|
А
|
В
|
С
|
В
|
|
1
|
|
|
|
+
|
|
2
|
|
+
|
|
+
|
|
3
|
+
|
+
|
|
+
|
|
-1
|
|
|
+
|
+
|
Таблица 2
4.10 Кинематический
анализ
ωа - (1- к)ωв
= кωс
- основное уравнение кинематики планетарного ряда.
Первая передача.
ω0 - (1- кD)ωx
= кDω1,
ω1=0,273
Вторая передача.
ω0 - (1- кВ)ω1
= кВω2,
ω1=0,402
ω0 - (1- кD)ωX
= кDω1,
ωX=0,565
Третья передача.
ω3 - (1- кA)ω0
= кAω2,
ω2=0,412
ω0 - (1- кВ)ω1
= кВω2,
ω1=0,648
ω0 - (1- кD)ωX
= кDω1,
ωx=1,28
Передача заднего хода.
ω1 - (1- кС)ωX=
кCω-1,
ω1=2,69ωX
ω0 - (1- кD)ωX
= кDω1,
ωX=0,287
ω1=0,77203.
4.11 Силовой анализ
кинематической схемы
Условия: ∑Mi=0, Ma + Mв + Mc = 0, M0 + MХ
+ MР = 0, Mс = -KMа , MX = -M0Ui.
4.12 Мощностной анализ
N = ωM.
Рисунок 8 Кинематическая схема
первой передачи.
Рисунок 9 Кинематическая схема
второй передачи.
Рисунок 10 Кинематическая схема
третьей передачи.
Рисунок 11 Кинематическая схема
передачи заднего хода.
5. РАСЧЕТ ПОЛУОСИ
Цель работы: Необходимо рассчитать критическую
скорость вращения полуоси и допустимые касательные напряжения в ней.
Требования к узлу: При анализе и оценке
конструкции полуоси, как и других механизмов, следует руководствоваться
предъявляемыми к ним требованиями:
· передача крутящего момента от
главной передачи к ведущим колёсам без создания дополнительных нагрузок в
трансмиссии (изгибающих,
скручивающих, вибрационных, осевых);
· возможность передачи крутящего
момента с обеспечением равенства
· угловых скоростей ведущего и
ведомого валов независимо от угла между соединяемыми валами;
· высокий КПД;
· бесшумность;
Кроме того, к полуоси, как и ко всем механизмам
автомобиля, предъявляют такие общие требования: обеспечение минимальных
размеров и массы,
простота устройства и обслуживания,
технологичность, ремонтопригодность.
5.1 Определение
критической скорости вращения
Для определения критической угловой скорости
вращения вала (полуоси) воспользуемся следующей формулой:
где Спо - коэффициент поперечной
жесткости полуоси;по - масса полуоси;
Коэффициент поперечной жесткости
полуоси равен:
где Е - коэффициент упругости, Е =
2.105 МПа;по - длинна вала (полуоси), Lпо = 600 мм = 0,6 м;- приведённый момент
инерции сечения вала (полуоси);
Приведённый момент инерции сечения
вала рассчитывается по формуле:
где
D и d - внешний и внутренний диаметр вала соответственно; D = 35 мм,= 33 мм.


Масса
полуоси рассчитывается по следующей формуле:
где
ρ
- плотность
материала, из которого изготовлен вал (полуось), ρст = 7800
кг/м3;

Соответственно
критическая частота вращения вала
Так
как максимальная частота вращения коленчатого вала двигателя составляет 5600
об/мин, то nmax/nкр = 0,66.
5.2 Определение
напряжения кручения вала (полуоси)
Напряжение кручения трубчатого вала определяется
из следующей зависимости:
где Mк max - максимальный крутящий
момент двигателя, Mк max = 130 Н.с
u´тр max - максимальное
передаточное число высшей ступени КПП, uтр max = uКП I = 3,64;

[τкр] = 300…400 МПа, τкр<[τкр] -
условие прочности на кручение выполняется.
Вывод
В расчете были определены основные
параметры полуоси автомобиля Kia Spectra. Полученные результаты удовлетворяют
всем нормам и допущениям.
6. РАСЧЕТ ДИФФЕРЕНЦИАЛА
Цель работы:
Определить нагрузку на зубья сателлитов,
полуосевых шестерен,
крестовину и нагрузки со стороны сателлитов на
корпус дифференциала.
Прототип:
В качестве прототипа возьмем дифференциал
автомобиля Kia Spectra.
Дифференциал конический, двухсателлитный
.1
Определение нагрузки на зуб сателлита и полуосевых шестерён
Нагрузку на зуб сателлита и полуосевых шестерён
определяют из условия, что окружная сила распределена поровну между всеми
сателлитами, и каждый сателлит передаёт усилие двумя зубьями. Окружная сила,
действующая на один сателлит,
где r1 - радиус приложения силы,=
0,03 м;- число сателлитов, nc = 2;- максимальный момент,
развиваемый двигателем,= 130
Н.м;ТР - передаточное число трансмиссии,
iТР = iКП1* iГП = ;
;
Кд - коэффициент динамичности,
,5 > Кд > 1,5 , в расчете
примем Кд=2.
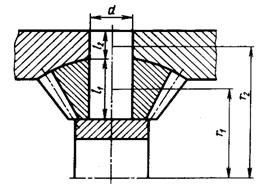
Рисунок 12 Рассчетная схема дифференциала
Шип крестовины под сателлитом
испытывает напряжение среза


