входных сигналов сравниваются с соответствующими
им номинальными значениями и, если текущее значение сигнала находится в
допустимых пределах, то программа опрашивает следующий датчик. Если значение
сигнала вышло за контрольные границы, то происходит сравнение этого значения с
заранее введенными уставками и после этого возможны следующие выходные
действия:
4 управляющее воздействие (открытие/
закрытие задвижки) на объекте;
5 сообщения на пульт оператора текущих
значений сигналов;
6 сообщения о превышении/понижении
значений входных сигналов от номинальных;
7 выработка защитных действий при
аварийной ситуации в ходе технологического процесса.
В разрабатываемом проекте на программу контроллера возложено выполнение
следующих функций:
- опрос аналоговых входов и преобразование результата работы
АЦП в инженерные (технологические) величины;
- выполнение алгоритмов управления агрегатами дожимной насосной
станции;
- выдача аварийных сигналов на ЭВМ верхнего уровня;
- автоматическое включение/выключение приточно-вытяжной
вентиляции при достижении установленных норм загазованности.
В приложении И представлен общий алгоритм работы программы и алгоритмы
подпрограмм. Рассмотрим эти алгоритмы более подробно.
При подаче питания на контроллер происходит инициализация аналоговых
модулей ввода/вывода и установка начальных значений некоторых параметров.
На следующем шаге выполняется опрос аналоговых входов и преобразование
результата АЦП входного модуля в необходимую инженерную величину. Данный этап
реализован циклическим образом, используя косвенную адресацию.
Далее производиться переход к подпрограмме опроса датчиков. В случае
сигнализации одного из этих датчиков происходит переход к нужной подпрограмме,
в зависимости от сигнала.
Следующей по алгоритму является подпрограммы регулирования процесса в
сепараторах. В них сначала проверяется не вышли за пределы допустимых значений
величины давления и уровня жидкости. Если да, то выставляется бит аварии и
затем дополнительно насосы либо включаются, либо выключаются. Если все в норме,
то производится ПИД-регулирование.
Далее происходит переход на подпрограммы управления насосами. В
зависимости от условий система либо останавливает насосы, либо их запускает,
либо ничего с ними не делает.
Помимо указанных действий программы необходимо также отметить, что
управление ДНС можно производить в ручном режиме, обращаясь непосредственно к
ячейке управления с ЭВМ оператора.
.2.3 Рабочее
место оператора
В качестве MTU выбран
персональный компьютер на базе процессора Pentium-IV,
который включает в себя системный блок, монитор, клавиатуру, ручной манипулятор
"мышь" и принтер. Операционная система Windows 2000/NT,
наличие программного обеспечения: Trace Mode 6. Данный
компьютер взаимодействует с контроллером с помощью сети DH485. Следовательно, оператор может
наблюдать и управлять процессом. Для печати сводок, отчетов и другой
документации имеется принтер.
2.3
Операторский интерфейс. HMI
Человеко-машинный интерфейс реализован посредством программы Trace Mode 6.
Для данного технологического процесса HMI включает в себя 9 экранов. Главный экран представляет
собой технологическую схему, состоящую из следующих областей: УПОГ, блока
насосов, РВС, блока, включающего в себя сепараторы С-1/1,2, С-2, газосепаратор
Г-1.
При нажатии соответствующей кнопки происходит переход на следующий экран,
который представляет собой увеличенное изображение соответствующей области.
На основном экране расположена кнопка "Тренды". При ее нажатии
происходит выход на экран, где можно просмотреть в графическом виде изменение
уровня в сепараторах.
На остальных экранах изменение аналоговых величин можно проследить с
помощью цифрового дисплея.
Также имеется кнопка «Тревога». При ее нажатии осуществляется переход на
экран, где отображается предаварийное состояние, критические пределы, авария
соответствующего характера, произошедшая в каком-либо из блоков.
Каждый экран представляет собой увеличенное изображение какой - либо
области.
Главный экран представляет собой технологическую схему, на цифровых
дисплеях отображаются параметры жидкости, газа на выходе ДНС, такие как расход,
давление и температура.
На экране площадки УПОГ на цифровом дисплее отображается температура
жидкости на входе ДНС, имеется возможность в ручном режиме работы
открыть/закрыть задвижку путем нажатия соответствующей кнопки, при этом, если
задвижка открыта ее цвет зеленый, закрыта - красный. Задвижка является битовым
индикатором, то есть при нажатии кнопки «Открыть» осуществляется прямая посылка
единицы в канал zadv, при нажатии
кнопки «Закрыть» нуля.
На экране площадки сепарации газа представлен объект газосепаратор.
С помощью гистограммы показан динамически изменяющийся уровень газа, на
цифровом дисплее отображаются такие параметры как, уровень, давление,
температура, а также выходные параметры газа на факел и ЦПС. Достижение уровня
критического значения показано в виде цветовой сигнализации красного цвета.
Давление в газосепараторе регулируется с помощью регулирующего клапана, степень
его открытия можно наблюдать на экране. Возможен переход из ручного режима
работы в автоматический, путем нажатия кнопки. В автоматическом режиме работы
проценты открытия регулирующего клапана задается автоматически, в ручном - при
помощи ползунка на шкале. Режим работы в данный момент отображается на экране в
виде текста.
На экране площадки сепарации нефти представлены 3 сепаратора, сепараторы
С-1/1, С-1/2 - являются сепараторами первой ступени, С-2/1 - второй ступени.
На всех сепараторах с помощью гистограммы показан изменяющийся уровень
жидкости, на цифровых дисплеях отображаются уровень, давление, температура, как
и на предыдущем экране возможен выбор режима работы.
На экране резервуарного парка представлен резервуар с задвижками на входе
и выходе.
При открытой входной задвижке с помощью «бегущей дорожки» показано
наполнение резервуара, при открытой выходной задвижки - опустошение. В цифровом
виде на дисплее показано изменение уровня жидкости.
На экране площадки дренажной емкости представлена емкость с входными и
выходными задвижками, анимация аналогична резервуарному парку и показана
сигнализация предельных значений уровня.
На экране площадки насосов представлены 3 насоса, выбор работы которых
зависит от того, какое количество жидкости необходимо перекачать. Пуск и
останов насосов осуществляется вручную путем нажатия кнопки «старт», «стоп»,
при этом отображается текущее состояние насоса путем сигнализации. На цифровых
дисплеях отображается давление на приеме и на выкиде насоса.
На трендах отображается изменение уровня в сепараторах. В отчет тревог записывается
предаварийное, нормальное, аварийное состояние каких-либо объектов.
2.3.1
Разработка FBD - программ
Язык функциональных блоков (Техно FBD со встроенным языком Техно LD,
Ladder Diagram) является визуальным языком программирования алгоритмов. Программа,
созданная на этом языке, называется FBD-программой.
Для разработки FBD-программ в редакторе базы каналов предусмотрены два
окна - FBD программы и LD программы. Для входа в первое из них нужно выполнить
команду FBD программы меню Окна или нажать сочетание клавиш ALT-3 или нажать ЛК
на иконке панели инструментов.программа имеет имя и комментарий. Эти атрибуты
используются для ее идентификации и определения доступа к ней с различных узлов
проекта и настраиваются в диалоге FBD-программа. Он выводится на экран перед
входом в окно редактирования FBD-программ.
Имя и комментарий - эти два атрибута используются для идентификации
программы. Имя может включать в себя до 8 символов, а комментарий - до 128. В
имени программы не могут использоваться служебные символы (например,
"*"). Имя программы не может начинаться с цифры.
Имя FBD-программы используется для ссылок на нее. Комментарий - это
дополнительная информация о назначения программы. Он выводится во всех
диалогах, ссылающихся на FBD-программы [14].
Компоненты FBD-программ:
переменная
Переменные FBD-программы могут быть внутренние или внешние. Внешние
переменные называются аргументами. Суммарное количество переменных в одной
программе не может превышать 254.
Каждая переменная имеет числовой индекс, который используется при ссылках
на нее. Индексы переменных выводятся радом с аргументами и константами в
диалоге Реквизиты при подключении программы к каналу. Они могут быть изменены
при редактировании программы.
функциональный блок
Элементарным звеном FBD-программ является функциональный блок.
Блок - это графическое изображение вызова одной из функций. Это могут
быть либо стандартные, встроенные в систему функции, либо разработанные
пользователем. Функциональные блоки, встроенные в систему, сгруппированы в
несколько разделов.
входы и выходы блока
Каждый блок в зависимости от выполняемой им функции имеет определенное
количество входов и выходов. Входы всегда расположены слева, а выходы - справа.
Вход блока может быть связан с переменной или константой, а может быть свободным.
Назначение входов и выходов блока определяется его функцией. Исключением
является первый вход. Он всегда управляет пересчетом блока, а остальные -
функциональными. Эти входы и выходы блоков имеют обозначения, включающие в себя
до трех символов.
В режим эмуляции программы рядом с каждым входом и выходом выводится его
значение. При этом для входов выводимые значения заменяют их обозначения.
Все разработанные программы данного проекта представлены в приложении Е.
Основная цель создания FBD-программ
- возможность эмуляции реальных сигналов.
Подпрограммы генерации сигналов состоят в основном из двух блоков:
генератора (GSIN) и масштабирования (SCALE), в некоторых подпрограммах
присутствует блок округления до сотых (NDGT).
Блок GSIN
Этот функциональный блок генерирует синусоидальный сигнал единичной
амплитуды. Период колебаний (в секундах) задается значением входа PT. Во всех
подпрограммах его значение задается равным 100.
Блок SCALE
Выход этого блока рассчитывается по формуле: Q = INP * MUL + ADD . На
вход INP подается сигнал с генератора GSIN. Значение MUL принимается исходя из того в каких пределах должен
изменяться сигнал, чаще всего он равен MUL = (MAX+MIN)/2, где MAX - максимальное значение сигнала, MIN - минимальное значение сигнала. Вход
ADD определяется как MAX - MUL.
Блок NDGT
На выходе Q формируется округленное значение входа INP. Значение входа
NDG задает точность округления:
- до сотен;
- до десятков;
- до целых;
- до первого разряда после запятой;
- до второго разряда после запятой;
- до третьего разряда после запятой;
- до четвертого разряда после запятой.
В разработанных программах NDG =
2.
Подпрограммы ПИД-регулирования представлены также в приложении Е. В нее
входят следующие блоки: (-), PID, DZONE, SEL.
Блок (-) вычисляет рассогласования регулируемой величины с заданием
(входы AS и AD соответственно). Величина рассогласования подается на вход INP
блока DZONE, который реализует функцию зоны нечувствительности. Величина зоны
нечувствительности подается на вход DLT. Выход блока DZONE подается на вход INP
блока, реализующего вычисление величины управляющего воздействия. Для
переключения контура на ручной режим используется функциональный блок SEL. На
его вход IN0 подается выход блока, а на вход IN1 - величина ручного управления
выходом регулятора. Управление переключением режимов осуществляется входом IG
блока SEL.
3. Web - интерфейс
3.1 Понятие Web - интерфейса
orld Wide Web (сокращенно w3,www, web) - "Всемирная Паутина" - система для
доступа к гипертекстовой и гипермедиа-информации. Изначально проект www зародился в CERN, европейском центре
физики высоких энергий в 1990, но со временем перерос рамки сообщества
ученых-физиков. Первые программы, демонстрирующие работу системы, были
закончены в 1992 году для компьютера NeXT.
Система World Wide Web связана с информационно-поисковыми системами и
глобальными сетями. По существу, web
представляет собой результат применения возможностей доступа к территориально-
распределенной информации для создания глобальных гипертекстовых и мультимедиа
информационно-поисковых систем (ИПС). Возможности доступа к
территориально-распределенной информации обеспечивает для web всемирная сеть Internet и те
локальные компьютерные сети, где Web-средства используются (в режиме intranet). Наследуя базовые черты ИПС,
web-система в основном развивается как
хранилище слабоструктурированной, разноплановой и часто несогласованной
информации и тем отличается от баз данных, где информация структурирована и
взаимосвязана.
И в Internet и в intranet
web представляет собой сеть узлов,
содержащих гипермедиа-документы и связи, позволяющие из одного документа
ссылаться на другие, размещенные как на том же узле, так и на других [15].
3.2 Обработка
данных по web - технологии клиент-сервер
Технология клиент-сервер является реализацией распределенной обработки
данных. В системе архитектуры клиент-сервер обработка данных разделена между
компьютером-клиентом и компьютером-сервером, связь между которыми происходит по
сети. Это разделение процессов обработки данных основано на группировании функций.
Как правило, компьютер-сервер баз данных выделяется для выполнения операций с
базами данных, а компьютер-клиент выполняет прикладные программы.
Основная функция компьютера-клиента состоит в выполнении приложения
(интерфейса с пользователем и логики представления) и осуществлении связи с
сервером, когда этого требует приложение. Компьютер-клиент может быть как
простой машиной типа персонального компьютера (ПК) с процессором 286 и
операционной системой DOS, так и мощной рабочей станцией с многозадачной и
многопользовательской операционной системой типа UNIX. Таким образом, выбор
компьютера, операционной системы, оперативной и дисковой памяти, другого
оборудования определяется требованиями приложения. В качестве программы-клиента
обычно выступает браузер.
Главная функция компьютера-сервера заключается в обслуживании
потребностей клиента. Одно из важных требований к серверу - операционная
система, в среде которой, размещен сервер, должна быть многозадачной (и,
желательно, но не обязательно, многопользовательской). Сервером, как правило,
выступает программа-сервер протокола обмена гипертекстовой информацией HTTP,
которая отвечает на запросы клиентов.
Преимущества технологии клиент-сервер:
− независимость от платформ: доступ к разнородным сетевым
средам, в состав которых входят компьютеры разных типов с различными
операционными системами.
− большее число пользователей.
− относительно низкие затраты на внедрение и эксплуатацию;
− высокая способность к интеграции существующих гетерогенных
информационных ресурсов корпораций;
− повышение уровня эффективности использования оборудования
(сохранение инвестиций).
− прикладные программные средства доступны с любого рабочего
места, имеющего соответствующие права доступа;
− минимальные затраты на настройку и сопровождение клиентских
рабочих мест, что позволяет реализовывать системы с тысячами пользователей
(причем многие из которых могут работать за удаленными терминалами).
3.3 Протокол HTPP
Transfer Protocol (HTTP) - это протокол, который клиенты и серверы www используют для общения между собой.
Он является основой web.
Все HTTP-транзакции имеют один общий формат. Каждый запрос клиента и
ответ сервера состоит из трех частей: строки запроса (ответа), раздела
заголовка и тела.
Сервер отвечает на запрос клиента. Если запрос клиента успешен, то сервер
посылает затребованные данные. Это может быть копия файла или документ
сформированный "на лету". Если запрос клиента удовлетворить нельзя,
то сервер передает дополнительные данные в виде удобного для человека
разъяснения причин, по которым сервер не смог выполнить запрос.
В HTTP 1.0 после передачи сервером затребованных данных следует
разъединение с клиентом и транзакция завершается. В HTTP 1.1 сервер по
умолчанию не разрывает соединение, и клиент может посылать другие запросы. Это
позволяет сэкономить время и затраты клиента, которому не приходится заново
соединяться с тем же сервером. Таким образом, в HTTP 1.1 транзакция может
циклически повторяться, пока клиент или сервер не закроет соединение явно.
3.4
Организация Web - интерфейса в инструментальном
пакете Trace Mode 6
Данные сохраняются в базу данных на глобальном уровне. Для реализации
обмена с базами данных по ODBC используются отдельные каналы. При изменении
значения параметра формируется SQL-запрос
к удаленной базе данных для записи нового значения параметра. При формировании
с помощью канала запроса, содержащего команду INSERT INTO, анализируется
наличие после нее ключевого слова VALUES. Если оно присутствует, то
осуществляется передача в базу заданных при нем значений. При формировании
запроса имена этих каналов используются в качестве имен полей базы, а величины
реальных значений вставляются в запрос после ключевого слова VALUES.
На глобальном уровне организован сервер базы данных и web-сервер с установленным в нем модулем
PHP версии 4.1. PHP - это язык написания
сценариев, внедренный в HTML. Многое из синтаксиса заимствовано из C, Java и
Perl, с добавлением специфичных для PHP возможностей. Задача языка состоит в
том, чтобы дать возможность Web-разработчикам легко и быстро создавать
динамично изменяемые html-страницы.
При запросе из глобальной сети internet происходит аутентификация, после чего пользователю выдается
страница с внедренным в нее элементом Flash, который представляет собой копию мнемосхемы оператора. Далее
пользователь задает период времени за который необходимо посмотреть развитие
процесса. После того как данные о периоде передались серверу, php-скрипт анализирует их, соединяется с
сервером базы данных и специальными запросами находит в базе данные о
технических параметрах процесса. Далее php-скрипт преобразует эти данные в xml-документ, для того чтобы элемент Flash мог их обработать и загрузить для
отображения на страничке [14].
