Разработка и исследование характеристик платформенной инерциальной навигационной системы полуаналитического типа
Введение
Цель настоящей работы разработать алгоритм
платформенной инерциальной навигационной системы, работающей в геоцентрической
системе координат, и определяющей в этой системе следующие параметры:
Координаты
Скорости
Углы ориентации
Так же предусмотрена задача получения
позиционной и скоростной информации в географической системе координат (φ,
λ,  ),
вычисление углов курса, крена и тангажа.
),
вычисление углов курса, крена и тангажа.
Исследование точностных характеристик системы по
уравнениям ошибок и оценка влияния ошибок начальной выставки и гироскопов на
точность ИНС производится при помощи алгоритма разработанного в программной
среде matlab.
В конструкции ИНС используется акселерометры
А-17 и лазерные гироскопы ГЛ-1 производства Раменского приборостроительного
завода.
Исходные данные
Траекторные условия: полет с постоянной
скоростью W=900км/ч, на постоянной высоте H=10000м, курс постоянный
произвольный, время полета 1.5 часа.
Точностные характеристики системы: дрейфы
гироскопов 0.005-0.05 град/час, начальные ошибки координат 15 м, скорости 0.1
м/с(до 5 м/с), ошибка измерений акселерометра 0,05g.
Краткое изложение теоретических
сведений систем координат, в которой работает представленная ИНС
Геоцентрическая система координат
Рис. 1
Геоцентрическими координатами точки O1 являются:
геоцентрический радиус R, угол  между плоскостью
экватора и радиусом R, угол λ между
плоскостью, содержащей ось 0ζ и
точку 01 и плоскостью 0ζξ. Пример
геоцентрической системы координат предсатавлен на рисунке 1.
между плоскостью
экватора и радиусом R, угол λ между
плоскостью, содержащей ось 0ζ и
точку 01 и плоскостью 0ζξ. Пример
геоцентрической системы координат предсатавлен на рисунке 1.
Географическая система координат
Рис. 2
Свяжем с земным эллипсоидом правую ортогональную
систему координат Oξηζ (рисунок
2), при этом начало О совместимо с центром Земли, ось Оζ
напрвим
по малой оси эллипсоида в сторону северного полиса, оси Оξ,
Оη
расположим
в плоскости экватора, причем Оξ - по
линии пересечения гринвичского меридиана с экватором.Возбмем некоторую точку О1
в системе координат Oξηζ
и проведем через нее нормаль к земному эллипсоиду. Положение точки О1 в системе
координат Oξηζ можно
определить углом φ, составляемым
указанной нормалью с плоскостью экватора, углом λ, образуемого
плоскостями меридиана точки О1 и гринвического меридиана, и отрезком отрезком h
от точки пересечения нормали эллипсоида до точки О1. Данные углы φ
и λ
называют
соответственно географической или геодезической широтой и долготой. Величина
отрезка нормали h с большой точностью совпадает с величиной высоты точки О1 над
уровнем океана. Геоцентрическая долгота, очевидно, равна географической.
Алгоритм работы ИНС
Введем систему координат Oxyz с началом в центре
Земли О и с ориентацией одноименных осей по осям платформы (акселерометров).
Выполнение условия, чтобы все время ось Oz платформы совпадала с вектором
положения R, для введенной системы координат Oxyz означает, что
= Rz; x = y = 0,(1)
т.е. ориентация по вектору положения имеет
место, если определяемые координаты х и у равны нулю. Этим и определяется
зависимость ориентации платформы от определяемых координат х, у.
Дифференцируя (1), получим выражение для
скорости:
 (2)
(2)
откуда имеем:
 (3)
(3)
Первые два выражения (3) определяют законы
управления ориентацией платформы (измерительных осей акселерометров), т.е.
значения угловых скоростей поворота платформы  в
функции времени, при идеальной реализации которых выполняется условие (1) и,
таким образом, осуществляется заданная ориентация платформы, т.е. ориентация по
вектору положения R. Что же касается ориентации в азимуте (геоцентрическом
горизонте), то она может выбираться независимо от выполнения условий ориентации
по вектору положения (1).
в
функции времени, при идеальной реализации которых выполняется условие (1) и,
таким образом, осуществляется заданная ориентация платформы, т.е. ориентация по
вектору положения R. Что же касается ориентации в азимуте (геоцентрическом
горизонте), то она может выбираться независимо от выполнения условий ориентации
по вектору положения (1).
Если учесть условие (1) и соответственно этому
считать, что осуществляется идеальная реализация законов управления, т.е. и учесть выражения (3), то получим:
и учесть выражения (3), то получим:
 (4)
(4)
При различных способах ориентации платформы в
азимуте вид уравнений зависит от закона управления этой ориентацией, т.е. от  .
.
Рассмотрим сначала уравнения (4) при ориентации
платформы в азимуте по координатным осям хк, ун сферической системы координат.
Для приведения уравнений (4) к виду, при котором
определяются и две другие сферические координаты Ф и Л, надо знать законы