Преобразуя формулы, получаем:

где принимаем τср = 120
МПа, и исходя из этого можно найти d:

Шип крестовины под сателлитом
испытывает также напряжение смятия:
где принимаем σсм = 60 МПа,
исходя из этого находим l1;

Шип крестовины под сателлитом
испытывает напряжение смятия в месте крепления в корпусе дифференциала под
действием окружной силы :
где радиус приложения силы  м;
м;

где принимаем σсм = 60 МПа,
и исходя из этого находим l2;
Вывод
В ходе расчета была определена
нагрузка на зубья сателлитов, полуосевых шестерен, крестовину и нагрузки со
стороны сателлитов на корпус дифференциала. Нагрузки, рассчитанные с учетом
всех допущений, удовлетворяют принятым условия.
7. КИНЕМАТИЧЕСКИЙ И СИЛОВОЙ РАСЧЕТ
РУЛЕВОГО УПРАВЛЕНИЯ
Цель работы:
Определить усилие на рулевом колесе и сделать
вывод о
необходимости применения усилителя рулевого
управления.
7.1 Расчет углов
поворота
Рисунок 13 Схема рулевого управления
Максимальный внутренний угол поворота колёс
равен
где R - радиус поворота, R=4,8 м;-
плечо обкатки, rf = -0,04 м;- база а/м, L=2,635 м;
М - межшкворневое расстояние, М=
1,45 м.

Максимальный наружный угол и
максимальный внутренний углы поворота колёс связаны зависимостью:

Откуда и находим 

7.2 Расчёт
передаточного отношения рулевого управления
7.2.1 aрк= 2,5·3600 = 9000 -
угол поворота рулевого колеса
Общее кинематическое передаточное число рулевого
управления:

7.2.2
Усилие на рулевом колесе
 ,
, 
где Rрк = 190 мм - радиус
рулевого колеса;
ηру =0,9 - КПД рулевого
управления.
7.2.3
Суммарный момент сопротивления повороту
МΣ=Мf+Мφ+MH
где Мf=z·Gк·f· rf - момент
сопротивления перекатыванию управляемых колёс при их повороте вокруг шкворней;
Мj=z·Gк·j· rφ - момент
сопротивления деформации шин и трения в контакте с опорной поверхностью
вследствие проскальзывания шин;- число управляемых колёс, z = 2;- коэффициент
сопротивления перекатыванию колёса (f=0,018);
j
- коэффициент сцепления колёс с опорной поверхностью (j=0,8)
rφ - плечо силы трения
скольжения относительно центра отпечатка шины
rφ =0,15· lrf l= 0,006 (м)
= 1600·9,8/4 = 3920 (Н) - вес,
приходящийся на одно колесо;
 - момент, обусловленный поперечным и
продольным наклонами шкворней;
- момент, обусловленный поперечным и
продольным наклонами шкворней;
- число управляемых осей, m = 1;
δ0 - угол наклона шкворня в
поперечной плоскости, δ0
= 10;
γ0 - угол наклона шкворня в
продольной плоскости, γ0
= 10;




) Определение усилия на рулевом
колесе:
Вывод
Полученное значение усилия Pрк не
превышает допустимое [Pрк] на рулевом колесе. Следовательно, установка
усилителя рулевого управления не требуется.
8. РАСЧЕТ ТОРМОЗНОГО МЕХАНИЗМА
Цель:
Определение величин тормозных
моментов на осях автомобиля;
Определение основных параметров
тормозных механизмов.
8.1
Определение тормозных моментов
Тормозной момент на одном борту
определяется из следующего соотношения:

где ja - ускорение замедления
автомобиля, jа = 7 м/с2;а - полная масса автомобиля, mа = 1600 кг;к - радиус
качения колеса, rк = 0,255 м;

Тормозной момент передней оси
автомобиля равен
где а - расстояние от передней
оси до центра тяжести автомобиля,
а = 1,35 м;- колёсная база
автомобиля, L = 2,635 м;- высота центра тяжести автомобиля от опорной
поверхности,= 0,6 м.