После Flash-элемент анализируя полученный xml-документ специальным алгоритмом
находит эти данные и присваивает соответствующее значение соответствующему
графическому элементу на экране. И обрабатывает данные одного момента времени
как один кадр из последовательности кадров всей временной шкалы. В итоге на
экране пользователя можно проследить за технологическим процессом на мнемосхеме
как он протекал во времени. Это позволяет отследить моменты аварийной ситуации
и предшествующее им развитие событий наглядно на схеме. Пользователь может
управлять скоростью отображения кадров. Подключаемый модуль для отображения flash-анимации для Интернет-браузера можно
загрузить с официального сайта в любое время. Flash Player (подключаемый модуль) создан так, чтобы быстро загружаться
даже при низкой пропускной способности соединения. Flash почти повсеместно принят как стандарт для векторной
анимации в приложения сети. Исходя из всего вышесказанного, можно заключить,
что доступ к мнемосхемам через web-итерфейс
для просмотра протекания технологического процесса можно осуществить из любого
места сети, где бы не находился пользователь. Структурная схема организации Web - интерфейса представлена в
приложении К.
4. Расчет
надежности
4.1 Общие
положения
Надежность - свойство объекта сохранять во времени в установленных
пределах значение всех параметров, характеризующих способность выполнять
требуемые функции в заданных режимах и условиях применения, а так же после
ремонта, хранения и транспортировки.
Совокупность элементов, имеющих единое упорядоченное функционирование и
развитие, называют системой.
Надежность является комплексным свойством объекта, которое включает 3
основных и несколько дополнительных составляющих.
К основным составляющим понятия надежности относят:
безотказность - свойство объекта сохранять работоспособное состояние в
течение некоторого времени или некоторой наработки (наработка более широкое
понятие, чем время безотказной работы), так как наработка может измеряться как
в единицах времени, так и в единицах производимой продукции;
долговечность - свойство объекта сохранять работоспособность до
наступления предельного состояния при установленной системе технического
обслуживания и ремонта (работоспособность - состояние объекта, при котором
значение всех параметров, характеризующих способность выполнять заданные
функции, соответствует заданным нормативам), предельное состояние объекта, при
котором его дальнейшее применение по назначению не допустимо и восстановление
нецелесообразно;
ремонтопригодность - свойство объекта быть приспособленным предупреждать
и обнаруживать причины возникновения отказов, а так же восстановление
работоспособности или ее поддержание путем технического обслуживания и ремонта.
Отказ работоспособности - переход объекта одного уровня работоспособности
на другой более низкий.
Отказ функционирования - переход на более низкий уровень
функционирования.
Отказы бывают полными и частичными. При полном отказе объект не может
выполнять ни одну из предписанных ему функций, при частичном - некоторые из
функций могут сохраняться.
Отказы бывают простые и сложные. Простой отказ устраняется путем простого
восстановления или его замены. При сложном отказе выход из строя хотя бы одного
элемента приводит к необходимости настройки всей системы или ее объектов.
В рабочем состоянии объект может находиться в режимах: нормальном,
аварийном, послеаварийном. Нерабочее состояние включает в себя состояние
предупредительного ремонта, аварийного ремонта, аварийного простоя и зависимого
простоя.
Устойчивость - способность объекта переходить от одного устойчивого
объекта к другому при различных возмущениях. Различают:
статическую - объект устойчиво переходит в другое состояние при малых
возмущениях;
динамическую - при больших возмущениях.
Живучесть - свойство системы противостоять крупным возмущениям не
допуская их цепочного развития и массового отказа двигателя.
Безопасность - свойство объекта не создавать опасности для людей и
окружающей среды во всех возможных режимах работы и при аварийных ситуациях.
Мера надежности - определенный уровень показателей надежности, который
позволяет вести производственный процесс с малой вероятностью отказа.
В процессе разработки системы автоматизированного контроля и управления,
расчёт необходимого уровня надежности системы производиться с учетом следующих
обстоятельств:
АСУ ТП является многофункциональной системой, в состав которой входят
технические средства и обслуживающий персонал (в выполнении той или иной
функции могут использоваться технические средства и оперативный персонал);
надежность АСУ ТП зависит от особенностей программ и алгоритмов,
реализуемых техническими средствами и оперативным персоналом;
оценка надежности производится с учетом надежности только технических
средств.
При оценке надёжности разрабатываемой системы АСУ ТП, рассматривают
работу системы как некоторую функцию. При этом отказом функции является полная
потеря способности разработанной системы выполнять эту функцию или нарушение
хотя бы одного из требований, предъявляемых к качеству выполнения этой функции,
возникающее при заданных условиях эксплуатации АСУ ТП и нормально
функционирующем технологическом объекте управления [16].
На стадии проектирования системы АСУ ТП, рассматриваются следующие
показатели надёжности:
- наработка на отказ (Ti от часов до лет);
- время восстановления работоспособности (Tв);
- время установленного функционирования (tI);
- средний ресурс наработки до предельного состояния (tI);
- гамма % ресурс - наработка, в течение которой объект
достигает предельного состояния с вероятностью g (tRg);
- средний срок службы (tk);
- коэффициент планового применения (Кпп);
- коэффициент готовности (Кг);
- коэффициент оперативной готовности (Ког);
- коэффициент технического использования (Кти);
- параметр потока отказа (wед.врем.);
- средняя частота отказов (интенсивность отказов) (l1/ед.врем.);
- вероятность отказов (Q(t);q);
- вероятность безотказной работы (Р(t);р);
- частота аварии (Lк).
4.2 Методика
расчета показателей надежности
Расчёт показателей надёжности производится в следующей
последовательности:
определяется перечень функций системы, к которым предъявляются требования
с точки зрения надежности;
определяется состав технических средств, участвующих в реализации функций
системы;
строится структурно-логическая схема расчета надежности, представляющая
собой последовательно-параллельное соединение технических средств, участвующих
в реализации функций системы;
для каждого технического средства, участвующего в расчёте надёжности
определяются следующие параметры как поток отказов по формуле (4.1) и поток
восстановления по формуле (4.2):
 ; (4.1)
; (4.1)
 ; (4.2)
; (4.2)
производится упрощение структурно-логической схемы расчета надежности
функций. Суть этого упрощения заключается в объединении не резервированных
технических средств, входящих в не зарезервированные участки. При этом
совокупность последовательно соединенных не зарезервированных технических
средств заменяется одним эквивалентным элементом, имеющим характеристики
параметров потока отказов и восстановления, определяемых по формулам:
поток отказов (интенсивность отказов):
 (4.3)
(4.3)
поток восстановления:
 (4.4)
(4.4)
для параллельного соединения при нагруженном резервировании рассчитываются
следующие значения показателей надёжности:
наработка на отказ:
 (4.5)
(4.5)
коэффициент готовности по функции:
 ; (4.6)
; (4.6)
среднее время восстановления:
 ; (4.7)
; (4.7)
производится определение показателей надёжности по формулам:
среднее время безотказной работы:
 ; (4.8)
; (4.8)
вероятность безотказной работы:
 ; (4.9)
; (4.9)
среднее время восстановления:
 ; (4.10)
; (4.10)
вероятность того, что отказ системы вызван выходом из строя элемента i-й
группы:
 (4.11)
(4.11)
где: ti — среднее время, затрачиваемое на
обнаружение и устранение неисправности (отказа) элемента данной группы;
К - количество групп однотипных элементов с одинаковыми режимами;-
количество элементов с одинаковыми режимами.
коэффициент готовности по функции:
 ; (4.12)
; (4.12)
коэффициент оперативной готовности по функции:
 . (4.13)
. (4.13)
.3 Расчет
показателей надежности проектируемой системы
Произведем расчет надежности для разработанной системы автоматизации.
Расчет касается основной части системы, так как отказ именно этой части
наиболее критичен.
Контроллер относится к восстанавливаемым (путем замены блоков) изделиям,
отказ которых создает опасность для людей и среды. Ущерб от отказа может быть
кратен стоимости самого контроллера. Режим эксплуатации контроллера -
непрерывный.
При расчете принимается ряд допущений:
вероятность безотказной работы функции АСУ ТП в течение времени t не зависит от момента начала работы;
функция распределения времени наработки на отказ и времени восстановления
подчиняется экспоненциальному закону;
контроль состояния технических средств АСУ ТП непрерывный;
обслуживание осуществляется при неограниченном восстановлении;
В соответствии с этим по номенклатуре показателей надежности необходимо
привести следующие показатели:
Тв - время восстановления работоспособности;
l - интенсивность отказов, также рассчитать;
Тср - среднее время безотказной работы и привести;
Р(t) - вероятность безотказной работы.
Таблица 4.1 - Показатели интенсивности отказов и времени восстановления
модулей
|
Модуль
|
Кол-во
|
Интенсивность отказов
единицы l*10-5, 1/час
|
Время обнаружения и
устранения неисправности, мин
|
|
1746-NI8
|
4
|
0,08
|
15
|
|
1746-NO4I
|
3
|
0,08
|
15
|
|
1746-IB32
|
2
|
0,02
|
15
|
|
1746-IB8
|
1
|
0,02
|
15
|
|
1746-OB16
|
2
|
0,02
|
15
|
Отказ любого из модулей приведет к отказу всей системы, поэтому общая интенсивность
отказов вычисляется по формуле (4.4):
lобщ = (7×0.08+5×0.02)×l ×10-5=0.66×10-5 1/час
Среднее время безотказной работы рассчитывается по формуле (4.8):
Тср = 1/0.66×10-5 = 151515.15 часа
Для разработанной автоматизированной системы управления справедливы
следующие допущения:
- справедлив экспоненциальный закон надежности;
- отказы элементов взаимно не зависимы.
Исходя из этих допущений вероятность безотказной работы рассчитывается по
формуле (4.9):

 = 0,37
= 0,37
На
основе полученных данных строится график вероятности безотказной работы.
Рисунок
4.1 - Вероятность безотказной работы
Рассчитаем
по формуле (4.10) среднее время восстановления. Для этого рассчитаем по формуле
(4.11) вероятность того, что отказ системы вызван выходом из строя элемента i-й
группы. Результаты расчета Рi в таблице 4.2.
Таблица
4.2 - Вероятность отказа системы вызванного выходом из строя модуля
|
Модуль
|
Рi
|
|
1746-NI8
|
0.48
|
|
1746-NO4I
|
0.36
|
|
1746-IB32
|
0.06
|
|
1746-IB8
|
0.03
|
|
1746-OB16
|
0.06
|
Таким образом, среднее время восстановления равно:
Тв=0.48 ∙ 15 + 0.36 ∙ 15 + 0.06 ∙ 15 + 0.03 ∙ 15
+ 0.06 ∙ 15 = 14.85 минуты
Рассчитаем коэффициент готовности по функции по формуле (4.12):

Рассчитаем
коэффициент оперативной готовности по функции по формуле (4.13):

4.4 Выводы по
разделу
В данном разделе были произведены расчеты по надежности разрабатываемой
системы и были получены следующие результаты:
- интенсивность отказов системы: lобщ=0.66∙10-5 1/час;
- среднее время восстановления: Тв=14.85 минут;
- среднее время безотказной работы: Тср=151515.15 часов;
- вероятность безотказной работы: P(t)= 0.37.
5. Расчет
системы автоматического регулирования уровня в сепараторе
5.1 Сепаратор
как система автоматического регулирования
В данной части дипломного проекта рассматривается контур автоматического
регулирования уровня в сепараторе С1-1. В системе сбора нефти и газа нефтяного
промысла важную роль играют сепарационные установки, в которых происходит
отделение газа от нефти. Надежная работа сепараторов зависит от работы системы
автоматики и определяет функционирование всей системы сбора нефти и газа.
Система автоматического регулирования (САР) - замкнутая динамическая
система, в которой поддерживается постоянное значение одной или нескольких
величин, характеризующих протекание, какого - либо процесса в течение
длительного времени при произвольно меняющихся внешних возмущающих факторах.
Любой автоматический регулятор, который работает на каком - либо объекте,
образует с ним контур регулирования.
В процессе регулирования регулятор и объект регулирования взаимосвязаны,
поэтому качество регулирования зависит от свойств данного объекта и от свойств,
а так же характеристики применяемого регулятора и регулирующего органа.
Система регулирования должна отвечать следующим требованиям:
1) должна быть устойчивой при всех режимах работы данного объекта;
2) отклонение регулируемой величины в процессе ликвидации нарушения
должно быть меньшим;
) время ликвидации возмущения должно быть возможно меньшим;
) регулятор должен справляться с поставленной задачей и не
выходить за пределы отклонений регулируемой величины;
) ошибка в поддержании регулируемой величины должна быть
наименьшей.
5.2
Структурная схема САР с цифровым регулятором
Применение цифровых контроллеров для цепей управления вносит свою
специфику в исследование систем управления, обусловленную тем, что
вычислительные устройства таких контроллеров являются дискретными системами,
оперирующими с дискретными сигналами (последовательностями чисел), т.е.
сигналами принимающими определенные значения только в дискретные, обычно
равноотстоящие моменты времени через интервал времени Т, который обычно
называют интервалом квантования [17].
Входной непрерывный сигнал x(t) в аналого-цифровом преобразователе (АЦП)
преобразуется в дискретную последовательность чисел x(kt), которая
подается на вход цифрового вычислительного устройства (ЦВУ). Здесь она
преобразуется в соответствии с заложенным в нее алгоритмом в синхронную
последовательность чисел y(kt), которая потом в цифро-аналоговом
преобразователе преобразуется в непрерывный сигнал y(t).
Поскольку дискретная последовательность чисел определяет мгновенные
значения непрерывного сигнала в дискретные моменты времени, в качестве модели
такой последовательности можно выбрать последовательность бесконечно коротких
импульсов, так, чтобы величина каждого импульса («площадь» под его графиком)
была равна заменяемому числу (последовательность модулированных дельта -
импульсов, например, x*(t)).
Переход от дискретных сигналов x(kt) и y(kt) к их моделям x*(t) и y*(t) в схеме рисунке 5.1, а требует и
соответствующей замены АЦП и ЦАП их моделями.
а)
x(t) x(kt) y(kt) y(t)
б)
x(t) x*(t) y*(t) y(t)
Рисунок 5.1
ν(t)
U(t) U(kt) ε(kt) μ(kt) μ(t) y(t)
y(kt)
Рисунок 5.2
ν(t)
U U* ε* μ* μ y
y* y* y
Рисунок 5.3
АЦП на входе ЦВУ должен быть заменен дельта - импульсным модулятором,
преобразующим непрерывный сигнал x(t) в модулированную последовательность
дельта - импульсов x*(t). ЦАП на выходе ЦВУ должен быть
заменен демодулятором импульсов, преобразующим дельта - импульсную
последовательность y*(t) в непрерывное (точнее, кусочно -
непрерывное) изменение y(t). Очевидно, что реакция такого
демодулятора на одиночный дельта - импульс должна совпадать с реакцией ЦАП на
отдельное число равное единице.
В простейшем и наиболее распространенном на практике случае ЦАП на выходе
цифрового контроллера перемещает управляющий орган в положение, соответствующее
очередному пришедшему числу, и затем удерживает его в этом положении вплоть до
появления следующего числа.
Такой преобразователь называют фиксатором нулевого порядка, его
передаточная функция
 . (5.1)
. (5.1)
В результате всех рассмотренных преобразований модель канала дискретного
преобразования сигналов (рисунок 5.1, а) приобретает вид, показанный на рисунок
5.1, б. Здесь входной непрерывный сигнал x(t) преобразуется
дельта - импульсным модулятором в модулированную этим сигналом
последовательность дельта - импульсов x*(t), которые затем в непрерывной модели
дискретной системы (МДС) в соответствии с требуемым алгоритмом преобразуются в
выходную последовательность y*(t). В демодуляторе из
последовательности дельта - импульсов y*(t) формируется непрерывный сигнал
выхода y(t).
На
рисунке 5.2 показана структурная схема системы с цифровым регулятором. Здесь в
АЦП осуществляется преобразование непрерывных сигналов изменения регулируемой
величины y(t) и командного воздействия u(t) в
дискретные последовательности чисел y(kt) и u(kt).
В измерительном устройстве регулятора выявляется последовательность дискретных
значений отклонения  , которые передаются на вход ЦВУ. В ЦВУ вырабатывается
дискретное регулирующее воздействие μ(kt), которое в
ЦАП преобразуется в непрерывное перемещение регулирующего органа μ(t).
, которые передаются на вход ЦВУ. В ЦВУ вырабатывается
дискретное регулирующее воздействие μ(kt), которое в
ЦАП преобразуется в непрерывное перемещение регулирующего органа μ(t).
