Исследование цифровых СУЭП с апериодическими регуляторами состояния и регуляторами класса 'вход-выход'
Министерство образования и науки
Российской Федерации
Федеральное государственное бюджетное
образовательное учреждение
высшего профессионального образования
«Пермский национальный
исследовательский политехнический университет»
Кафедра микропроцессорных средств
автоматизации
КУРСОВАЯ РАБОТА
по дисциплине «Системы управления
электроприводов»
Тема: Исследование цифровых СУЭП с
апериодическими регуляторами состояния и регуляторами класса «вход-выход»
Вариант: б - а - 12
Пермь 20__ г.
Содержание
1. Аннотация
2. Индивидуальное задание
. Математическое описание электромеханических объектов
(ЭМОУ), процедура синтеза ЭМСУ и решение задачи подготовки данных к
использованию компьютерной программы исследования цифровых СУЭП с регуляторами
состояния.
4. Синтез и анализ САР скорости СУЭП с апериодическими регуляторами
состояния.
5. Синтез и анализ САР положения СУЭП с апериодическими
регуляторами состояния.
6. Синтез и анализ САР скорости СУЭП с регуляторами класса «вход-выход».
Заключение
Список использованной литературы
1. Аннотация
Цель работы: исследование оптимальных по критерию быстродействия цифровых
электромеханических систем управления с апериодическими регуляторами состояния
и типовых СУЭП с регуляторами класса «вход-выход».
В курсовой работе представлены результаты математического описания,
синтеза и анализа СУЭП, причем ориентированных как на типовые, так и на
нетиповые решения. При этом рассмотрены задачи исследования СУЭП применительно
к 2-м основным координатам электропривода - скорости и положения вала рабочего
органа.
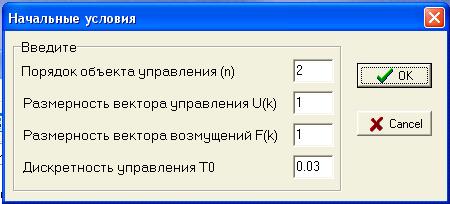
2. Индивидуальное задание
Вариант: б - а - 12
управление регулятор электромеханический вал
|
№ вари- анта
|
Параметры ЭМСУ и их
размерности
|
|
Uян (В)
|
Iян (А)
|
l (о.е.)
|
wн
(1/с)
|
Uу, max (В)
|
Rэ (Ом)
|
Кд (Вс)
|
Тэ (с)
|
Тм (с)
|
Ктп (о.е.)
|
Ттп (с)
|
Кт (Ом)
|
Тmт (с)
|
Кj (о.е.)
|
Т (с)
|
|
12
|
110
|
75
|
8
|
105
|
10
|
0,1
|
1,024
|
0,015
|
0,25
|
20
|
0,0075
|
0,017
|
0,01
|
10
|
0,03
|
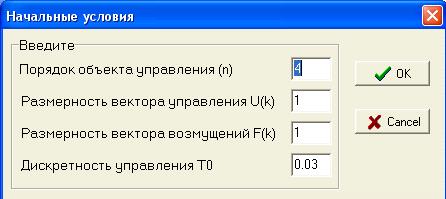
3. Математическое описание электромеханических
объектов (ЭМОУ)
Краткие теоретические положения.
Пусть линейный стационарный объект управления описывается
дискретно-непрерывным векторно-матричным уравнением
 (1)
(1)
где
 – векторы состояния, управления и возмущения
соответственно размерности
– векторы состояния, управления и возмущения
соответственно размерности  ;
;
 –
матрицы состояния, управления, возмущения размерности
–
матрицы состояния, управления, возмущения размерности  соответственно;
соответственно;
T – такт
дискретного управления;
k – номер такта
дискретного управления.
 (2)
(2)
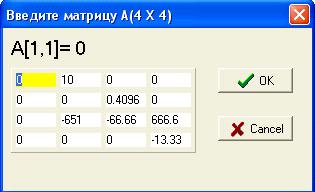
В
этом уравнении  – матрицы соответственно размерности
– матрицы соответственно размерности  , определение которых и является задачей синтеза.
, определение которых и является задачей синтеза.