Тормозной момент задней оси равен
где b - расстояние от задней оси
до центра тяжести автомобиля,= 1,285 м;

8.2 Определение
сил давления в накладках тормозного механизма задней оси
На задних колёсах установлены
барабанные тормозные механизмы.
Составим три уравнения: передней
колодки, задней колодки и барабана.



Так как имеется три уравнения и
четыре неизвестных R1, R2, P1, P2, то примем допущение, P1 = P2 (это равенство
можно обеспечить конструктивно).
Рисунок 14 Схема барабанного
тормозного механизма
Выражая из уравнений равновесия
передней и задней колодок реакции R1 и R2, получим:
Тогда,

где μ - коэффициент
трения, μ
= 0,3;
a = 98 мм;
с = 92 мм;= 121 мм;Б = 152,4 мм;
Из уравнения  выразим P,
при условии, что P1 = P2 = P.
выразим P,
при условии, что P1 = P2 = P.



8.3
Определение удельного давления на накладках заднего тормозного механизма
Удельное давление на накладках
определяется в соответствии со следующей формулой:
где bн - ширина накладки, bн = 30
мм;
β = 1200 ;

[р] = 2,5 МПа; р<[р] - условие
выполняется.
8.4
Определение тормозных сил в накладках тормозного механизма передней оси
На передние колёса автомобиля
установлены дисковые тормозные механизмы. Для дискового тормозного механизма
тормозной момент рамен:
где rср - средний радиус
накладки, rср = 120 мм;- тормозная сила;
μ - коэффициент трения, μ = 0,3
Рисунок 15 Схема дискового
тормозного механизма
Из уравнения  определяем
P - тормозную силу.
определяем
P - тормозную силу.

8.5
Определение удельного давления на накладках переднего тормозного механизма
Удельное давление на накладках
определяется в соответствии со следующей формулой
 = a . b = 0,14.0,07 = 0,0098 (м2) -
площадь накладки;
= a . b = 0,14.0,07 = 0,0098 (м2) -
площадь накладки;

[р] = 2,5 МПа; р<[р] - условие
выполняется
Вывод
В расчете были определены основные
параметры тормозных механизмов автомобиля Kia Spectra. Результаты, полученные с
учетом всех допущений, удовлетворяют всем нормам. Все необходимые условия
выполняются.
8. РАСЧЕТ ПОДВЕСКИ И УПРУГОГО
ЭЛЕМЕНТА
Цель работы:
Построение упругой характеристики
подвески;
Расчет упругого элемента.
8.1 Расчет
и построение упругой характеристики
Для удовлетворения требования
плавности хода подвеска должна
обеспечивать определённый закон изменения
вертикальной реакции на
колесо в зависимость от прогиба -
эта зависимость называется упру гой
характеристикой подвески.
8.1.1
Найдём статический прогиб подвески

υ - частота собственных колебаний
подрессоренных масс, υ
= 1,2 Гц
8.1. 2
Усилие на упругом элементе при статическом прогибе определим из нагрузки на
одно колесо

где Ga - вес автомобиля;
Учтем, что развесовка автомобиля
примерно 50/50. Следовательно:
8.1.3 Для
нахождения динамической нагрузки и динамического прогиба пружины
воспользуемся следующими
соотношениями:

где Kд =2…2,5 - для легковых
автомобилей (примем Kд=2)

8.1.4
Зададим полный ход подвески, который для легковых автомобилей
равен 180...250 мм (примем fп =210
мм).
Рисунок 16 Упругая характеристика
подвески
8.2
Определение жесткости
Жесткость основной пружины
определяется по формуле:
8.3 Расчет
упругого элемента подвески
Конструкция задней подвески
обеспечивает равенство перемещений пружины и колеса, следовательно жесткость
пружины равна жест кости подвески.
8.3.1
Жесткость пружины определяется по следующему уравнению
где G - модуль сдвига, для стали ( МПа)- число
рабочих витков
МПа)- число
рабочих витков
d - диаметр проволоки (d = 15 мм)- средний
диаметр витка пружины ( D = 150 мм)
8.3.2 Отсюда найдем
число рабочих витков
 ,
,
примем n=7
Число витков n+2=9
8.3.3
Напряжение цилиндрической пружины


Вывод
В ходе работы были рассчитаны
статический и динамический прогибы подвески, построена её упругая
характеристика и определены размеры упругого элемента, каким в данной
конструкции является цилиндрическая пружина.
СПИСОК ЛИТЕРАТУРЫ
1. Вахламов
В. К..Автомобили основы конструкции
. Беляев
В. П. Выполнение курсовых и дипломных проектов по
. специальности
190201 "Автомобиле- и тракторостроение" : учебное пособие для вузов
по специальности "Автомобиле- и тракторостроение / В. П. Беляев ;
Южно-Уральский Государственный Университет, Кафедра «Автомобили»