В
соответствии с проведенной заменой сигналов и отдельных элементов системы их
моделями общая модель системы с цифровым регулятором может быть представлена
схемой, приведенной на рисунке 5.3. В этой схеме регулируемая величина объекта y(t) в
дельта - импульсном модуляторе преобразуется в последовательность
модулированных дельта - импульсов y*(t), которая
затем подается на элемент сравнения. На этот же элемент подается другая
последовательность импульсов u*(t), определяющая заданное значение регулируемой
величины u(t) в дискретные моменты времени. Последовательность
импульсов y*(t) и u*(t) синхронны. В элементе сравнения образуется
последовательность импульсов рассогласования  .
Эта последовательность подается в дискретный регулятор, состоящий из
запаздывающих и усилительных звеньев, на выходе которого образуется
последовательность регулирующих сигналов (импульсов) μ*(t).
Далее, в демодуляторе эта последовательность импульсов преобразуется в
непрерывное регулирующее воздействие μ(t), подаваемое
на вход объекта.
.
Эта последовательность подается в дискретный регулятор, состоящий из
запаздывающих и усилительных звеньев, на выходе которого образуется
последовательность регулирующих сигналов (импульсов) μ*(t).
Далее, в демодуляторе эта последовательность импульсов преобразуется в
непрерывное регулирующее воздействие μ(t), подаваемое
на вход объекта.
Спектр
сигнала y(t) на входе дельта - импульсного модулятора занимает
полосу частот, практически не выходящую за граничную высоту  , и, следовательно, боковые составляющие спектра на
выходе дельта - импульсного регулятора практически полностью отфильтровываются
системой. В этих условиях в расчете дельта - импульсный модулятор может быть
принят как непрерывное безинерционное звено с коэффициентом передачи 1/Т.
, и, следовательно, боковые составляющие спектра на
выходе дельта - импульсного регулятора практически полностью отфильтровываются
системой. В этих условиях в расчете дельта - импульсный модулятор может быть
принят как непрерывное безинерционное звено с коэффициентом передачи 1/Т.
Устранение
из расчетной схемы дельта - импульсного модулятора превращает систему в
непрерывную: соответственно схема, изображенная на рисунке 5.3 переходит в
схему, представленную на рисунке 5.4. Это схема обычной непрерывной системы, в
которой передаточная функция непрерывного регулятора определяется формулой
 . (5.2)
. (5.2)
 ν
ν
U ε μ y
y
Рисунок 5.4 - Модель системы с непрерывным регулятором
Формула
(5.2) позволяет, задавшись желаемым алгоритмом функционирования цифровой
системы в режиме получения достаточно полной информации об изменении
регулируемой величины - передаточной функцией эквивалентного непрерывного
регулятора  , определить передаточную функцию цифрового регулятора
, определить передаточную функцию цифрового регулятора
 из приближенного равенства
из приближенного равенства
 , (5.3)
, (5.3)
т.е.
 . (5.4)
. (5.4)
Приближенный
характер получаемого по этой формуле решения определяется тем, что левая ее
часть зависит только от Z, а правая - и от Z и от S.
Для того, чтобы воспользоваться известными численными методами, перепишем (5.4)
так, чтобы в левой части находились члены, зависящие только от Z, а
в правой - зависящие только от S:
 , (5.5)
, (5.5)
где
 . (5.6)
. (5.6)
Теперь
можно определить передаточную функцию  ,
приближенно реализующую передаточную функцию в правой части этой формулы, после
чего передаточную функцию цифрового регулятора можно найти из формулы
,
приближенно реализующую передаточную функцию в правой части этой формулы, после
чего передаточную функцию цифрового регулятора можно найти из формулы
 . (5.7)
. (5.7)
В частности, если демодулятор выполнен в виде фиксатора нулевого порядка,
имеющего передаточную функцию (6.1), то
 , (5.8)
, (5.8)
 ; (5.9)
; (5.9)
в этом случае приобретает вид:
 , (5.10)
, (5.10)
где
 . (5.11)
. (5.11)
В проекте системой регулирования является система регулирования уровня в
сепараторе С1-1. Система регулирования одноконтурная.
Структурная схема одноконтурной САР с цифровым регулятором приведена на
рисунке 5.4. Передаточная функция цифрового ПИ - регулятора имеет вид:
 , (5.12)
, (5.12)
где
 .
.
Передаточная функция эквивалентного непрерывного регулятора в этом случае
будет определяться следующим выражением:
 . (5.13)
. (5.13)
5.3
Определение передаточной функции объекта по его переходной характеристике
На рисунке 5.5 приведена переходная характеристика объекта регулирования.
По характеру переходной характеристики объект управления относится к объектам с
самовыравниванием (статические объекты).
Данный вид переходной характеристики соответствует апериодическому звену
первого порядка с запаздыванием. Общий вид передаточной функции в этом случае
будет иметь следующий вид:
 , (5.14)
, (5.14)
где
 - коэффициент усиления объекта;
- коэффициент усиления объекта;
 -
постоянная времени объекта;
-
постоянная времени объекта;
 - время
запаздывания объекта.
- время
запаздывания объекта.
Для объекта с самовыравниванием коэффициент усиления может быть
непосредственно найден из графика переходной функции:
 , (5.15)
, (5.15)
где
 - относительное изменение выходной величины;
- относительное изменение выходной величины;
 -
относительное изменение входной величины.
-
относительное изменение входной величины.
Эти параметры рассчитываются по следующим формулам:
 , (5.16)
, (5.16)
 , (5.17)
, (5.17)
где
 - установившееся значение уровня;
- установившееся значение уровня;
 -
начальное значение уровня;
-
начальное значение уровня;
 -
перемещение регулирующего органа;
-
перемещение регулирующего органа;
 - новое
значение.
- новое
значение.
Из
графика переходного процесса определяем:
 ;
;
 .
.
Тогда
 .
.
Определяем
по графику переходной характеристики запаздывание τ и постоянную времени  :
:
τ = 8 с;
= 64 с.
В
результате передаточная функция объекта регулирования будет иметь следующий
вид:
 .
.
Рисунок 5.5 - Переходная характеристика исследуемого объекта (контур
регулирования уровня в сепараторе С1-1)
5.4 Расчет оптимальных параметров настройки цифрового регулятора
В данной системе можно использовать ПИ - закон регулирования, поскольку
нет повышенный требований к качеству регулирования, а также для системы с ПИ -
регулятором упрощаются расчеты настроек.
Для расчета настроек регулятора воспользуемся методом расширенных КЧХ.
В методе расширенных КЧХ получают комплексную частотную характеристику W(m,jw) из передаточных
функций заменой S на (jw-mw), где m -
степень колебательности.
Степень колебательности m
связана со степенью затухания переходного процесса выражением:
 , (5.18)
, (5.18)
где
ψ
- степень затухания переходного процесса.
Степень
затухания можно определить по графику переходного процесса и вычислить по
формуле:
 , (5.19)
, (5.19)
где
А1 и А2 - положительные амплитуды первого и второго колебания в переходном
процессе.
Для
начала расчета задаются значением ψ в пределах 0,9 - 1,0 или степенью колебательности m в
пределах 0,25 - 0,47.
Записывая
передаточную функцию объекта (непрерывной части ЦСАУ) в виде:
 , (5.20)
, (5.20)
получим для статического объекта с запаздыванием:
 , (5.21)
, (5.21)
где
k - коэффициент передачи объекта (непрерывной части
ЦСАУ),
Т
- постоянная времени объекта,
τ - время запаздывания.
Передаточная
функция непрерывного ПИ - регулятора
 , (5.22)
, (5.22)
где
 ,
,  -
параметры настройки ПИ - регулятора.
-
параметры настройки ПИ - регулятора.
Расширенная
КЧХ ПИ - регулятора
 . (5.23)
. (5.23)
Исходным
для расчета границы области заданной степени затухания ψ или степени колебательности m является
соотношение:
 . (5.24)
. (5.24)
Тогда (5.24) можно преобразовать в систему двух уравнений:
 . (5.25)
. (5.25)
Решив
эту систему уравнений относительно  и
и  , найдем границу области заданной степени
колебательности в параметрической форме:
, найдем границу области заданной степени
колебательности в параметрической форме:
 (5.26)
(5.26)
Задавая
различные значения частоты w от 0 до значения, при котором становится отрицательной величиной или до значения
частоты среза можно построить искомую границу заданной степени колебательности m.
Параметры  и
и  вычисляются
на ЭВМ. По результатам расчета в плоскости параметров настройки регулятора - строится
граница области заданного m. Приближенные параметры дискретного регулятора
соответствуют условию
вычисляются
на ЭВМ. По результатам расчета в плоскости параметров настройки регулятора - строится
граница области заданного m. Приближенные параметры дискретного регулятора
соответствуют условию  . В этом случае квадратичная интегральная оценка
стремится к min. Однако, оптимальной выбирают точку, расположенную
правее точки
. В этом случае квадратичная интегральная оценка
стремится к min. Однако, оптимальной выбирают точку, расположенную
правее точки  .
.
Следовательно,
дальнейший расчет (уточнение) параметров дискретного регулятора следует
проводить в диапазоне =max - =opt.
В
результате вычислений оптимальные настройки, определенные описанным выше
способом, равны :  с,
с,  .
.
5.5
Построение переходного процесса в системе регулирования
5.5.1 Оценка
качества регулирования
Любая
промышленная САР должна обеспечивать определенные качественные показатели
процесса регулирования. Качество процесса регулирования обычно оценивают по
переходной характеристике  по отношению к единичному ступенчатому воздействию
(рисунок 5.6). Основными показателями качества являются: время регулирования,
перерегулирование, колебательность и установившаяся ошибка.
по отношению к единичному ступенчатому воздействию
(рисунок 5.6). Основными показателями качества являются: время регулирования,
перерегулирование, колебательность и установившаяся ошибка.
Временем
регулирования  (время переходного процесса) в практических расчетах
считают время, по истечении которого, начиная с момента приложения воздействия
на систему, отношение значения регулируемой величины
(время переходного процесса) в практических расчетах
считают время, по истечении которого, начиная с момента приложения воздействия
на систему, отношение значения регулируемой величины  от ее установившегося значения
от ее установившегося значения  не превышает заданную точность регулирования
не превышает заданную точность регулирования  . Таким образом, время регулирования определяет
длительность (быстродействие) переходного процесса.
. Таким образом, время регулирования определяет
длительность (быстродействие) переходного процесса.
Перерегулированием
 называется максимальное отклонение
называется максимальное отклонение  регулируемой величины от установившегося значения . Оно должно быть не более 20%.
регулируемой величины от установившегося значения . Оно должно быть не более 20%.
web интерфейс клиент сервер




t
Рисунок 5.6 - Показатели качества регулирования
Колебательность
системы характеризуется числом колебаний регулируемой величины за время
регулирования . Если за это время переходный процесс в системе
совершает число колебаний меньше заданного по условиям технологии, то
считается, что система имеет требуемое качество регулирования в части ее
колебательности.
Для
оценки колебательности в ряде случаев удобно также пользоваться понятием
«степень затухания», которая рассчитывается по формуле (5.19).
Показатели
качества регулирования определяются непосредственно по кривой переходного
процесса.
Между
изображением входного воздействия  и
выходом
и
выходом  справедлива следующая зависимость:
справедлива следующая зависимость:
 , (5.27)
, (5.27)
где
 - передаточная функция замкнутой системы
автоматического регулирования.
- передаточная функция замкнутой системы
автоматического регулирования.
В
качестве входного воздействия в ЦСАР используют единичное ступенчатое
воздействие, изображение которого имеет вид:
 . (5.28)
. (5.28)
Передаточная функция замкнутой ЦСАР имеет вид:
 . (5.29)
. (5.29)
Передаточная функция разомкнутой системы определяется по формуле:
 . (5.30)
. (5.30)
Тогда:
 , (5.31)
, (5.31)
 .
.
Подставим
формулы (5.31) и (5.28) в (5.27) и произведем дополнительные замены:
Таким
образом, Z - изображение последовательности импульсов выходной
величины определяется по формуле:
 (5.32)
(5.32)
Разделив
числитель выражения (5.32) на знаменатель получим бесконечный ряд по степеням  , сумма коэффициентов которого даст площадь под кривой
переходного процесса для данных значений настройки. При минимальной сумме будем
иметь оптимальные параметры настройки.
, сумма коэффициентов которого даст площадь под кривой
переходного процесса для данных значений настройки. При минимальной сумме будем
иметь оптимальные параметры настройки.
По
кривой переходного процесса (рисунок 5.7) оцениваем качество процесса
автоматического регулирования:
) время
регулирования  с;
с;
) перерегулирование
 %;
%;
) коэффициент
затухания переходного процесса  ;
;
) степень
колебательности  .
.
Настроечные параметры регулятора:
1) коэффициент
передачи пропорционального регулятора  ;
;
) постоянная
времени  с.
с.
Рисунок 5.7 - График переходного процесса
6.
Комплексная оценка экономической эффективности дожимной насосной станции
6.1 Методика
расчета экономических показателей проектируемой системы
Экономическая часть дипломного проекта выполнена на базе технической
части и на основе исходных данных.
К основным исходным данным относятся:
1) действующие цены на материалы, приборы и т.д.;
2) срок реализации проекта;
) тарифы на электроэнергию;
) нормы амортизации, вытекающие из срока реализации проекта;
) ставки налогов (налог на прибыль - 24%, налог на имущество -
2,2% от остаточной стоимости проекта, ставка НДС - 18%);
) средняя заработная плата;
) накладные расходы (в %), прибавленные к з/плате (единый
социальный налог - 35,6%, коэффициент доплат к з/п - 30%, районный коэффициент
- 70%).
Степень автоматизации процесса определяется экономическим эффектом,
который может быть получен от внедрения автоматического управления.
Экономический эффект образуется за счет перевода технологического процесса на
автоматическое управление, что в свою очередь приводит к повышению его
рентабельности.
Оценка эффективности проекта осуществляется с помощью расчета системы
показателей. При этом все эти показатели имеют важную особенность: расходы и
доходы, разнесенные по времени приводятся к единому моменту времени -
расчетному или базовому моменту. Расчетным или базовым моментом считается дата
реализации объекта или начало производства продукции [18].
Экономическая эффективность капитальных вложений на разработку и
внедрение системы автоматизации определяться методами окупаемости, простой
нормы прибыли и дисконтирования.
Экономическая эффективность капитальных вложений на разработку и
внедрение автоматизированной системы управления технологическими процессами
добычи нефти может определяться с помощью расчета следующих показателей:
) чистый дисконтированный доход;
) внутренняя норма доходности;
) срок окупаемости капитальных вложений;
) рентабельность проекта.
Перечисленные показатели являются результатами сопоставлений
распределенных во времени доходов к инвестициям и затратам на производство.
В качестве базового момента приведения разновременных доходов и расходов
принимаем дату начала реализации проекта.
Чистый дисконтированный доход рассчитывается по формуле:
ЧДД =  ЧДt × at , (6.1)
ЧДt × at , (6.1)
где ЧДt - чистый доход в году t, тыс.руб.;
at - коэффициент дисконтирования (приведения), доли ед.;н, tк -
соответственно начальный и конечный годы расчетного
периода.
Проект считается прибыльным и его следует принять, если ЧДД больше нуля
(ЧДД>0) в случае же, когда ЧДД меньше нуля (ЧДД<0) - проект отвергается.
Отдельный член денежного потока наличности (ЧДt) равен разности между
ожидаемой величиной доходов от реализации проекта и всеми видами затрат, и
может отличаться от другого как по знаку (т.е. быть отрицательным), так и по
величине, и рассчитывается по формуле:
ЧДt = П + At - Ht - Kt ,
(6.2)
где П - прибыль, обеспечиваемая внедрением системы в году t.
Аt - амортизационные отчисления от стоимости системы, тыс. руб.;- сумма
налогов, уплачиваемых предприятием из прибыли в бюджет, тыс. руб.;
Так как система автоматизации технологических процессов позволяет
сократить эксплуатационные расходы, то прибыль (чистый доход), обеспечиваемая
внедрением системы, определяется как разность между годовыми эксплуатационными
затратами до и после автоматизации. Тогда формула (7.2) примет вид:
ЧДt = Cдt - Срt + At - Ht - Kt , (6.3)
где Cдt , Срt - годовые эксплуатационные затраты на систему автоматизации
соответственно в действующем и разработанном вариантах, тыс. руб.;
Общая экономия годовых эксплуатационных затрат в результате автоматизации
может быть определена и по отдельным статьям затрат.