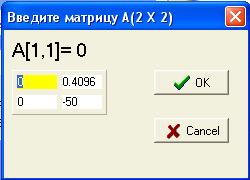
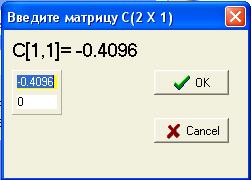
Синтез свободного управляемого движения дискретно-непрерывной ЭМСУ
Управляемый
свободный процесс в системе определяется парой матриц A, B
объекта управления и матрицей  регулятора
состояния, призванной обеспечивать оптимальность переходных свободных движений
при произвольных начальных значениях вектора состояния X(0). На первом
этапе синтеза будем полагать равными нулю все внешние аддитивные воздействия
регулятора
состояния, призванной обеспечивать оптимальность переходных свободных движений
при произвольных начальных значениях вектора состояния X(0). На первом
этапе синтеза будем полагать равными нулю все внешние аддитивные воздействия  . Тогда управление свободным движением примет вид
. Тогда управление свободным движением примет вид
 .
(3)
.
(3)
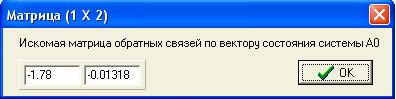
Для
нахождения матрицы воспользуемся теоремой об n интервалах
дискретного управления в сочетании с принципом оптимальности Беллмана [1]. Не
снижая общности выкладок будем полагать, что оптимальное свободное движение
системы завершается через n тактов дискретного управления в нулевой точке
пространства состояний  . Сформируем расширенный вектор-столбец состояния
. Сформируем расширенный вектор-столбец состояния
(t) = col [X(t), U(kT)], (4)
и перепишем уравнение для случая управляемого свободного движения в виде
 (5)
(5)
где
D – матрица управляемого состояния размерности (n+m)´(n+m),
 .
(6)
.
(6)
Зададимся
некоторой произвольной дискретной управляющей последовательностью U(kT), k = –1, –2,
... , –n, и рассмотрим движение системы в обратном времени, т.
е. примем конечное нулевое состояние системы за начальное. Проинтегрируем
уравнение (5) при нулевых начальных условиях X(0) = 0,
воспользовавшись аппаратом переходных матриц состояния. Тогда получим векторное
дискретное уравнение состояния
 (7)
(7)
где
 – расширенная обратная матрица перехода.
– расширенная обратная матрица перехода.
Сформируем
матрицы дискретного управления W размерности  и
дискретного состояния G размерности
и
дискретного состояния G размерности  в виде
в виде
W = [ U(-T) U(-2T) ... U(-nT) ] ,
(8)= [ X(-T) X(-2T) ... X(-nT) ]
. (9)
Поскольку
не наложены какие-либо ограничения на множества управляющих воздействий и
дискретные состояния системы, а также, по определению, система находилась в
нулевом начальном состоянии, очевидно, что ее движение в обратном (по отношению
к принятому при синтезе) направлении будет носить оптимальный по быстродействию
апериодический характер. Следовательно, с учетом выражения (2) искомая матрица определится в виде
 .
(10)
.
(10)
Решение
векторно-матричного уравнения (10) будет единственным при полном ранге матрицы G, т.
е. если rank(G) = n.
Синтез
вынужденного управляемого движения дискретно-непрерывной ЭМСУ
На
втором этапе синтеза определим матрицы  , d, входящие в выражение (2), для чего рассмотрим вынужденное движение
системы.
, d, входящие в выражение (2), для чего рассмотрим вынужденное движение
системы.
Представим
вектор-столбец установившихся состояний САУ в виде
 (11)
(11)
где
 – подвектор размерности m´1, определяющий заданное
установившееся состояние системы, т. е.
– подвектор размерности m´1, определяющий заданное
установившееся состояние системы, т. е.  ,
,
 –
подвектор размерности (n-m)´1, включающий в себя
остальные координаты состояния системы управления.
–
подвектор размерности (n-m)´1, включающий в себя
остальные координаты состояния системы управления.
Соответствующую
матрицу установившихся состояний представим в виде блочной матрицы
 (12)
(12)
где
 – подматрицы соответственно размерности
– подматрицы соответственно размерности  .
.
Представим все аддитивные воздействия на систему в виде обобщенного
вектора-столбца размерности (2m+d)´1 задающих и возмущающих воздействий,
т.е.