управления полной ориентацией платформы, т.е. по вектору положения и в азимуте.
Поскольку первые уже известны и соответствуют первым двум выражениям (7.62), то
необходимо установить закон управления ориентацией в азимуте, т.е. ,
реализацию которого должна обеспечить система управления. Затем эти законы
управления ориентацией необходимо связать с производными координат
 (5)
(5)
Получим выражения проекций абсолютной скорости
вращения координатного трехгранника на оси Ox, Оу, Oz через указанные производные
 (6)
(6)
Из второго и третьего равенств (5) определится
соотношение
 (7)
(7)
подставив в которое правую часть первого
равенства (3), получим выражение
 (8)
(8)
определяющее собой закон управления  ориентацией
платформы в азимуте в функции времени. При идеальной реализации закона
ориентацией
платформы в азимуте в функции времени. При идеальной реализации закона  ,
согласно (6), осуществляется заданная ориентация осей платформы по координатным
осям Охк, Oyк.
,
согласно (6), осуществляется заданная ориентация осей платформы по координатным
осям Охк, Oyк.
Если теперь при идеальной реализации законов
управления ориентацией правые части первого и второго равенств (3) подставить
соответственно в (5), то вместе с (6) получим искомые соотношения
 (9)
(9)
Используя (7), представим уравнения
функционирования (4) для рассматриваемой ИНС с управляемой ориентацией
трехгранника измерительных осей для случая ориентации по координатным осям
сферической системы координат, считая поле тяготения сферическим и реализацию
законов управления идеальной:
 (10)
(10)
Представим теперь уравнение (4) для ИНС с
азимутально-свободной ориентацией платформы. В этом случае платформа и
материализуемый ею трехгранник измерительных осей не вращаются вокруг оси Oz по
отношению к инерциальной системе координат. И в данном случае для преобразования
уравнений (4) к виду, при котором определяются также и две другие координаты Ф
и Л, надо знать законы управления полной ориентацией платформы. Закон
управления ориентацией платформы в азимуте в этом случае сводится к ее
стабилизации в азимуте, т.е.
 (11)
(11)
а законы управления по вектору положения
определяются по-прежнему первыми двумя равенствами (3).
При идеальной реализации законов управления
указанной ориентацией соотношения, определяющие эти законы, необходимо связать
с производными сферических координат Ф, Л. Так как законы управления
реализуются вращением платформы вокруг ее осей, а производные Ф и Л есть
составляющие угловой скорости вращения трехгранника координатных осей, то для
установления связи этих скоростей надо спроектировать компоненты линейной
скорости, определяемых системой, на координатные оси. Пусть оси платформы Ох и
Оу составляют с соответствующими координатными осями Охк и Оук угол  (рис.
), тогда получим
(рис.
), тогда получим
 (12)
(12)
Если (7) абсолютная угловая скорость вращения
координатного трехгранника  вокруг оси Оzк, то
угловая скорость вращения платформы вокруг Оzк по отношению к указанному
трехграннику выразится
вокруг оси Оzк, то
угловая скорость вращения платформы вокруг Оzк по отношению к указанному
трехграннику выразится
 (13)
(13)
В свою очередь величина  определится
первым равенством (9), что в новом обозначении запишется
определится
первым равенством (9), что в новом обозначении запишется
 (14)
(14)
На основании равенства (11), второго равенства
(9) и (13), (14) получим
 (15)
(15)
В соответствии с (11), (15) уравнения
функционирования (4) для случая ИНС с азимутально-свободной ориентацией
платформы, считая поле тяготения сферическим, а реализацию законов управления
идеальной, будут иметь вид
 (16)
(16)
Для перехода к относительным значениям Uв и Uc
необходимо ввести параметры от переносного движения (вращения Земли), после
чего получим
 (17)
(17)
Ориентация платформы с установленными на ней
инерциальными элементами (акселерометрами, лазерными гироскопами) ИНС
сферической системы координат, для которой выведены уравнения функционирования,
реализуется при помощи управляемых силовых или индикаторно-силовых
гиростабилизированных платформ, а также при помощи управляемой платформы
вращением по отношению к свободной стабилизированной платформе.
Пересчет координат из
геоцентрической в географическую систему координат
Выразим геоцентрический радиус R точки О1 через
модуль вектора земного эллипсоида R1, отрезок h' продолжения этого вектора до
точки O1 и широту ф1. Используя уравнение эллипса в полярных координатах, т.е.
И выражение квадрата экстцентриситета, получим
Получим связь координат  и
R c
и
R c  и
h. Согласно рисунку 1 выразим координаты
и
h. Согласно рисунку 1 выразим координаты  через
R, ,
через
R, ,
 :
:
 ζ
ζ
Получим равенство
На основании которого, используя (1.6), получим
искомое соотношение
Зависимость R от получится,
если взять равенство