Экономия годовых эксплуатационных затрат выражается следующим образом:
Э = Энеф + Ээл.эн + Эзп , (6.4)
где Энеф -
экономия нефти после внедрения АСУ ТП, руб.;
Ээл.эн - стоимость
сэкономленной за год электроэнергии, руб.;
Эзп - стоимость
сэкономленной за год заработной платы рабочим, руб.;
Экономия за счет уменьшения потерь нефти определяется по формуле:
Энеф = Цнеф × Dнеф, (6.5)
где:
Цнеф - цена 1 тонны нефти, руб.;
Dнеф - изменение расхода нефти, т/год
Экономия расхода электроэнергии определяется по формуле:
Ээл.эн = Dэл.
эн × Цэл. эн,
(6.6)
где: Dэл. эн -
изменение расхода электроэнергии, кВт/ч
Цэл. эн - стоимость
электроэнергии, руб. за 1 кВт/ч.
Экономия заработной платы определяется по формуле:
Эзп = L × Зо (6.7)
где: Зо - среднегодовая зарплата одного работника, руб.;
L -
количество сокращенных работников.
Расчет рентабельности единовременных затрат производится по формуле:
P =
(ЧДД + К) / К × 100,
(6.8)
где К - общие единовременные затраты, тыс. руб.
 . (6.9)
. (6.9)
Считается, что если полученная рентабельность равна 100%, то
рентабельность проекта равна заданной, если больше, то имеет место
сверхрентабельность, если меньше - проект не обеспечивает заданный уровень
рентабельности.
Коэффициент дисконтирования определяется по формуле:
at = (1
+ Eн)tp- t , (6.10)
где Ен - нормативный коэффициент эффективности единовременных затрат,
равный ставке банковского процента за долгосрочный кредит, выраженный в долях
единиц;- расчетный год;- год, затраты и результаты которого приводятся к
расчетному году.
В качестве начального года расчетного периода принимается год начала
финансирования работ по созданию проекта, включая проведение научных
исследований.
Конечный год расчетного периода определяется моментом завершения
жизненного цикла системы, прекращением его использования на производстве.
В качестве расчетного года обычно принимается наиболее ранний из всех
рассматриваемых вариантов календарный год, предшествующий началу использования
на предприятии разрабатываемой системы.
Изменение чистого дисконтированного дохода за счет использования системы
будет рассчитываться по формуле (6.1).
Для анализа эффективности единовременных затрат на разработку и внедрение
системы используется показатель - внутренняя норма доходности (коэффициент
эффективности единовременных затрат ВНД), определяемый из соотношения:
 (6.11)
(6.11)
Вычисляемые коэффициенты эффективности позволяют судить об общем и
минимальном уровне эффективности единовременных затрат, осуществляемых на
предприятии.
Другим назначением показателя ВНД является оценка возможности привлечения
заемных средств на разработку и внедрение системы. Расчетное значение ВНД
соответствует максимально допустимому проценту за кредит, который может быть
использован для полного финансирования единовременных затрат по данной системе.
Если величина ВНД равна проценту за кредит, то чистый дисконтированный
доход оказывается равным нулю. Таким образом, вычисляемое значение позволяет
судить о приемлемости для предприятия условий кредитования.
Другим показателем, применяемым для анализа эффективности единовременных
затрат, является срок окупаемости Ток. Экономическое содержание этого
показателя заключается в определении момента времени, необходимого для покрытия
единовременных затрат в проект.
Период возврата единовременных затрат (Ток) определяется последовательным
сложением величин:
 (6.12)
(6.12)
пока полученная сумма не сравняется с величиной единовременных затрат,
приведенных к расчетному году. Количество произведенных сложений равняется
периоду возмещения капитальных вложений или сроку окупаемости.
Сумма налогов на прибыль и имущество рассчитывается по формуле:
Н = Нпр + Ним , (6.13)
где Нпр - налог на прибыль, тыс. руб.;
Ним - налог на имущество, тыс. руб.
 , (6.14)
, (6.14)
где СТпр - ставка налога на прибыль, %.
 , (6.15)
, (6.15)
где Коt - остаточная стоимость внедряемой системы в году t, тыс. руб.;
СТим - ставка налога на имущество, %.
Отчисление на амортизацию в модернизированном варианте, руб.,
рассчитывается по формуле:
 (6.16)
(6.16)
где:
На - норма амортизации, %.
К
- общие единовременные затраты, тыс.р.
6.2 Расчет
капитальных вложений на вводимую систему автоматизации
.2.1 Расчет единовременных затрат
Единовременные затраты предприятия - заказчика на приобретение устройства
включают единовременные затраты предприятия изготовителя и его прибыль, а также
НДС, т.е. определяются по формуле (6.17):
 , (6.17)
, (6.17)
где К - единовременные затраты на создание системы автоматизации тыс.
руб;- коэффициент рентабельности предприятия разработчика, доли ед.;
НДС - ставка налога на добавленную стоимость, доли ед.
Затраты на транспортировку изделия равны:
Ртрп = Коб × Ктрп , (6.18)
где Ктрп - коэффициент, учитывающий затраты на транспортировку изделия.
Кроме того, в ряде случаев следует учесть затраты на монтаж, установку и
запуск в работу у заказчика:
Рмуз = Кoб × Кмуз , (6.19)
где Кмуз - коэффициент, учитывающий затраты на монтаж, установку и запуск
в работу.
При этом совокупные затраты предприятия заказчика будут складываться из
затрат на приобретение, затрат на транспортировку, монтаж, установку и запуск в
работу.
В общем случае единовременные затраты на создание системы определяются по
формуле:
К = Краз + Кпрог + Кизг , (6.20)
где Краз - затраты на проектирование (разработку) системы, тыс. руб.;
Кпрог - затраты на программирование, тыс. руб.;
Кизг - затраты на изготовление, тыс. руб.
Примерный перечень исходных данных предприятия разработчика для расчета
единовременных затрат представлен в таблице 6.1.
Внедряемая система автоматизации позволит увеличить экономичность и
производительность дожимной насосной станции.
В таблице 6.1 представлены исходные данные для проведения расчета
единовременных затрат предприятия разработчика
Таблица 6.1 - Данные для расчета единовременных затрат
|
Показатель
|
Значение
|
|
1. Заработная плата
разработчика, руб./мес
|
6000
|
|
2. Заработная плата
программиста, руб./мес
|
6000
|
|
3. Заработная плата
изготовителя, руб./мес
|
6500
|
|
3. Коэффициент доплат к
заработной плате, доли ед.
|
0.3
|
|
4. Районный коэффициент,
доли ед.
|
0.7
|
|
5. Коэффициент отчисления в
социальные фонды, доли ед.
|
0.356
|
|
6. Время разработки
системы, месяцы (или часы)
|
5.5
|
|
7. Время разработки проекта
и проектной документации, мес.
|
2.2
|
|
8. Время создания
программы, мес.
|
3.3
|
|
9. Время изготовления
устройства, мес
|
2,7
|
|
10. Коэффициент накладных
расходов, доли ед.
|
0.04
|
|
Продолжение таблицы 6.1
|
|
|
Показатель
|
Значение
|
|
11. Годовой фонд работы
ЭВМ, час
|
2016
|
|
12. Годовой фонд оплаты
труда персонала обслуживающего ЭВМ, руб.
|
72000
|
|
13. Норма амортизационных
отчислений ЭВМ, доли ед.
|
0.125
|
|
14. Норма амортизационных
отчислений здания, доли ед.
|
0.02
|
|
15. Площадь
занимаемая ЭВМ, м2
|
6
|
|
16. Стоимость одного м2
здания, руб.
|
6000
|
|
17. Стоимость
ЭВМ, руб.
|
30000
|
|
18. Коэффициент накладных
расходов на экспл. ЭВМ, доли ед.
|
0.04
|
|
19.
Потребляемая мощность ЭВМ, кВт
|
0,35
|
|
20. Стоимость кВт/часа, руб.
|
0.7
|
|
21. Коэффициент затрат на
ремонт ЭВМ (от стоимости), доли ед.
|
0.1
|
|
22. Ставка НДС,
доли ед.
|
0.18
|
|
23. Коэффициент интенсивного
использования оборудования, доли ед.
|
0.9
|
6.2.2 Расчет
затрат на проектирование (разработку) системы
Затраты на разработку можно представить в виде:
Краз = Зо × Траз × (1+Кд) × (1+Кр) × (1+Ксн) × (1+Кн.раз) , (6.21)
где Зо - месячный оклад разработчика, руб.;
Траз - трудоемкость разработки проекта и проектной документации, ч×мес (примерный перечень элементов
трудоемкости разработки представлен в таблице 7.2);
Кд, Кр - соответственно коэффициенты доплат к заработной плате и
районный, доли ед.;
Ксн - коэффициент отчислений на социальные нужды, доли ед.;
Кнраз - коэффициент накладных расходов, доли ед.
Таблица 6.2 - Данные для расчета трудоемкости разработки
|
Стадии разработки
|
Трудоемкость, чел. месяц
|
|
1. Изучение патентов
|
0.3
|
|
2. Изучение литературных источников
|
0.6
|
|
3. Разработка технического
задания
|
0.3
|
|
4. Разработка эскизного
проекта
|
0.2
|
|
5. Разработка технического
проекта
|
0.8
|
|
6. Разработка рабочего
проекта
|
2.8
|
|
7. Внедрение проекта
|
0.5
|
Трудоемкость разработки проекта и проектной документации (Траз) равна:
Траз= 0,3+0,6+0,3+0,2+0,8 = 2.2 чел. Месяц
Подставив трудоемкость разработки (Траз) в формулу (5.21) получаем
затраты на разработку системы (Краз):
Краз= 6000× 2.2 × (1 +
0.3) × (1 + 0.7) × (1 + 0.356) × (1 + 0.04) = 41139,52 руб.
6.2.3 Расчет
затрат на разработку программного обеспечения
Затраты на разработку программного обеспечения можно представить в виде:
Кпрог = Зо × Тпрог ×(1+Кд)×(1+Кр) × (1+Ксн) × (1+Кн.прог) +Смч × Тпрог × Кч , (6.22)
где Зо - месячный оклад программиста, руб;
Тпрог - время на создание программы, мес.;
Кн.прогр - коэффициент накладных расходов, доли ед.;мч - стоимость
машино-часа ЭВМ, руб.;
Кч - коэффициент перевода единиц времени.
Стоимость машино-часа ЭВМ рассчитывается по формуле:
Смч = Sэкс / Тпол , (6.23)
где Sэкс - годовые эксплуатационные расходы, связанные с обслуживанием
ЭВМ, руб.;
Тпол - годовой фонд работы ЭВМ, час.
Эксплуатационные расходы рассчитываются по формуле:
экс = 12 × ЗП × (1+Кд) × (1+Кр) × (1+Ксн) + А + Тр + Э + М + Нрэкс ,
(6.24)
где ЗП - месячная оплата труда всего обслуживающего персонала в сумме,
руб.;
А - амортизационные отчисления от стоимости ЭВМ и здания, руб./год;
Тр - затраты на ремонт, руб./год;
Э - затраты на электроэнергию, руб./год;
М - затраты на материалы, руб.;
Нрэкс - накладные расходы, связанные с эксплуатацией ЭВМ, руб./год.
Затраты на амортизацию вычисляются по формуле:
А = Кэвм × Нэвм + Сзд × Sзд × Нзд ,
(6.25)
где Кэвм - балансовая стоимость ЭВМ, руб.;
Нэвм - норма амортизационных отчислений от стоимости ЭВМ, доли ед.;
Сзд - стоимость 1 м2 здания, руб./м2;зд - площадь, занимаемая ЭВМ, м2;
Нзд - норма амортизационных отчислений от стоимости здания, доли ед.
Затраты на ремонт вычислим по формуле:
Тр = Кэвм × Ктрэвм , (6.26)
где Ктрэвм - коэффициент, учитывающий затраты на ремонт ЭВМ.
Кэвм - балансовая стоимость ЭВМ, руб.;
Затраты на электроэнергию, потребляемую ЭВМ за год эксплуатации
определяем по формуле:
Э = Ц × Тпол × N × Км , (6.27)
где Ц - цена за один кВт×ч электроэнергии, руб.;- потребляемая мощность, кВт;
Км - коэффициент интенсивного использования мощности вычислительной
техники;
Тпол - годовой фонд работы ЭВМ, час.
Затраты на материалы определяем по формуле:
 , (6.28)
, (6.28)
где i - вид материала;
Цi - цена i-того материала, руб.;
Мi - количество i-го материала.
Таблица 6.3 - Перечень и стоимость материалов используемых для ЭВМ
|
Наименование материала
|
Количество в год
|
Цена за ед., р.
|
Стоимость, р.
|
|
Гибкие магнитные диски
|
15
|
25
|
375
|
|
Бумага
|
10
|
170
|
1700
|
|
Ткань обтирочная, м2
|
1
|
30
|
30
|
|
Спирт этиловый, л
|
0,2
|
|
35
|
|
Итого
|
|
|
2140
|
В годовые эксплуатационные затраты по обслуживанию ЭВМ входят также
накладные расходы, которые рассчитываются по формуле:
Нрэкс = 12 × Зо × (1 + Кд)
× (1 + Кр) × Кнэкс, (6.29)
где Кнэкс - коэффициент накладных расходов, связанных с эксплуатацией
ЭВМ.
Подставив данные из таблицы 6.1 в формулу (6.25) получаем затраты на
амортизацию (А):
А = 30000 × 0.125 + 6 000× 6 × 0.02 =
4470 руб.
Подставив данные из таблицы 6.1 в формулу (6.26) получаем затраты на
ремонт (Тр):
Тр = 30000 × 0.1 = 3000 руб.
Подставив данные из таблицы 6.1 в формулу (6.27) получаем затраты на
электроэнергию (Э):
Э = 0.7 × 2016 × 0.35 × 0.9 = 444,53 руб.
Расчет затрат на материалы представлен в виде таблице 6.3:
М = 2140 руб.
Подставив данные из таблицы 6.1 в формулу (6.29) получим накладные
расходы:
Нрэкс = 12 × 6000 × (1 +
0.3) × (1 + 0.7) × 0.04 = 6364,80 руб.
Подставив результат формул (6.27), (6.29) в формулу (6.26) получим
эксплуатационные расходы (Sэкс ):экс = 72000 × (1 + 0.3) × (1 + 0.7) × (1 + 0.356) + 4470 + 3000 + 444,53 +
2140 + 6364,80 = 232186,05 руб.
Подставив данные из таблицы 6.1 и результат формулы (6.22) в формулу
(6.23) получим стоимость одного машино-часа (Смч):
Смч = 232186,05 / 2016 = 115,17 руб.
Коэффициент перевода в единицу времени (Кч):
Кч
= 8часов  21 раб. день = 168 часов в месяц
21 раб. день = 168 часов в месяц
Трудоемкость
программирования проекта и проектной документации (таблица 6.2) равна:
Тпрог
= 2,8+0,5 = 3,3 чел.месяц
Исходя
из полученных результатов для формулы (6.22) и исходных данных таблицы 6.1
находим капитальные затраты на разработку программного обеспечения (Кпрог).
Кпрог=6000×3,3×(1+0.3)×(1+0.7)×(1+0.356)×(1+0.04)+115,17×3,3×168=125560,45 руб.
Годовая
заработная плата труда персонала рассчитывается по формуле:
зп
= 12 × ЗП × (1 + Кр) × (1 + Кнс) × (1 + Кд) (6.30)
Годовые
отчисления на социальные нужды рассчитывается по формуле:
сн
= (12 × ЗП × Ксн%) / 100%
(6.31)
Подставив
данные из таблицы 6.1 в формулу (6.30) получим средства на оплату труда персонала:зп
= 72000 × (1 + 0.7) × (1 + 0.356) × (1 + 0.3) = 215766,72 руб.
Подставив
данные из таблицы 6.1 в формулу (6.31) получим отчисления на социальные
нужды:сн = (72000 36.5%) / 100% = 25632 руб.
В
таблице 6.4 представлены расчет полной себестоимости и отпускной цены
машино-часа:
Таблица 6.4 - Полный расчет себестоимости и отпускной цены машино-часа
|
Статьи затрат
|
Затраты
|
|
рублей
|
%
|
|
1. Средства на оплату труда
|
215766,72
|
82,26
|
|
2. Отчисления на социальные
нужды
|
25632
|
9,77
|
|
3. Амортизационные
отчисления: а) ЭВМ б) здания
|
4470 3000 720
|
1,70 1,43 0,27
|
|
4. Ремонт
|
3000
|
1,14
|
|
5. Материалы
|
2140
|
0,82
|
|
6. Электроэнергия
|
444,53
|
0,17
|
|
7. Прочие накладные расходы
|
6364,80
|
2,43
|
|
Итого
|
262288,05
|
100
|
6.2.4 Расчет
затрат на изготовление и отладку проектируемой системы
Для расчета затрат могут быть использованы различные методы:
1) калькуляционный метод расчета полной себестоимости;
2) агрегатный метод;
) метод удельных весов;
) метод учета затрат на единицу массы изделия;
) балловый метод.