 , (13)
, (13)
и
зададимся численными значениями его 2 компонент 2 раз, из которых сформируем неособую матрицу Q
аддитивных воздействий размерностью (2m+d)´(2m+d) в виде
компонент 2 раз, из которых сформируем неособую матрицу Q
аддитивных воздействий размерностью (2m+d)´(2m+d) в виде
 . (14)
. (14)
Тогда,
с учетом введенных обозначений (2…14) уравнение (1) для квазиустановившихся
состояний системы ( ) можно переписать в виде
) можно переписать в виде
 . (15)
. (15)
Подставим
векторы  установившихся состояний в уравнение (2) и выразим
искомую блочную матрицу
установившихся состояний в уравнение (2) и выразим
искомую блочную матрицу
 . (16)
. (16)
Матрицы
d, b, g определяются
однозначно при полном ранге матрицы Q, что легко обеспечить
соответствующим заданием значений аддитивных воздействий, либо формированием
заведомо невырожденных матриц размерности (2m+d)´ (2m+d).
Таким
образом, результирующее дискретное управление в форме (2) представляет собой
регулятор состояния, обеспечивающий комбинированное апериодическое управление
по отклонению выходной координаты от заданного значения и по возмущающим
воздействиям, а также астатизм первого порядка по задающим воздействиям
(квази-инвариантность системы по задающим воздействиям).
Расчетная
часть
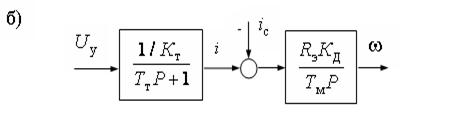
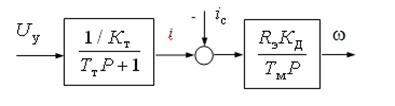
Составим общее дифференциальное уравнение для ЭМОУ скорости, схемы «б»:
Составим общее дифференциальное уравнение для ЭМОУ положения, схемы «а»:
.
Синтез и анализ САР скорости СУЭП с апериодическими регуляторами состояния
Синтез
САР скорости:

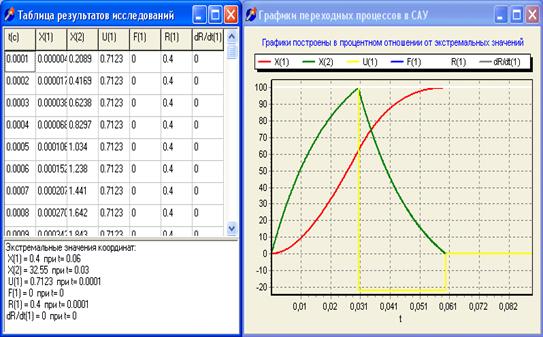
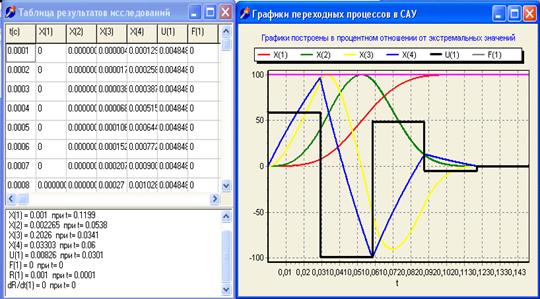
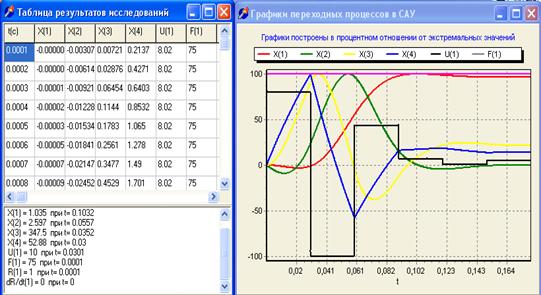
Анализ
САР скорости:
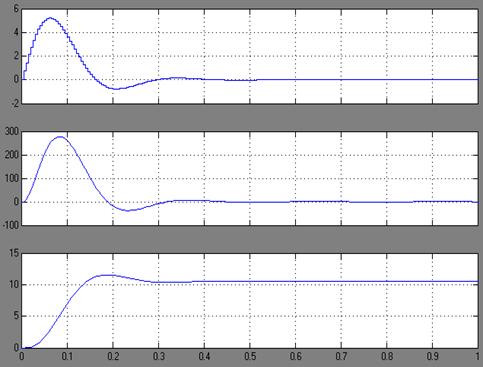
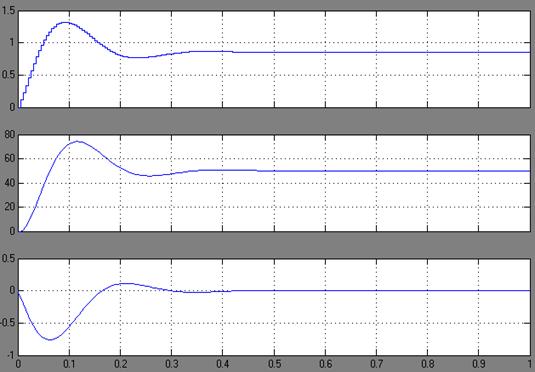
1) Ступенчатое задание в «малом»
) Ступенчатое задание нагрузки на валу двигателя принимается номинальному
значению:
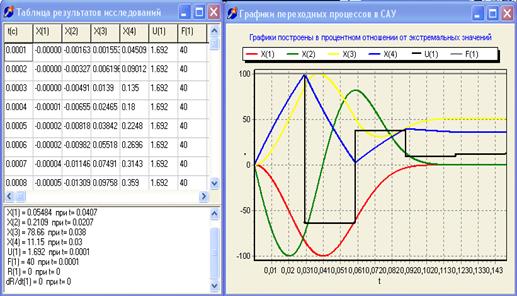
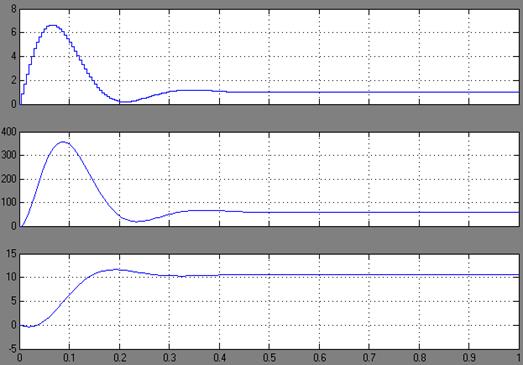
) Пуск в «малом» под нагрузкой:
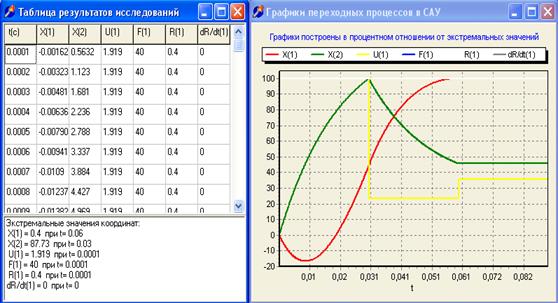
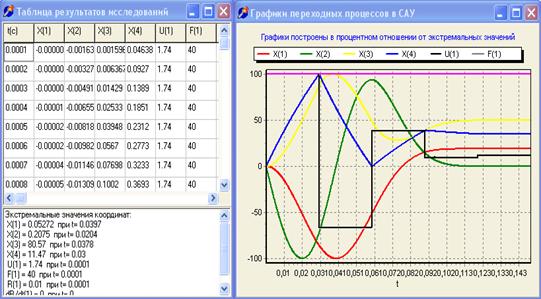
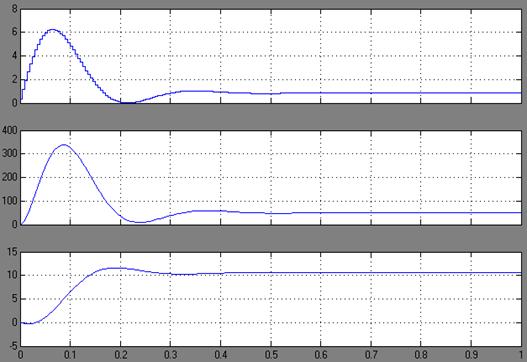