Расчет себестоимости по калькуляционным статьям затрат.
Себестоимость изделия по этому методу определяется по следующим (в общем
случае) статьям затрат:
1) материалы (по спецификации);
2) покупные комплектующие изделия, полуфабрикаты и услуги кооперативных
предприятий (по спецификации);
) топливо и электроэнергия на технологические цели;
) производственная заработная плата;
) доплаты к заработной плате;
) отчисления на социальные нужды;
) износ инструментов и приспособлений целевого назначения и прочие
специальные расходы;
) расходы на содержание и эксплуатацию оборудования;
) накладные расходы.
Порядок расчета затрат на покупные комплектующие изделия и полуфабрикаты
приведен в таблицах 6.5 и 6.6.
Таблица 6.5 - Стоимость контроллера и программного обеспечения
|
Наименование
|
Колич-во, шт.
|
Стоим. ед, €
|
Полная стоимость, рублях
|
|
1747-L531B (SLC
5/03)
|
1
|
1162.8
|
39825.9
|
|
Модуль 1746-NI8
|
4
|
638.4
|
87460.8
|
|
Модуль1746-NO4I
|
3
|
278.73
|
28639.5
|
|
Модуль 1746-IB32
|
2
|
379.62
|
13001.98
|
|
Модуль 1746-IB8
|
1
|
175.32
|
6004.71
|
|
Модуль 1746-OB16
|
2
|
657.78
|
22528.96
|
|
Шасси 1746-А7
|
1
|
287.42
|
9844.14
|
|
Шасси 1746-А10
|
1
|
419.84
|
14379.52
|
|
Блок питания 1746-Р1
|
1
|
272.37
|
9328.67
|
|
Блок питания 1746-Р2
|
1
|
407.79
|
13966.81
|
|
Компьютер, PENTIUM IV
|
1
|
1221.39
|
41832.61
|
|
Принтер HP LJ 1200
|
1
|
370
|
12627.5
|
|
SMART UPS 1000
VA APC
|
1
|
13015
|
|
RS View32
Runtime+RS Linx+RS-Logix
|
1
|
7300
|
250025
|
|
Кабель
|
1
|
4900
|
167825
|
|
Модем 3COM US Robotics
|
1
|
168
|
5754
|
|
ИТОГО:
|
724586.35-167825=556761.35
|
Таблица 6.6 - Стоимость средств автоматизации нижнего уровня
|
Наименование
|
Кол-во, шт.
|
Стоим., руб.
|
Полная стоимость, руб.
|
|
AGAR
|
1
|
1790
|
1790
|
|
CMF-300
|
1
|
27000
|
27000
|
|
CFM700-DN-150
|
2
|
35000
|
70000
|
|
БУЭП-1
|
8
|
24150
|
193200
|
|
Б-Ц14-46-2
|
2
|
3200
|
6400
|
|
ДМ-2005Ех
|
7
|
759
|
5313
|
|
ДУУ-3
|
5
|
33700
|
168500
|
|
Корунд-20и
|
3
|
61120
|
183360
|
|
Метран-100ДД-Ех1450АС
|
3
|
23500
|
70500
|
|
Метран-100ДИ-Ех1160АС
|
6
|
20100
|
120600
|
|
Метран-100ДА-Ех1060АС
|
2
|
19850
|
39700
|
|
МЭМ 39033-01
|
9
|
18000
|
162000
|
|
СТМ-10
|
2
|
13039
|
26078
|
|
СУР-4
|
9
|
10210
|
91890
|
|
ТСМ-055/3-ИП6
|
3
|
1120
|
3360
|
|
ТСМУ-055/1
|
1
|
1630
|
1630
|
|
ТСМУ-055/2
|
3
|
1220
|
3660
|
|
ТСМУ-205Ех
|
4
|
1390
|
5560
|
|
ИТОГО:
|
1180541
|
Итого общая стоимость проектируемой системы составит:
S = 556761.35 + 1180541= 1737302,4 руб.
Затраты на основную заработную плату при изготовлении устройства равны:
= Тм × Зо ,
(6.32)
где Зо - месячная зарплата изготовителя устройства, тыс. руб.;
Тм - трудоемкость изготовления устройства, чел × мес. (таблица 7.2).
Доплата к заработной плате изготовителя равна:
д = L0 . Кд (1+ Кр). (6.33)
Отчисления в социальные фонды:
сн = (Lо + Lд) . Ксн . (6.34)
Затраты на электроэнергию рассчитаем по формуле:
 , (6.35)
, (6.35)
где Цэл - стоимость одного кВт×ч электроэнергии, руб.;- мощность i-го вида оборудования, Вт;
Кинт i - коэффициент интенсивного использования оборудования, доли ед.;-
время использования i-го вида оборудования, час;- количество использованных
приборов, шт.
Таблица 6.7 - Расчет затрат на энергию
|
Наименование оборудования
|
Потребляемая мощность, кВт
|
Коэфф. интенсив. ипольз.
|
Время использования, час
|
|
Образцовый датчик давления
|
0.038
|
0.8
|
640
|
|
Образцовый датчик
температуры
|
0.03
|
0.8
|
640
|
|
Образцовый датчик уровня
|
0.02
|
0.8
|
640
|
|
Образцовый датчик расхода
|
0.001
|
0.8
|
640
|
Затраты на ремонт рассчитываются по формуле:
 , (6.36)
, (6.36)
где Ктризг - коэффициент, учитывающий годовые затраты на ремонт, доли
ед.;
Кобi - стоимость оборудования, используемого при проверке системы на
работоспособность, руб.;- количество единиц оборудования, шт.;
Тпримi - время использования i-го вида оборудования, год.
Затраты на амортизацию используемого при изготовлении и настройке
оборудования рассчитываются по формуле:
А
=  Ai = (Кобi × Наi × Тпримi/100 %) (6.37)
Ai = (Кобi × Наi × Тпримi/100 %) (6.37)
где
Hai - норма амортизации i-го вида оборудования, %.
m - количество
образцовых датчиков.
Исходные
данные для расчета амортизации представлены в таблице 6.8
Таблица 6.8 - Амортизация оборудования, используемого в процессе
изготовления
|
Название оборудования
|
Балансовая стоимость Кобi
|
Норма амортизации Hai, %
|
Время использования Тпримi,
год
|
|
Образцовый датчик давления
|
5000 руб.
|
1.65
|
0,3
|
|
Образцовый датчик
температуры
|
10000 руб.
|
1.65
|
0,3
|
|
Образцовый датчик уровня
|
12000 руб.
|
1.65
|
0,3
|
|
Образцовый датчик расхода
|
13000 руб.
|
1.65
|
0,3
|
Накладные расходы, связанные с изготовлением и отладкой проектируемой
системы, рассчитаем по формуле:
Нризг = Тм × З0 × (1 + Кд)
× (1 + Кр) × Кнризг . (6.38)
Подставив данные из таблицы 6.1 в формулу (6.32) получим затраты на
основную заработную плату при изготовлении устройства (L0):= 2,7 × 6500 = 17550 руб.
Подставив данные из таблицы 6.1 и расчет по формуле (6.32) в формулу
(7.33) получим доплату к заработной плате изготовителя (Lд):д = 17550 × 0.3 × (1 + 0.7) = 8950,5 руб.
Подставив расчеты по формулам (6.32, 6.33) в (6.35) получим отчисления в
социальные фонды (Lсн):
Lсн
= (17550+8950,5) 0.356 = 9434,18 руб.
Подставив
данные из таблицы 6.1, таблицы 6.8 в формулу (6.35) получаем затраты на
электроэнергию (Э):
Э
= 0.7 × [(0.038 × 0.8 × 640) + (0.03 × 0.8 × 640) + (0.02 × 0.8 × 640) + (0.001 × 0.8 × 640] = 31,90 руб.
Подставив
данные из таблицы 6.1 и таблицы и 6.6 в формулу (6.38) получим затраты на
ремонт (Тр):
Тр
= 0.15 × [(5000 × 0.3) + (10000
× 0.3) + (12000 × 0.3) + (13000
× 0.3)] = 1200 руб.
Подставим
данные из таблицы 6.6 в формулу (6.39) и получим затраты на амортизацию (A):
А
= [(5000 × 1.65% × 0,3/100%) +
(10000 × 1.65% × 0,3/100%) +
(12000 ×
× 1.65% × 0,3/100%) + (13000 × 1.65% × 0,3/100%)] = 1980 руб.
Подставив
данные таблицы 6.1, и 6.2 в формулу (6.40) получаем накладные расходы (Нризг):
Нризг
= 2.7 × 6500 × (1 + 0.3) × (1 + 0.7) × 0.04 =
1551,42 руб.
Таблица 6.9 Результирующая таблица для расчетов по статьям калькуляции
|
№ п/п
|
Статьи затрат
|
Затраты на изготовление
|
|
1
|
Материалы (по
спецификации);
|
167825 руб.
|
|
2
|
Покупные комплектующие
изделия, полуфабрикаты и услуги кооперативных предприятий (по спецификации);
|
1 737 302,4 руб.
|
|
3
|
Топливо и электроэнергия на
технологические цели;
|
31,90 руб.
|
|
4
|
Производственная заработная
плата;
|
17550 руб.
|
|
5
|
Доплаты к заработной плате;
|
8950,50 руб.
|
|
6
|
Отчисления на социальные
нужды;
|
9434,18 руб.
|
|
7
|
Износ инструментов и
приспособлений целевого назначения и прочие специальные расходы;
|
1200 руб.
|
|
8
|
Расходы на содержание и
эксплуатацию оборудования;
|
1980 руб.
|
|
9
|
Накладные расходы;
|
1551,42 руб.
|
Находим общую сумму капитальных затрат на изготовление системы:
Кизг = 1 778 000,35 руб.
Подставив расчетные значения Кпрог., Краз. и Кизг определим в общем
случае единовременные затраты на создание системы:
К = 41139,52 руб. + 125560,45 руб. + 1 778 000,35 руб. = 1 944 700,32
руб.
Затраты на амортизацию (А):
А = (1 944 700,32 руб. × 20%) / 100% = 388940,06 руб.
.3 Расчет
обобщающих показателей экономической эффективности
Для обоснования эффективности системы используем метод дисконтирования.
Допустим единовременные затраты осуществлены за 1 год; со 2 года расчетного
периода предприятие получает экономию эксплуатационных затрат, неизменную по
годам.
Чистый доход (ЧДt) рассчитываем по формуле 6.2. Для расчета ЧДt
необходимо определить амортизационные отчисления и величину налогов,
уплачиваемых предприятием из прибыли. Последние рассчитываются по формулам
(6.14, 6.15). Коэффициент дисконтирования рассчитаем при Ен = 0.1. Чистый
дисконтированный доход в t-ом году расчетного периода определяется
произведением ЧДt на коэффициент дисконтирования соответствующего года, и
последовательным накоплением этих величин.
Таблица 6.10 - Данные по старой и новой системам
|
Показатель
|
Значение
|
|
Старая система
|
Новая система
|
|
Время работы системы, час
|
8760
|
8760
|
|
Потери нефти, т/год
|
1790
|
1505
|
|
Расход электроэнергии,
кВт/ч
|
639
|
607
|
|
Численность обслуживающего
персонала: Слесарь
|
2
|
1
|
|
Заработная плата слесаря,
руб./мес
|
6500
|
6500
|
Определим экономию эксплуатационных затрат за счет уменьшения потерь
нефти (таблица 6.10):
Снеф = (1790-1505) · 4200 = 1 197 000 руб./год
Экономия расхода электроэнергии определяется:
Ээл.эн = (639 - 607) · 0,7 · 8760 = 196224 руб.
Экономия заработной платы определяется по формуле:
Эзп = 12 × 6500·(1+0,7)·(1+0,3)·(1+0,356) = 185199,77 руб.
Подставив полученные расчеты по отдельным статьям затрат (Снеф, Ээл.эн,
Эзп) в формулу (6.3) определим общую экономию годовых эксплуатационных затрат в
результате автоматизации:
Э = 1 197 000 + 196224 + 185199,77 = 1 578 423,77 руб.
Жизненный цикл системы равен 5 лет. Расчеты чистого дисконтированного
дохода и показателей эффективности проекта всех годов сводим в таблицу 6.11.
Графический способ расчета срока окупаемости капитальных вложений (Ток)
представлен на рисунке 6.1. Точка пересечения линии НПДДН и оси абсцисс
позволяет определить период окупаемости единовременных затрат. Причем на
графике видно, на какой срок дисконтирование увеличивает период возврата.
Рисунок
6.1 - Определение срока окупаемости проекта
Срок окупаемости проекта составил 1 год 3 месяца.
Далее производим расчет ВНД который представлен в таблице 6.12.
Таблица 6.11 - Расчет дисконтированного дохода и показателей
эффективности проекта
|
ГОД
|
0
|
1
|
2
|
3
|
4
|
5
|
|
Единовременные затраты в
проекте, руб.
|
1944700.32
|
-
|
-
|
-
|
-
|
-
|
|
Экономия эксплутационных
затрат, руб.
|
-
|
1578423.77
|
1578423.77
|
1578423.77
|
1578423.77
|
1578423.77
|
|
Амортизационные отчисления,
руб. (20%)
|
-
|
388940.06
|
388940.06
|
388940.06
|
388940.06
|
388940.06
|
|
Налог на имущество, руб.
(2.2%)
|
-
|
34226.73
|
25670.04
|
17113.36
|
8556.68
|
0.00
|
|
Налог на прибыль, руб (24%)
|
-
|
370607.29
|
372660.89
|
374714.50
|
376768.10
|
378821.70
|
|
Накопленный поток денежной
наличности, руб.
|
-1944700.32
|
1562529.82
|
1569032.90
|
1575535.97
|
1582039.05
|
1588542.13
|
|
Коэффициент дисконтирования
(Е=10%)
|
1.00
|
0.91
|
0.83
|
0.75
|
0.68
|
0.62
|
|
Накопленный поток дисконт.
денежной наличности, руб.
|
-1944700.32
|
-524218.67
|
772502.73
|
1956226.23
|
3036780.19
|
4023139.87
|
Таблица 6.12 - Расчет ВНД
|
ЧД
|
-1944700.32
|
1562529.818
|
1569032.896
|
1575535.973
|
1582039.051
|
1588542.13
|
|
Коэффициент дисконтирования
при Е=0,5
|
1.0000
|
0.6667
|
0.4444
|
0.2963
|
0.1975
|
0.1317
|
|
ЧДД
|
-1944700.32
|
-903013.7749
|
-205665.8213
|
261159.6524
|
573661.1934
|
782851.9264
|
|
Коэффициент дисконтирования
при Е=0,6
|
1.0000
|
0.6250
|
0.3906
|
0.2441
|
0.1526
|
0.0954
|
|
ЧДД
|
-1944700.32
|
-968119.1839
|
-355215.7091
|
29436.62819
|
270836.6299
|
422331.8128
|
|
Коэффициент дисконтирования
при Е=0,7
|
1.0000
|
0.3460
|
0.2035
|
0.1197
|
0.0704
|
|
ЧДД
|
-1944700.32
|
-1025565.13
|
-482647.18
|
-161960.03
|
27458.09
|
139338.52
|
|
Коэффициент дисконтирования
при Е=0,2
|
1.00
|
0.83
|
0.69
|
0.58
|
0.48
|
0.40
|
|
ЧДД
|
-1944700.32
|
-642592.14
|
447014.04
|
1358782.54
|
2121725.76
|
2760125.21
|
|
Коэффициент дисконтирования
при Е=0,3
|
1.00
|
0.77
|
0.59
|
0.46
|
0.35
|
0.27
|
|
ЧДД
|
-1944700.32
|
-742754.31
|
185667.53
|
902798.15
|
1456713.99
|
1884554.57
|
|
Коэффициент дисконтирования
при Е=0,4
|
1.00
|
0.71
|
0.51
|
0.36
|
0.26
|
0.19
|
|
ЧДД
|
-1944700.32
|
-828607.59
|
-28080.61
|
546094.31
|
957912.06
|
1253276.74
|
|
Коэффициент дисконтирования
при Е=0,8
|
1.00
|
0.56
|
0.31
|
0.17
|
0.10
|
0.05
|
|
ЧДД
|
-1944700.32
|
-1076628.20
|
-592358.79
|
-322205.16
|
-171500.32
|
-87431.26
|
|
Коэффициент дисконтирования
при Е=0,9
|
1.00
|
0.53
|
0.28
|
0.15
|
0.08
|
0.04
|
|
ЧДД
|
-1944700.32
|
-1122316.21
|
-687681.05
|
-457977.60
|
-336582.04
|
-272427.01
|
|
Коэффициент дисконтирования
при Е=1
|
1.00
|
0.50
|
0.25
|
0.13
|
0.06
|
0.03
|
|
ЧДД
|
-1944700.32
|
-1163435.41
|
-771177.19
|
-574235.19
|
-475357.75
|
-425715.81
|
Графический способ расчета ВНД представлен на рисунке 6.2.
Рисунок
6.2 - Определение внутренней нормы доходности
На
графике внутренняя норма доходности представлена пересечением кривой ЧДД с
нулевой линией. Для построения кривой зависимости ЧДД и коэффициента
эффективности капитальных вложений зададимся несколькими значениями Е;
рассчитаем для них at;
определим ЧДД и по полученным точкам построим кривую.
Таким
образом, внутренняя норма доходности инвестиционного проекта ВНД = 0.8
Следовательно,
для реализации предложенного проекта можно брать кредит в банке до 80 %
годовых.
На
рисунке 6.2 показано, какое значение должна принять ставка дисконта, чтобы ЧДД
обратился в нуль.
Рентабельность
капитальных вложений:
P = [(4 023
139,87 + 1 944 700,32) / 1944700,32] × 100 % =
306,88 %,
Полученные
результаты свидетельствуют о достаточно высокой экономической эффективности
данного проекта. Следовательно, можно говорить о прибыльности внедрения
разработанной в данном дипломном проекте системы автоматизации.
Таблица
6.13 - Сводная таблица показателей экономической эффективности проекта
|
Показатели
|
Значение показателей
|
|
Капитальные вложения
(инвестиции), руб.
|
1 944 700,32
|
|
Экономия эксплуатационных
затрат, руб.
|
1 578 723,77
|
|
НПДДН, руб.
|
4 023 139,87
|
|
Срок окупаемости, лет
|
1.3
|
|
Внутренняя норма доходности,
%
|
80
|
|
Рентабельность, %
|
306,88
|
Для выявления устойчивости проекта к риску, проведем анализ
чувствительности. В результате экспертной оценки было выявлено, что наиболее
нестабильными параметрами, влияющими на эффективность проекта являются:
) капитальные затраты, причем наиболее вероятно их изменение в пределах [-30%; +20%],
) размер экономии эксплуатационных затрат, пределы вариации этого фактора
[-20%; +20%],
) налог на имущество [-20%; +20%],
) налог на прибыль [-20%;
+20%].
Для построения прямой, отражающей зависимость ЧДД от изменения параметра,
достаточно двух точек. Поэтому пересчет показателя эффективности осуществляется
для крайних значений вариации фактора (т.е. для выявления зависимости ЧДД от
изменения капитальных затрат достаточно рассчитать значение ЧДД при уменьшении
капитальных затрат на 30% и их увеличения на 20%).
Диаграмма “паук” для этого случая представлена на рисунке 6.3.
Рисунок 6.3 - Диаграмма “Паук”
Степень чувствительности проекта к изменению того или иного параметра
определяется углом наклона прямой к оси Х. Если изменения ЧДД, при заданной
вариации параметров, находятся в положительной области, как в данном примере,
то проект не имеет риска. Если значения ЧДД попадают в отрицательную область,
то решение об оптимальном варианте, выбранном на основе критериев, следует
пересмотреть с учетом анализа чувствительности проекта.
Так как полученная фигура располагается в области положительных значений,
ЧДД то проект риска не имеет, т.к. при заданных изменениях параметров значения
ЧДД положительны.
Но проект наиболее чувствителен к изменению экономии эксплутационных
затрат, прослеживается прямая зависимость (с увеличением размера экономии
увеличивается значение ЧДД, и наоборот).
7.
Безопасность и экологичность проекта
В целях обеспечения максимально-безопасных условий труда обслуживающего
персонала, снижения вредности производства, обеспечения противопожарной защиты
на ДНС предусмотрены:
. полная герметизация технологических трубопроводов и оборудования;
. автоматическая аварийная защита технологического оборудования,
позволяющая исключить возможность работы его в аварийных условиях;
. ограждение всех вращающихся частей оборудования защитными кожухами;
. освещение территории площадок и рабочих мест;
. оснащение арматуры обслуживающими площадками;
. для пропарки аппаратов и емкостей, перед вскрытием на ремонт
предусмотрено использование пара ППУ;
. электрооборудование и осветительная арматура устанавливаются во
взрывозащищенном исполнении;
. для снижения аэродинамического шума, насосы устанавливаются в боксах,
которые не являются постоянным рабочим местом машинистов и операторов;
. заземление всех токоведущих частей электрооборудования
.заземление оборудования, емкостей, коммуникаций, в которых возникают
заряды статического электричества;
.защита технологических трубопроводов от статического электричества и
вторичных проявлений молний;
. теплоизоляция трубопроводов;
.оснащенность наглядными плакатами, четкими надписями, табличками, вся
запорная арматура пронумерована;
. насосы снабжены блокировочными устройствами, которые не допускают
повышения давления выше регламентируемого;
.персоналу выдается спецодежда для работы в неблагоприятных условиях или
связанных с загрязнением тела: костюм нефтяника, зимний, летний, сапоги,
валенки, шапка и рукавицы;
.имеется аварийный комплект шланговых противогазов ПШ-1 или ПШ-2, которые
используются при ремонтных работах в аппаратах и емкостях: не зависимо от
этого, технологическим персоналом производится контрольный обход, через каждые
2 часа, осуществляется контроль герметичности и надежности работы
технологического оборудования и трубопроводов.
7.1 Расчет
производственного освещения
Рациональное освещение производственных помещений - один из наиболее
важных факторов, от которых зависит эффективность трудовой деятельности
человека. Без рационального освещения не могут быть созданы оптимальные условия
для общей работоспособности человека и тем более для эффективного
функционирования зрительной системы. Последнее обстоятельство приобретает
особую роль для профессии оператора диспетчерского пульта, где зрительная
система играет главную роль в трудовой деятельности, испытывает наибольшие
нагрузки и зачастую является источником нагрузки.
Исследованиями, проведенными в лабораторных условиях и на производстве,
доказано, что улучшение освещения приводит к повышению производительности
труда. Причем происходит это благодаря совершенствованию условий труда, а не в
результате его интенсификации.
Освещение производственного помещения должно отвечать ряду общих
требований. Важно правильно выбрать источник света и систему освещения, а также
предусмотреть меры защиты от слепящего действия света и устранения бликов.
Необходим достаточный уровень освещенности рабочих поверхностей. Освещенность
должна соответствовать характеру выполняемой работы.
Для оценки производственного освещения используются следующие параметры:
сила света - J; освещенность - E; яркость - L; коэффициент отражения - Q;
коэффициент пульсации - Kn; коэффициент естественной освещенности - KEO.
В зависимости от природы источника световой энергии, различают
естественное, искусственное и совмещенное освещение. При работе с ЭВМ, как
правило применяют одностороннее боковое естественное освещение. Рабочие места
операторов, работающих с дисплеями, располагают подальше от окон и таким
образом, чтобы оконные проемы находились сбоку. Если экран дисплея обращен к
оконному проему, необходимы специальные экранизирующие средства.
В тех случаях, когда одного естественного освещения в помещениях
недостаточно, устраивают совмещенное освещение. При этом дополнительное
искусственное освещение применяют не только в темное, но и в светлое время
суток.
Рекомендуемая освещенность для работы с экраном дисплея составляет 200
Лк, а при работе над документами - 400 Лк. Рекомендуемые яркости в поле зрения
операторов должны лежать в пределах 1:5 ÷ 1:10.
На стадии проектирования основной задачей светотехнических расчетов
является определение требуемой площади светопроемов при естественном освещении
и потребной мощности осветительной установки при искусственном.
Для расчета искусственного освещения используем метод коэффициента
светового потока предназначенного для расчета освещенности общего равномерного
освещения горизонтальных поверхностей.
Расчетное уравнение для данного метода:
Ф = (Ен · Кз · S · Z) /(N · r · v), (7.1)
где Ен - нормируемая минимальная освещенность, Лк (табличные данные);
Кз - коэффициент запаса, учитывающий запыление светильников и износ
источников света в процессе эксплуатации (табличные данные);
Z -
коэффициент неравномерности освещения;
S -
площадь освещаемого помещения;- число светильников, определяемое из условия
создания равномерного освещения всей площади помещения;- коэффициент
использования излучаемого светильником светового потока, который показывает,
какая часть от общего светового потока приходится на расчетную плоскость;-
коэффициент затенения.
По формуле (7.1) рассчитывают световой поток лампы Фл или ламп в
светильнике Фсв, необходимый для создания на рабочих поверхностях освещенности
не ниже нормируемой на все время эксплуатации осветительной установки. Для
расчетов по формуле (7.1) коэффициенты выбираются следующими:
при эксплуатации ЭВМ в помещениях, освещаемых люминесцентными лампами, и
при условии чистки светильников не реже двух раз в год Кз = 1.3...1.5;
при оптимальном расположении светильников (исходя из условия создания
равномерного освещения) коэффициент неравномерности Z = 1.1÷1.2;
коэффициент затемнения v вводится в расчете для помещений с фиксированным
положением работающих, а также при наличии крупногабаритных предметов и
принимается равным 0.8÷0.9;
коэффициент использования светового потока r зависит от типа светильника,
коэффициентов отражения светового потока от стен Qст, пола Qпола, потолка Qп, а
также геометрических размеров помещения и высоты подвеса светильников, что
учитывается одной комплексной характеристикой помещения:
 (7.2)
(7.2)
где
A - длина помещения, м;- ширина помещения, м;- высота подвеса светильников над
рабочей поверхностью, м.
Значения
коэффициента использования светового потока r приведены в светотехнических
справочниках.
Особенностью расчета освещенности от светильников с люминесцентными
лампами является то, что, как правило, заранее известны их тип и мощность.
Поэтому расчет сводится к определению необходимого числа светильников в ряду по
формуле:
 (7.3)
(7.3)
где
n - число рядов светильников, определяемое из условия наиболее выгодного
отношения:
 , (7.4)
, (7.4)
где
L - расстояние между рядами светильников, м;
h - высота
подвеса светильников, м.
Для
облегчения расчетов по методу коэффициентов использования светового потока
разработаны упрощенные формы этого метода с использованием справочных графиков.
Диспетчерская
комната имеет размеры:= 8 м, B = 6 м, высота H = 3 м.
В
помещении предусмотрены потолочные светильники типа УСП35 с двумя
люминесцентными лампами типа ЛБ-40. Необходимо рассчитать требуемое количество
светильников при общем равномерном освещении.
Для
рабочих мест операторов ЭВМ уровень рабочей поверхности над полом составляет
0.725 м. Тогда: h = H - 0.725 = 3 - 0.725=2.225 м.
У
светильников УСП35 наивыгоднейшее отношение f = 1.4. Отсюда, исходя из формулы
(7.4) , расстояние между рядами светильников:= 1.4 · 2.275 = 3.185 м.
Располагаем
светильники вдоль длинной стороны помещения. Расстояние между стенами и
крайними рядами светильников принимаем равным:
l = (0.3÷0.5) L
Пусть
l = 1.3 м. При ширине помещения B = 6 м имеем число рядов светильников;
=
B/L = 6/3 = 2
Пользуясь
справочным материалом, примем коэффициенты отражения светового потока от
потолка, пола, стен соответственно: Qпот = 70%, Qпола = 50%, Qс = 50%.
Затенения
рабочих мест не предусматривается. При работе с экраном ЭВМ и документами
установлена норма освещенности Ен = 400 Лк.
Индекс
помещения согласно формуле (7.2)
С
учетом заданных Qпот, Qпола, Qс, при вычисленном i из справочных данных находим
r = 0.4. Кз принимаем равным 1.4, Z = 1.15. Номинальный световой поток лампы
ЛТБ-40 Фл = 3120Лм, тогда световой поток светильника:
Фсв
= 2 · Фл;
Фсв
= 2 · 3120 = 6240 Лм.
По
формуле (7.3) определяем необходимое число светильников в ряду:
При
длине одного светильника типа УСП35 с лампами ЛТБ-40 lcв = 1.27 м, их общая
длина составит N · lсв = 6 · 1.27 = 7.6 м, т.е. светильники размещаются в
практически сплошной ряд, что является наиболее желательным.
7.2
Пожаробезопасность
Территория ДНС относится к пожаро - взрывоопасной.
К основным причинам пожара и загрязнения относится следующее:
1. нарушение технологического процесса и
неисправность оборудования;
2. короткое замыкание электрических
проводов и перегрев электрооборудования;
3. нарушение правил пожарной безопасности
при производстве электросварочных и других огневых работ.
В качестве первичных средств пожаротушения на ДНС применяют огнетушители
марки ОП-50, предназначенные для тушения начинающихся очагов пожара при
воспламенении горючих веществ твердых и жидких.
Первичны средства пожаротушения (ящик с песком, кошма, огнетушители,
пожарные щиты) установлены в местах и количествах, согласованных с местными
органами Госпожнадзора в соответствии с «Нормами первичных средств
пожаротушения на объектах нефтяной промышленности».
Ко всем сооружениям предусмотрены пожарные проезды.
Насосная внешней перекачки оборудована системой пенотушения - сухотруб с
возможностью подключения к пожарной машине через гайку Богданова и генераторами
пены марки ГПС-600 в количестве трех штук (над каждым насосным агрегатом).
Пожарная часть находится в 3,5 км. от ДНС на ЦПС, с пожарной частью
имеется телефонная связь, с ЦИТС - телефонная и радиосвязь.
Пожарная опасность насосных станций характеризуется пожароопасными
свойствами перекачиваемых жидкостей, их количеством и технологическими
параметрами работы насосов - высоким давлением, большими скоростями потока и
др.
Пары нефти и нефтепродуктов могут оказаться в помещении насосной в
результате неисправности и повреждений насосов или трубопроводов. Утечка
жидкостей может происходить через неплотности фланцевых соединений и сальников.
Особенно часто пары нефтепродуктов скапливаются в траншеях, колодцах,
гидрозатворах, канализационных стоках, так как они тяжелее воздуха. Опасны
механические повреждения насосов и трубопроводов, разрушения трубопроводов при
больших температурных напряжениях, гидроудары.
Источниками зажигания в процессе работы и остановки на ремонт насосных
станций могут быть открытое пламя при огневых, электрогазосварочных работах,
разряды статического электричества при движении жидкостей по трубопроводам и
использовании ременных приводов, искры механического происхождения, тепловые
проявления электрической энергии, самовозгорание пирофоров, обтирочных
материалов, пропитанных маслами, перегрев подшипников насосов и двигателей и
др.
Пожары в насосных, как правило, быстро распространяются, тушить их трудно
из-за большого количества перекачиваемых жидкостей, высокой температуры,
деформации трубопроводов и др.
Классификация взрывоопасных помещений, наружных установок ДНС по пожаро-
и взрывоопасности представлена в таблице 7.1
Таблица 7.1 - Классификация взрывоопасных помещений, наружных установок
по пожаро- и взрывоопасности
|
Наименование объектов
|
Категория взрыво- и
пожароопасности по НПБ 105-95 НПБ 107-97
|
Класс взрывоопасных и
пожароопасных зон по ПУЭ
|
Категория и группа
взрывоопасной смеси по ГОСТ 12.1.011-78
|
|
Площадка технологического
оборудования
|
А
|
В-1г
|
ПА-ТЗ
|
|
Площадка сепараторов
|
А
|
В-1г
|
ПА-ТЗ
|
|
Резервуар сырой нефти V=
2000
|
А
|
В-1г
|
ПА-ТЗ
|
|
Узел задвижек
|
А
|
В-1г
|
ПА-ТЗ
|
|
Дренажная емкость V=24м3
|
А
|
В-1г
|
ПА-ТЗ
|
|
Факел
|
А
|
В-1г
|
П-ТЗ
|
|
Насосная внешней перекачки
нефти
|
А
|
В-1а
|
ПА-ТЗ
|
|
Здание УУН и ТПУ
|
А
|
В-1а
|
ПА-ТЗ
|
7.3
Экологичность проекта
При нормальной работе технологического оборудования возможны постоянные
небольшие утечки загрязняющих веществ в атмосферу. Выброс вредных веществ
происходит:
− на открытых технологических площадках через
запорно-регулирующую арматуру;
− от оборудования, расположенного в блоках, через воздуховоды
и дефлекторы;
− при сжигании газа на факелах через трубы;
− при заполнении емкостей через воздушники и свечи
рассеивания;
− при заполнении резервуаров через дыхательные клапаны;
− при сжигании газа на факеле;
При работе технологического оборудования возможны периодические
непродолжительные по времени (залповые) выбросы, превышающие по мощности
постоянные. Это технически неизбежные выбросы, обусловленные технологическим
регламентом производства.
На основе статистических данных об аварийных ситуациях на объектах
транспортировки нефти целесообразно рассматривать аварию в виде отказа
энергосистемы или порыва трубопроводов.