) Пуск в «большом» под нагрузкой:
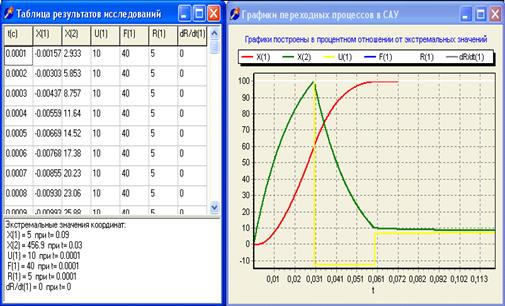
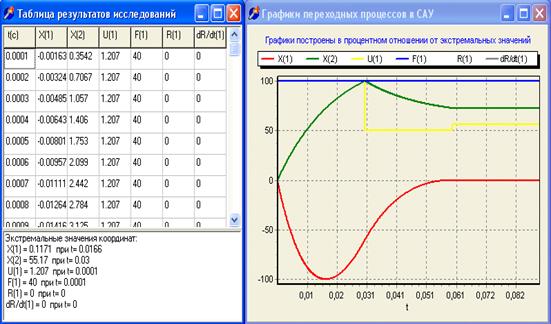
5. Синтез и анализ САР положения СУЭП
Синтез САР положения:
Анализ САР положения:
) Ступенчатое задание нагрузки на валу двигателя принимается равным
номинальному значению:
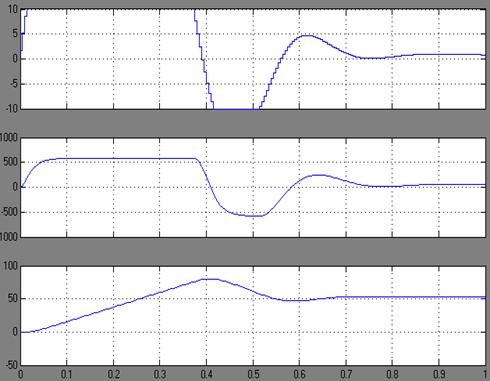
) Пуск в «малом» под нагрузкой:
) Пуск в «большом" под нагрузкой:
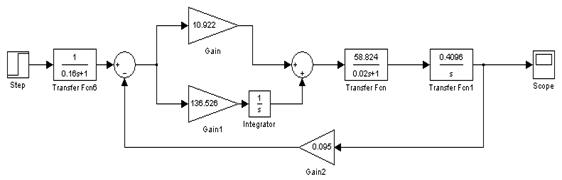
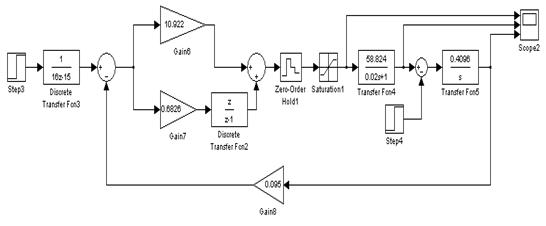
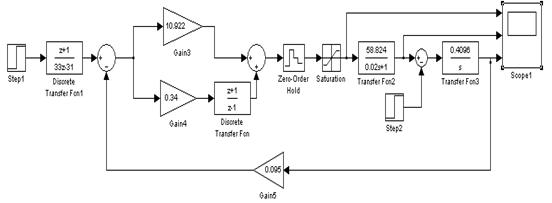
. Синтез и анализ САР скорости СУЭП с регуляторами класса «вход-выход»
Исследуемая система регулирования скорости представлена в следующем виде:
Определение передаточной функции регулятора непрерывной системы
Настроим контур регулирования скорости на СО. Тогда:

Моделирование
непрерывной СУЭП с ПИ регулятором
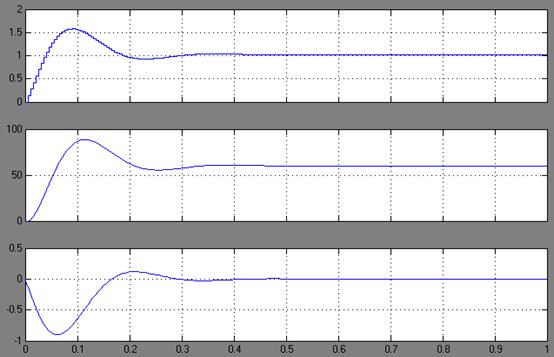
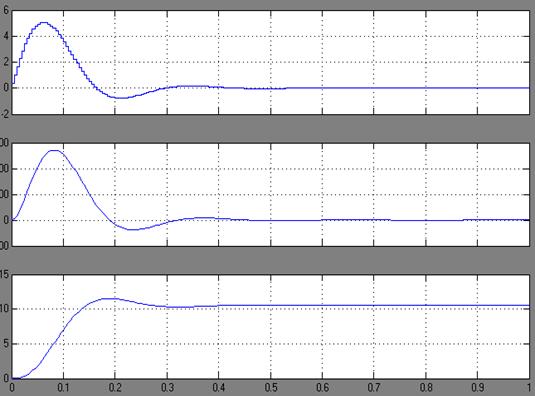
График
переходного процесса в непрерывной СУЭП:
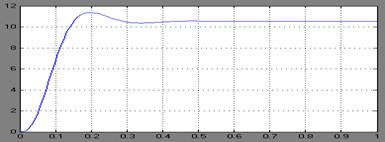
Показатели
качества: tпп = 0.243 c, σ = (11,38-10,52)/10,52=0,0817, т.е. 8,17%.