Максимальный выброс загрязняющих веществ в атмосферу возможен на площадке
ДНС при отключении электроэнергии. При этом вся нефть направляется в резервуары
и отсепарированная газовая фракция сжигается на факеле.
Основными источниками вредных газовыделений на ДНС являются емкости,
сепараторы, резервуары, факела. Основными загрязнителями атмосферы при
транспортировке нефти являются углеводороды, оксиды азота, оксид углерода, сажа,
химреагенты, и т.д..
Вредные вещества, выделяющиеся в атмосферу, отличаются по своим свойствам
и оказывают различное воздействие на окружающую среду.
7.3.1 Расчет
выбросов загрязняющих веществ в атмосферу
Попадая в атмосферу, загрязняющие вещества в зависимости от химических
свойств, токсичности, молекулярной массы ведут себя по-разному. Например,
газообразные выбросы под воздействием атмосферных процессов подвергаются
рассеиванию, распространяясь на значительные расстояния.
Рассчитаем концентрацию загрязняющего вещества в двухметровом слое над
поверхностью земли [19]. Максимальное значение приземной концентрации
загрязняющего вещества (См) для одиночного точечного источника с круглым устьем
при неблагоприятных метеорологических условиях определяется по формуле:
 , мг/ м3
, (7.5)
, мг/ м3
, (7.5)
где
А - коэффициент, зависящий от температурной стратификации атмосферы (для
территории Сибири А = 200);
М
- масса вредного вещества, выбрасываемого в атмосферу в единицу времени,
определяется по формулам, г/с.:
 (7.6)
(7.6)
где КCH = 0,085 - выход углеводорода при
сжигании топлива, кг/ГДж;= 0 - потери теплоты вследствие механической неполноты
сгорания топлива;
В = 50 м3/час = 12 г/с - расход газа;гi = 38,5 -теплота сгорания
природного газа, МДж/кг.
 г/с
г/с
F - безразмерный
коэффициент, учитывающий скорость оседания вредных веществ в атмосферном
воздухе: для газообразных веществ скорость оседания практически равна нулю, F = 1;
η - коэффициент, учитывающий влияние рельефа местности,
для равнин η = 1;
m и n -
коэффициенты, учитывающие условия выхода газовоздушной смеси из источника
выброса (примем m=0.69, n=0.69);
Н
- высота источника выброса над уровнем земли, м (Н=3.5 м);
Объем
газовоздушной смеси, образующейся при сжигании газа, определяется по формуле:
V1 = 10 × V (7.7)
где
V - расход газовоздушной смеси, м3/с, определяется
расчетным путем:
 , м3/с
(7.8)
, м3/с
(7.8)
где
D - диаметр устья источника (D=0.2), м.;
ω - средняя скорость выхода газовоздушной смеси, ω = 7;
 м3/с
м3/с
V1 = 10 × V = 10 × 0.22 = 2.2 м3/с
ΔТ - разность температур отходящих газов и атмосферного
воздуха, 0С, определяется по формуле:
ΔТ = Т от. г. - Т атм. в. (7.9)
ΔТ = 22 - 20=2 0С
Максимальные
значения приземных концентраций углеводорода при неблагоприятных
метеорологических условиях определяются по формуле (7.5):
 = 0,189
мг/ м3
= 0,189
мг/ м3
Определим
значение предельно-допустимого выброса ПДВ для одиночного точечного источника с
круглым устьем по формуле:
 , г/с (7.10)
, г/с (7.10)
где ПДК - предельно допустимая максимально разовая концентрация вещества,
мг/м3: для CH ПДКСH = 300 мг/м3
СФ - фоновая концентрация этого вещества в атмосфере региона, мг/м3 : для
CH СФСН = 130 мг/м3
ПДВ - выбросы, которые при любых метеорологических условиях не создают в
приземном слое концентрации загрязнений, превышающие ПДК.
Сравним фактический выброс загрязняющего вещества с ПДК максимально
разовым (таблица 7.2). Среднесуточные ПДК учитывают пиковые и наименьшие
концентрации атмосферных загрязнений, которые имеют место в течение суток.
Таблица 7.2-Предельно-допустимые, среднесуточные и приземные концентрации
|
Загрязняющее вещество
|
Сф + См., мг/м3
|
ПДК, мг/м3
|
|
Углеводороды (СН)
|
130.189
|
300
|
ПДКм.р > См + Сф
В результате сравнения оказалось, что фактические выбросы углеводородов с
учетом фоновой концентрации не превышают нормативы.
Рассчитаем значение ПДВ для загрязняющих веществ по формуле (7.10):
 = 0.035
г/с = 1.12 т/год;
= 0.035
г/с = 1.12 т/год;
.3.2 Расчет
платы за загрязнение атмосферы выбросами предприятия
Общая плата складывается из суммы плат за допустимые выбросы по каждому
ингредиенту:
 , руб. (7.11)
, руб. (7.11)
где
ППДВi =
ПДВi × Ni × Kэ × Kи , руб.
(7.12)
где
Ni - базовый норматив платы за 1 тонну загрязняющего
вещества в пределах установленных лимитов, руб./т ; для NСН =
50;
Kэ - коэффициент
экологичности ситуации (Западно-Сибирский район, Kэ = 1.2);
Kи - коэффициент
индексации (Kи = 111).
Рассчитаем платы за допустимые выбросы по каждому ингредиенту по формуле
(7.12):
ППДВCН = 1.12 × 50 × 1.2 × 111 = 7459.2 руб.;
7.4 Оценка
чрезвычайной ситуации
Произведём расчёт вероятных параметров ударной волны при взрыве
газовоздушной смеси в резервуаре, объём которого равен V= 1980 м3.
На рисунке 7.1 изображены зоны ударной волны при взрыве газовоздушной
смеси.
Рисунок.
7.1 Зоны ударной волны при взрыве газовоздушной смеси
-
зона детонационной волны; 2 - зона действия продуктов взрыва; 3 - зона ударной
волны; Rспл - радиус зоны смертельного поражения людей; Rбу -
радиус безопасного удаления; RПДВК - радиус предельно допустимой взрывоопасной
концентрации; R1 - радиус зоны детонационной волны; r2 и r3 -
расстояние от центра взрыва до элемента предприятия в зоне ударной волны.
Радиус
детонационной волны определяется по формуле (7.13):
R1= 18.5 ´ ,м (7.13)
,м (7.13)
где
Q - количество газа, т.:
Q=30% × p × V (7.14)
где р - плотность газа = 0,87 м3 / кг;
V -
объем ёмкости = 1980 м3.
Q =
0,03 × 0,87 × 1,98 = 0,05 т.
Определим радиус детонационной волны:
R1 = 18.5 ´ =6,82 м.
=6,82 м.
Ψ= , (7.15)
, (7.15)
где
r2 = 50 м - расстояние от центра взрыва до операторной,
находящейся во 2-ой зоне.
Ψ= = 7.33
= 7.33
По
значению Ψ
определяется избыточное давление во
фронте ударной волны во второй зоне:
∆Рф2
= 9 кПа
Ψ1= , (7.16)
, (7.16)
где
r3 = 100 м - расстояние от центра взрыва до
административного здания, находящегося в 3-ей зоне.
Ψ1= = 14.66
= 14.66
Избыточное
давление во фронте ударной волны в третьей зоне:
∆Рф3
= 4.5 кПа
Найдем
радиус безопасного удаления RБУ

 м
м
Рассчитаем
радиус смертельного поражения людей по формуле (7.17):
RСПЛ=30 (7.17)
(7.17)
RСПЛ = 30  = 11.06 м
= 11.06 м
В случае взрыва газовоздушной смеси в резервуаре на предприятии
прогнозируются разрушения, радиус смертельного поражения людей 11.06 м.
.5 Выводы по
разделу
Разработанная система контроля технологических параметров позволяет
уменьшить вероятность возникновения аварий и чрезвычайных ситуаций, ведущих к
тяжелым экологическим последствиям и возможным человеческим жертвам. Это
достигается путем:
) контроля за значениями технологических параметров;
) оперативного предупреждения дежурного технолога об отклонениях от
заданных уставок или изменениях технологических параметров;
) слежения за загазованностью и пожароопасностью в помещениях;
) уменьшением объема сжигаемого попутного газа на 15%, уменьшаем
количество выбросов в атмосферу;
) увеличением срока службы трубопровода, уменьшается количество возможных
аварий на трубопроводе соединяющим ДНС и ЦПС
Кроме сигнализации о ходе технологического процесса и состоянии
оборудования на автоматические устройства возлагается задача предотвращения
развития аварийных ситуаций в случае их возникновения, то есть автоматическая
защита оборудования и обслуживающего персонала.
Заключение
Исходным объектом для проектирования в данной работе являлась дожимная
насосная станция.
Разработанная система управления устанавливает оперативный контроль над
технологическими процессами, сигнализацию критических значений, повышает
информационность для обслуживающего персонала.
Система разработана на базе контроллера SLC-500-5/03 американской фирмы Allen Bradley. Данный контроллер является высоконадежным и при этом
достаточно недорогим. Как следствие повышается отдача от оборудования.
Комплексный подход, гибкость при настройке и надёжность в работе однозначно
определили выбор данного контроллера для системы.
Все датчики, вторичные приборы и исполнительные механизмы отвечают
необходимым требованиям по условиям эксплуатации, точности, надёжности и
ремонтопригодности.
В экономической части проекта произведен расчет капитальных вложений для
внедрения новой системы автоматизации и определен значительный экономический
эффект от ее внедрения. По расчетам произведенным в этом разделе можно сказать,
что проект окупит себя через 1,3 года, при этом его рентабельность составит 306
%. Также можно сказать, что данная система окупит себя, если взять банковский
кредит под процентную ставку не более 80 %.
В разделе по безопасности и экологичности проекта выполнены расчеты по
естественному и искусственному освещению, произведен расчет предельно
допустимых выбросов, осуществлено прогнозирование возможных чрезвычайных
ситуаций.
Данный проект обеспечит минимальное вмешательство человека в
технологический процесс.
Приборы и контроллер достаточно надежны и современны, что гарантирует
безотказную и эффективную работу технологического процесса.
Список
использованных источников
1. Лутошкин Г.С. Сбор и подготовка
нефти, газа и воды к транспорту. - М.: Недра, 1972. - 325 с.
2. Технологический регламент ДНС
Ватьеганского месторождения
3. Каталог концерна "Метран" ,
2000.
4. Каталог ЗАО "Альбатрос",
2000.
Интернет ресурс www.adastra.ru
<#"656445.files/image153.gif">
Рисунок
А.1 - Генеральный план
Приложении
Б
Рисунок
Б.1 - Схема автоматизации
Таблица
В.1 - Таблица КИПиА
|
№
|
Наименование параметра
|
Обозн.
|
сигнал
|
Датчик, исполнительный
механизм
|
Выходной сигнал датчика
|
Пределы измерения датчика
|
Размер-ть.
|
Класс точности
|
|
|
|
DI
|
DO
|
AI
|
AO
|
FI
|
|
|
|
|
|
|
Установка передварительного
отбора газа (УПОГ)
|
|
|
|
|
|
|
|
|
|
|
|
|
1
|
Температура на входе УПОГ
|
TT-1
|
|
|
+
|
|
|
ТСМУ-055/2
|
4-20 мА
|
0..100
|
|
0.5
|
|
2
|
Состояние задвижки на входе
УПОГ (открыта)
|
NS-2
|
+
|
|
|
|
|
|
24 В
|
-
|
-
|
|
|
3
|
Состояние задвижки на входе
УПОГ (закрыта)
|
NS-2
|
+
|
|
|
|
|
|
24 В
|
-
|
-
|
|
|
4
|
Управление задвижкой на
входе УПОГ (открыть)
|
NS-2
|
|
+
|
|
|
|
МЭП 39033-01
|
24 В
|
-
|
-
|
|
|
5
|
Управление задвижкой на
входе УПОГ (закрыть)
|
NS-2
|
|
+
|
|
|
|
|
24 В
|
-
|
-
|
|
|
Газовый сепаратор (ГС1)
|
|
|
|
|
|
|
|
|
|
|
|
|
6
|
Избыточное давление газа в
Г-1
|
РТ-3
|
|
|
+
|
|
|
Метран - 100ДИ-Ex1160
|
4-20 мА
|
0..0,6
|
МПа
|
1
|
|
7
|
Сигнализация уровня в Г-1
(min)
|
LЕ-5
|
+
|
|
|
|
|
СУР 4
|
24 В
|
0,15..0,3
|
м
|
|
|
8
|
Сигнализация уровня в Г-1
(max)
|
LЕ-5
|
+
|
|
|
|
|
СУР 4
|
24 В
|
0,15..0,3
|
м
|
|
|
9
|
Регулирование давления в
Г-1
|
NS-4
|
|
|
|
+
|
|
БУЭП-1
|
4-20 мА
|
0..100
|
%
|
|
|
Узел учета газа на ЦПС
|
|
|
|
|
|
|
|
|
|
|
|
|
10
|
Давление газа на УУГ (ЦПС)
|
РТ-10
|
|
|
+
|
|
|
Метран - 100ДИ-Ex1160
|
4-20 мА
|
0..0,6
|
МПа
|
1
|
|
11
|
Температура газа на УУГ (
ЦПС)
|
ТТ-13
|
|
|
+
|
|
|
ТСМУ-055/2
|
4-20 мА
|
0..100
|
|
0.5
|
|
12
|
Расход газа на УУГ ( ЦПС)
|
FT-12
|
|
|
+
|
|
|
GFM700-DN-150
|
4-20 мА
|
300..1700
|
м3/ч
|
|
|
13
|
Регул. давления газа на УУГ
( ЦПС)
|
NS-11
|
|
|
|
+
|
|
БУЭП-1
|
4-20 мА
|
0..100
|
%
|
|
|
Узел учета газа на факел
|
|
|
|
|
|
|
|
|
|
|
|
|
14
|
Давление газа на УУГ
(факел)
|
РТ-6
|
|
|
+
|
|
|
Метран - 100ДИ-Ex1160
|
4-20 мА
|
0..0,6
|
МПа
|
1
|
|
15
|
Температура газа на УУГ
(факел)
|
TT-7
|
|
|
+
|
|
|
ТСМУ-055/2
|
4-20 мА
|
0..100
|
|
0.5
|
|
16
|
Расход газа на УУГ (факел)
|
FT-8
|
|
|
+
|
|
|
GFM700-DN-150
|
4-20 мА
|
300..1700
|
м3/ч
|
|
|
17
|
Клапан сброса газа на УУГ
(факел) - открыть
|
NS-9
|
|
+
|
|
|
|
|
24 В
|
-
|
-
|
|
|
18
|
Клапан сброса газа на УУГ
(факел) - закрыть
|
NS-9
|
|
+
|
|
|
|
|
24 В
|
-
|
-
|
|
|
Площадка сепарации нефти
первой ступени
|
|
|
|
|
|
|
|
|
|
|
|
|
19
|
Температура в С-1/1
|
ТТ-17
|
|
|
+
|
|
|
ТСМУ-205Ех
|
4-20 мА
|
0..150
|
|
0.5
|
|
7
|
резерв
|
|
|
|
|
|
|
|
|
|
|
Всего: 30, резерв 2
|
|
|
|
|
|
|
|
|
|
|
10 1746-NO4I
|
0
|
Регулирование давления в
ГС1
|
NS-4
|
|
|
|
+
|
|
БУЭП-1
|
4-20 мА
|
|
|
1
|
Регул. давления газа на УУГ
( ЦПС)
|
NS-11
|
|
|
|
+
|
|
БУЭП-1
|
4-20 мА
|
|
|
2
|
Регул. уровня жидкости в С-
1/1
|
NS-16
|
|
|
|
+
|
|
БУЭП-1
|
4-20 мА
|
|
|
3
|
Регул. уровня жидкости в С-
1/2
|
NS-21
|
|
|
|
+
|
|
БУЭП-1
|
4-20 мА
|
|
|
11 1746-NO4I
|
0
|
Регул. уровня жидкости в С-
2/1
|
NS-26
|
|
|
|
+
|
|
БУЭП-1
|
4-20 мА
|
|
|
1
|
Управление насосом №1
|
NS-43
|
|
|
|
+
|
|
БУЭП-1
|
4-20 мА
|
|
|
2
|
Управление насосом №2
|
NS-57
|
|
|
|
+
|
|
БУЭП-1
|
4-20 мА
|
|
|
3
|
Управление насосом №3
|
NS-65
|
|
|
|
+
|
|
БУЭП-1
|
4-20 мА
|
|
|
12 1746-NO4I
|
0
|
резерв
|
|
|
|
|
|
|
|
|
|
|
1
|
резерв
|
|
|
|
|
|
|
|
|
|
|
2
|
резерв
|
|
|
|
|
|
|
|
|
|
|
3
|
резерв
|
|
|
|
|
|
|
|
|
|
|
Всего: 8, резерв 4
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Приложение Д
Рисунок Д.1 - Подпрограмма генерации уровня в С-1/1,2
Рисунок Д.2 - Подпрограмма генерации уровня в С-2/1
Рисунок Д.3 - Подпрограмма генерации давления в С1/1,2
Рисунок Д.4 - Подпрограмма генерации давления в С-2/1
Рисунок Д.5 - Подпрограмма генерации уровня в ГС-1
Рисунок Д.6 - Подпрограмма генерации давления в ГС-1
Рисунок Д.7 - Подпрограмма генерации температуры
Рисунок Д.8 - Подпрограмма генерации уровня в ДЕ-1
Рисунок Д.9 - Подпрограмма генерации уровня в РВС
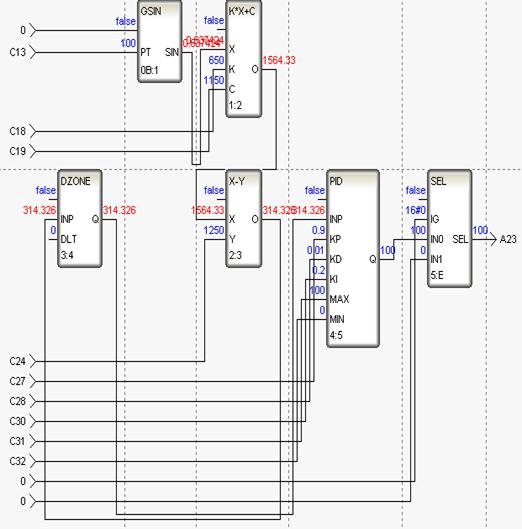
Рисунок Д.10 - Подпрограмма ПИД - регулирования уровня в С-1/1,2
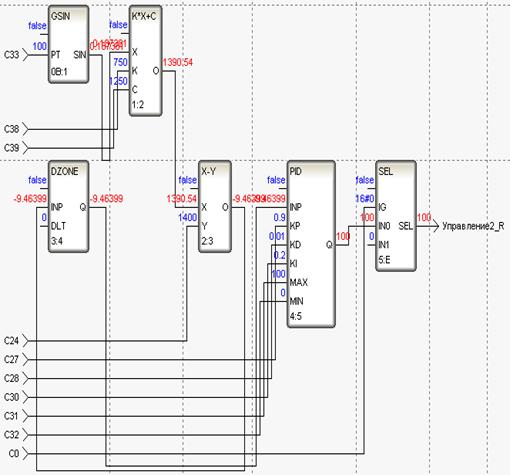
Рисунок Д.11 - Подпрограмма ПИД - регулирования уровня в С-2/1
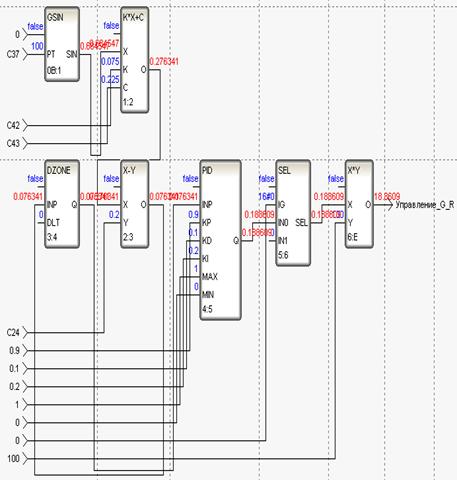
Рисунок Д.12 - Подпрограмма ПИД - регулирования давления в ГС-1
Приложение Е

Рисунок Е.1 - Иерархия HMI
Приложение Ж
Таблица Ж.1 - Таблица каналов НMI
|
Имя тэга
|
Тип тэга
|
Комментарии
|
|
z_upog_o
|
Digital
|
Состояние задвижки на входе
УПОГ (открыта)
|
|
z_upog_z
|
Digital
|
Состояние задвижки на входе
УПОГ (закрыта)
|
|
u_gs_min
|
Digital
|
Сигнализация уровня в ГС1
(min)
|
|
u_gs_max
|
Digital
|
Сигнализация уровня в ГС1
(max)
|
|
u_s1/1_max
|
Digital
|
Сигнализация уров. жидкости
в С- 1/1 (max)
|
|
u_s1/1_min
|
Digital
|
Сигнализация уров. жидкости
в С- 1/1 (min)
|
|
u_s1/2_max
|
Digital
|
Сигнализация уров. жидкости
в С- 1/2 (max)
|
|
u_s1/2_min
|
Digital
|
Сигнализация уров. жидкости
в С- 1/2 (min)
|
|
u_s2/1_max
|
Digital
|
Сигнализация уров. жидкости
в С-2/1 (max)
|
|
u_s2/1_min
|
Digital
|
Сигнализация уров. жидкости
в С-2/1 (min)
|
|
u_rez_max
|
Digital
|
Сигнализация уров. жидкости
в резервуаре (max)
|
|
u_rez_min
|
Digital
|
Сигнализация уров. жидкости
в резервуаре (min)
|
|
z_rez_vh_o
|
Digital
|
Состояние задвижки на входе
резервуара (открыта)
|
|
z_rez_vh_z
|
Digital
|
Состояние задвижки на входе
резервуара (закрыта)
|
|
z_rez_ex_o
|
Digital
|
Состояние задвижки на
выходе резервуара (открыта)
|
|
z_rez_ex_z
|
Digital
|
Состояние задвижки на
выходе резервуара (закрыта)
|
|
u_de_max
|
Digital
|
Сигнализация уровня
жидкости в ДЕ-1 (max)
|
|
u_de_min
|
Digital
|
Сигнализация уровня
жидкости в ДЕ-1 (min)
|
|
nas_de
|
Digital
|
Состояние насоса для
откачки жидкости из ДЕ-1 (работает / не работает)
|
|
p_vh_n1_max
|
Digital
|
Давление на входе насоса №1
(max)
|
|
p_vh_n1_min
|
Digital
|
Давление на входе насоса №1
(min)
|
|
z_vh_n1_o
|
Digital
|
Состояние задвижки на входе
насоса №1 (открыта )
|
Digital
|
Состояние задвижки на входе
насоса №1 (закрыта)
|
|
p_ex_n1_max
|
Digital
|
Давление на выходе насоса
№1 (max)
|
|
p_ex_n1_min
|
Digital
|
Давление на выходе насоса
№1 (min)
|
|
z_ex_n1_o
|
Digital
|
Состояние задвижки на
выходе насоса №1 (открыта)
|
|
z_ex_n1_z
|
Digital
|
Состояние задвижки на
выходе насоса №1 (закрыта)
|
|
u_sal_n1
|
Digital
|
Утечка сальников насоса №1
|
|
sost_n1
|
Digital
|
Состояние насоса №1
(работает / неработает)
|
|
p_vh_n2_max
|
Digital
|
Давление на входе насоса №2
(max)
|
|
p_vh_n2_min
|
Digital
|
Давление на входе насоса №2
(min)
|
|
z_vh_n2_o
|
Digital
|
Состояние задвижки на входе
насоса №2 (открыта)
|
|
z_vh_n2_z
|
Digital
|
Состояние задвижки на входе
насоса №2 (закрыта)
|
|
p_ex_n2_max
|
Digital
|
Давление на выходе насоса
№2 (max)
|
|
p_ex_n2_min
|
Digital
|
Давление на выходе насоса
№2 (min)
|
|
z_ex_n2_o
|
Digital
|
Состояние задвижки на
выходе насоса №2 (открыта)
|
|
z_ex_n2_z
|
Digital
|
Состояние задвижки на
выходе насоса №2 (закрыта)
|
|
u_sal_n2
|
Digital
|
Утечка сальников насоса №2
|
|
sost_n2
|
Digital
|
Состояние насоса №2
(работает / не работает)
|
|
contr_nas
|
Digital
|
Контроль работы прибора
СТМ-10 в помещении насосной
|
|
p_vh_n3_max
|
Digital
|
Давление на входе насоса №3
(max)
|
|
p_vh_n3_min
|
Digital
|
Давление на входе насоса №3
(min)
|
|
z_vh_n3_o
|
Digital
|
Состояние задвижки на входе
насоса №3 (открыта)
|
|
z_vh_n3_z
|
Digital
|
Состояние задвижки на входе
насоса №3 (закрыта)
|
|
p_ex_n3_max
|
Digital
|
Давление на выходе насоса
№3 (max)
|
|
p_ex_n3_min
|
Digital
|
Давление на выходе насоса
№3 (min)
|
|
z_ex_n3_o
|
Digital
|
Состояние задвижки на
выходе насоса №3 (открыта)
|
|
z_ex_n3_z
|
Digital
|
Состояние задвижки на
выходе насоса №3 (закрыта)
|
|
u_sal_n3
|
Digital
|
Утечка сальников насоса №3
|
|
Продолжение таблицы Ж.1
|
|
sost_n3
|
Digital
|
Состояние насоса №3
(работает / не работает)
|
|
contr_dvigat
|
Digital
|
Контроль работы прибора
СТМ-10 в помещении двигателей
|
|
signaliz_nas
|
Digital
|
Пожарная сигнализация в
насосной
|
|
gas_nas_20
|
Digital
|
Загазованность помещения в
насосной 20%
|
|
gas_nas_40
|
Digital
|
Загазованность помещения в
насосной 40%
|
|
sost_v1
|
Digital
|
Состояние вентилятора В-1
(работает / не работает)
|
|
signaliz_dvigat
|
Digital
|
Пожарная сигнализация в
помещении двигателей
|
|
gas_dvigat_20
|
Digital
|
Загазованность помещения в
помещении двигателей 20%
|
|
gas_dvigat_40
|
Digital
|
Загазованность помещения в
помещении двигателей 40%
|
|
sost_v2
|
Digital
|
Состояние вентилятора В-2
(работает / не работает)
|
|
alarm_nas
|
Digital
|
Несанкционированный доступ
в НС
|
|
signaliz_operator
|
Digital
|
Пожарная сигнализация в
операторной
|
|
alarm_operator
|
Digital
|
Несанкционированный доступ
в операторную
|
|
upr_z_vh_upog_o
|
Digital
|
Управление задвижкой на
входе УПОГ (открыть)
|
|
upr_z_vh_upog_z
|
Digital
|
Управление задвижкой на
входе УПОГ (закрыть)
|
|
klapan_o
|
Digital
|
Клапан сброса газа на УУГ
(факел) - открыть
|
|
klapan_z
|
Digital
|
Клапан сброса газа на УУГ
(факел) - закрыть
|
|
upr_z_vh_rez_o
|
Digital
|
Управление задвижкой на
входе резервуара (открыть)
|
|
upr_z_vh_rez_z
|
Digital
|
Управление задвижкой на
входе резервуара (закрыть)
|
|
upr_z_ex_rez_o
|
Digital
|
Управление задвижкой на
выходе резервуара (открыть)
|
|
upr_z_ex_rez_z
|
Digital
|
Управление задвижкой на
выходе резервуара (закрыть)
|
|
upr_nas_de_vkl
|
Digital
|
Управление насосом для
откачки жидкости из ДЕ-1 (включить)
|
|
upr_nas_de_vikl
|
Digital
|
Управление насосом для
откачки жидкости из ДЕ-1 (выключить)
|
|
upr_z_vh_n1_o
|
Digital
|
Управление задвижкой на
входе насоса №1 (открыть)
|
|
upr_z_vh_n1_z
|
Digital
|
Управление задвижкой на
входе насоса №1 (закрыть)
|
|
upr_z_ex_n1_o
|
Digital
|
Управление задвижкой на
выходе насоса №1 (открыть)
|
|
upr_z_ex_n1_z
|
Digital
|
Управление задвижкой на
выходе насоса №1 (закрыть)
|
|
upr_z_vh_n2_o
|
Digital
|
Управление задвижкой на
входе насоса №2 (открыть)
|
|
upr_z_vh_n2_z
|
Digital
|
Управление задвижкой на
входе насоса №2 (закрыть)
|
|
upr_z_ex_n2_o
|
Digital
|
Управление задвижкой на
выходе насоса №2 (открыть)
|
|
upr_z_ex_n2_z
|
Digital
|
Управление задвижкой на
выходе насоса №2 (закрыть)
|
|
upr_z_vh_n3_o
|
Digital
|
Управление задвижкой на
входе насоса №3 (открыть)
|
|
upr_z_vh_n3_z
|
Digital
|
Управление задвижкой на
входе насоса №3 (закрыть)
|
|
upr_z_ex_n3_o
|
Digital
|
Управление задвижкой на
выходе насоса №3 (открыть)
|
|
upr_z_ex_n3_z
|
Digital
|
Управление задвижкой на
выходе насоса №3 (закрыть)
|
|
upr_v1_vkl
|
Digital
|
Управление вентилятором В-1
(включить)
|
|
upr_v1_vikl
|
Digital
|
Управление вентилятором
В-1(выключить)
|
|
upr_v2_vkl
|
Digital
|
Управление вентилятором В-2
(включить)
|
|
upr_v2_vikl
|
Digital
|
Управление вентилятором В-2
(выключить)
|
|
t_upog
|
Analog
|
Температура на входе УПОГ
|
|
PGas1
|
Analog
|
Избыточное давление газа в
ГС1
|
|
Poutgas
|
Analog
|
Давление газа на УУГ (ЦПС)
|
|
Pgasfakel
|
Analog
|
Температура газа на УУГ (
ЦПС)
|
|
Rgas
|
Analog
|
Расход газа на УУГ ( ЦПС)
|
|
P_gas_fakel
|
Analog
|
Давление газа на УУГ
(факел)
|
|
T_gas_fakel
|
Analog
|
Температура газа на УУГ
(факел)
|
|
Rgasfak
|
Analog
|
Расход газа на УУГ (факел)
|
|
TSep1/1
|
Analog
|
Температура в С-1/1
|
|
PSep1/1
|
Analog
|
Избыточное давление в С-
1/1
|
|
LSep1/1
|
Analog
|
Уровень жидкости в С- 1/1
|
|
Tsep1/2
|
Analog
|
Температура в С- 1/2
|
|
PSep1/2
|
Analog
|
Избыточное давление в С-
1/2
|
|
LSep1/2
|
Analog
|
Уровень жидкости в С- 1/2
|
|
TSep2/1
|
Analog
|
Температура в С-2/1
|
|
PSep2/1
|
Analog
|
Избыточное давление в С-2/1
|
|
LSep2/1
|
Analog
|
Уровень жидкости в С-2/1
|
|
LRez
|
Analog
|
Уровень жидкости в
резервуаре
|
|
Tde
|
Analog
|
Температура в ДЕ-1
|
|
L_de
|
Analog
|
Уровень жидкости в ДЕ-1
|
|
Pde
|
Analog
|
Давление на выходе ДЕ-1
|
|
P_filtr1
|
Analog
|
Перепад давления на фильтре
№1
|
|
P_filtr2
|
Analog
|
Перепад давления на фильтре
№2
|
|
P_filtr3
|
Analog
|
Перепад давления на фильтре
№3
|
|
T_podsh_n1
|
Analog
|
Темп. подшипников насоса №1
|
|
T_podsh_n2
|
Analog
|
Темп. подшипников насоса №2
|
|
T_podsh_n3
|
Analog
|
Темп. подшипников насоса №3
|
|
Toutoil
|
Analog
|
Температура жидкости на
выходе ДНС
|
|
Poutoil
|
Analog
|
Давление на выходе ДНС
|
|
M_out
|
Analog
|
Влагосодержание на выходе
ДНС
|
|
P_regul_gs
|
Analog
|
Регулирование давления в
ГС1
|
|
P_regul_gas_cps
|
Analog
|
Регул. давления газа на УУГ
( ЦПС)
|
|
U_regul_s1/1
|
Analog
|
Регул. уровня жидкости в С-
1/1
|
|
U_regul_s1/2
|
Analog
|
Регул. уровня жидкости в С-
1/2
|
|
U_regul_s2/1
|
Analog
|
Регул. уровня жидкости в С-
2/1
|
|
upr_n1
|
Analog
|
Управление насосом №1
|
|
upr_n2
|
Analog
|
Управление насосом №2
|
|
upr_n3
|
Analog
|
Управление насосом №3
|
Приложение И
Рисунок
И.1 - Блок-схема основной программы
Рисунок
И.2 - Блок-схема подпрограммы пуска насоса
Рисунок
И.3 - Блок-схема подпрограммы остановки насоса
Рисунок
И.4 - Блок-схема подпрограммы управления насосом
Рисунок
И.5 - Блок-схема подпрограммы управления сепаратором С-1
Приложение К


Рисунок К.1 - Структурная схема организации Web - интерфейса