Нахождение
дискретной передаточной функции ПИ регулятора
1. Синтез методом прямоугольников:
 ; примем
; примем  с.
с.

 .
.
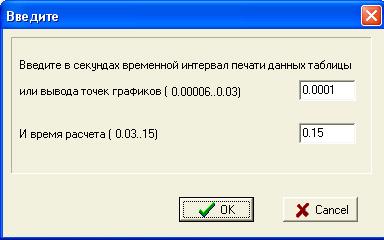
Анализ
эффективности синтезированной СУЭП
Для
анализа систему представляем в виде:
а)
Ступенчатое задание в «малом»: R(0) =10 рад/с; F(0) = 0 А
tпп = 0,237 c ; σ = 9.7%
б)
Ступенчатое возмущение: R(0) = 0 рад/с; F(0) = 60 А
в)
Ступень задания в «малом» + ступень возмущения:
R(0) = 10 рад/с;
F(0) = 60 А
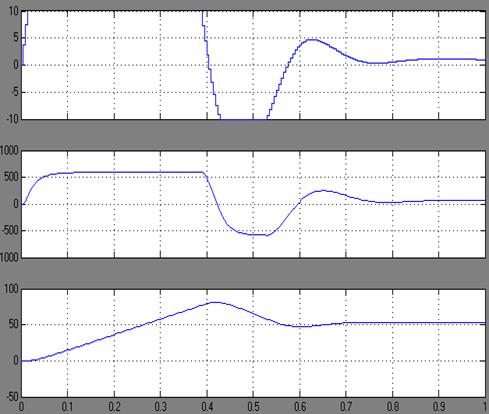
г)
Ступень задания в «большом»: R(0) = 5 рад/с; F(0) = 60 А
2. Синтез методом трапеций:
; примем с.

Анализ
эффективности синтезированной СУЭП
Для
анализа систему представляем в виде:
а)
Ступенчатое задание в «малом»: R(0) =1 рад/c; F(0) = 0 А
tпп = 0.237 c ; σ = 9,5 %
б)
Ступенчатое возмущение: R(0) = 0 рад/c; F(0) = 50 А
в)
Ступень задания в «малом» + ступень возмущения:
R(0) = 1 рад/с; F(0 =
50 А
г)
Ступень задания в «большом»: R(0) = 5 рад/c; F(0) = 50 А
Заключение
1. Синтезированные цифровые СУЭП с регуляторами состояния оптимальны по
быстродействию, т.к. переходные процессы в них как по заданию, так и по
возмущению заканчиваются за n-
интервалов дискретного управления, «в большом» не оптимальны, т.к. на них е
распространяется теорема об n-
интервалах дискретного управления.
2. Синтезированные СУЭП с регуляторами класса «вход-выход» отвечают
стандартной настройке контура скорости на симметричный оптимум с предшествующим
фильтром на входе.
. Показатели качества регулирования контура скорости в цифровых
СУЭП с регулятором класса «вход-выход» методами прямоугольников и трапеций
близки и отвечают показателям качества регулирования непрерывной СУЭП.
Список использованной литературы
1. Гудвин Г.К. Проектирование систем
управления. - М.: БИНОМ. Лаборатория базовых знаний, 2010. - 911 с.
2. Синтез электромеханических приводов с
цифровым управлением / Вейц В.Л., Вербовой П.Ф., Вольберг О.Л., Съянов А.М.,;
Киев: Наук. Думка, 1991. - 232 с.
3. Дорф Р. Современные системы
управления / Р. Дорф, Р. Бишоп. Пер. с англ. Б. И. Копылова. - М.: Лаборатория
Базовых Знаний, 2002. - 832 с.
4. Теория автоматического управления:
Учеб. для вузов / Брюханов В.Н., Косов М.Г., Протопопов С.П. и др. / ред.
Соломенцев Ю.М. - М.: Высш. шк., 2000. - 268 с.