И подставить в него выражения для координат
согласно (1.6):

Образуем на сфере с геоцентрическим радиусом R
сопровождающий трехгранник 01х2y2z2, связанный с точкой 01 подобно тому, как
был введен сопровождающий трехгранник 01х1y1z1 поверхности h = const. Ось O1z2
направим по геоцентрическому вектору, ось O1y2 расположим в плоскости меридиана
точки 01 и направим в сторону северного полюса, ось O1x2 направляется так, что
образуется правый ортогональный трехгранник. Ориентация трехгранника 01х2y2z2
по отношению к системе  определяется
таблицей направляющих косинусов.
определяется
таблицей направляющих косинусов.
Из сравнения трехгранников 01х2y2z2 и 01х1y1z1
видно, что их оси 01х2 и 01х1 совпадают. Данные трехгранники повернуты вокруг
совпадающих осей относительно друг друга на угол ф-ф1, т.е. на величину
разности географической и геоцентрической широты. Взаимное расположение
трехгранников определяется таблицей направляющих косинусов:
y2 z20 0;cos (ф ф1) -sin (ф ф1);(1.20)sin (ф ф1)
cos (ф ф1).
Выражение для разности (ф ф1) определится:

Вследствие малости величин  и
и
 ,
считая также величину h/a малой и раскладывая правые части указанных формул в
ряды по степеням
,
считая также величину h/a малой и раскладывая правые части указанных формул в
ряды по степеням  и h/a, будем иметь
и h/a, будем иметь




Ввиду малости и
 упрощается
матрица направляющих косинусов. Принимая cos ()
= 1, sin
упрощается
матрица направляющих косинусов. Принимая cos ()
= 1, sin  )
=
)
=  получим
получим
y2 z20 0;1 - 
 1
1
При подстановке значения =
0,0067 получаем максимальное отклонение истинной вертикали от геоцентрической,
равное  =
0,00335, что соответствует
=
0,00335, что соответствует  и имеет место на
широте
и имеет место на
широте  .
С увеличением h эта разность убывает, но убывание происходит медленно.
Например, при h = 100 км разность составляет
.
С увеличением h эта разность убывает, но убывание происходит медленно.
Например, при h = 100 км разность составляет  .
По этой причине при небольших значениях h можно считать
.
По этой причине при небольших значениях h можно считать

Анализ ошибок ИНС
Чтобы оценить точностные характеристики системы
воспользуемся точным уравнением, описывающее ошибки ИНС:
 (1)
(1)
где 
После ряда преобразований и упрощений уравнение
ошибок ИНС, в которой используется внешняя информация о высоте полета, примет
вид системы, состоящей из двух векторных уравнений:
 (2)
(2)
Перейдем в уравнениях (2) после преобразования
Коши к векторно-матричной форме:

 +
+ (3)
(3)

Модель погрешностей ИНС можно описать следующим
векторным уравнением:
 (4)
(4)
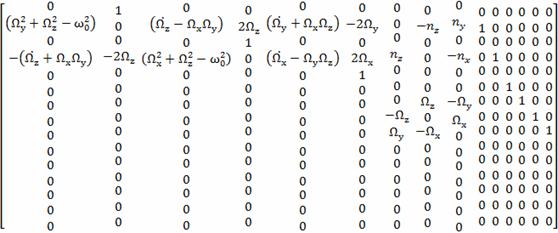
где X - вектор состояния, F - матрица динамики
системы , G - матрица влияния шумов системы, W - вектор белых шумов системы.
Получим вектор состояния X из системы (3):

Матрица динамики системы F, матрица влияния
шумов системы G и вектор белых шумов системы W примут следующий вид:


Для оценки влияния погрешностей проинтегрируем
выражение (4) методом Эллера:

Моделирование произведем в программном продукте
matlab. (Алгоритмы и листинги приведены в приложении)
После проведенных вычислений получены графики
изменения погрешностей координат и скоростей по времени (рис.1-6).
Рис. 3 - График погрешности долготного канала
Рис. 4 - График ошибки определения скорости в
долготном канале
Рис. 5 - График ошибки широтного канала
Рис. 6 - График ошибки определения скорости в
широтном канале
Рис. 7 - График ошибки определения высоты
Рис. 8 - График ошибки определения скорости в
высотном канале
Проанализировав графики можно увидеть, что на
графиках ошибок координаты и скорости долготного канала присутствует
расходимость. Она обусловлена влиянием нестабильного высотного канала через
перекрестные связи. Чтобы избежать данного негативного воздействия отделим
высотный канал, информация о котором будет поступать от внешних источников
(радиовысотомер).
В ходе принятых допущений преобразуем матрицу
динамики системы F обнулением элементов 6 строки, которая примет вид:
навигационный система алгоритм канал
В связи с принятыми изменениями внесем
соответствующие корректировки в алгоритм моделирования (приложение).
В итоге получим графики ошибок координат и
скоростей долготного и широтного каналов без воздействия на них вертикального
канала через перекрестные связи. Сравнив график ошибок долготного канала по
скорости и местоположению с воздействием через перекрестные связи высотного
канала и без воздействия высотного канала, можно увидеть что после изолирования
высотного канала пропала расходимость в долготном канале.
Рис. 9 - График погрешностей координат
долготного канала без воздействия высотного канала
Рис. 10 - График погрешностей определения
скорости в долготном канале без воздействия высотного канала
Рис. 11 - График определения координат широтного
канала без воздействия высотного канала
Рис. 12 - График определения скорости в широтном
канале без воздействия высотного канала
Выводы
После анализа уравнений ошибок и графиков
полученных в ходе моделирования можно увидеть, что при трех взаимосвязанных
каналах автономной ИНС нарастание погрешности со временем достигает величин,
при которых ИНС не будет отрабатывать достаточную точность. Данный процесс
фиксируется в расходимости графиков долготного канала (рис. 1-2). Это
обусловлено влиянием нестабильного вертикального канала через перекрестные связи,
которые можно проследить в матрице динамики системы F.
В итоге, чтобы исключить погрешности привносимые
вертикальным каналом в канал определения координат, высота не определяется в
вычислителе и исключены из общего алгоритма системы управления, используемые
для определения высоты и вертикальной скорости. Поскольку в алгоритме
вычисления координат и скорости необходимо использовать величины  измерение
их осуществляется в радиовысотомере, и сигналы поступают в вычислитель ИНС.
После разрыва перекрестных связей вертикального канала и канала определения
координат результаты моделирования показывают отсутствие расходимости
долготного канала.
измерение
их осуществляется в радиовысотомере, и сигналы поступают в вычислитель ИНС.
После разрыва перекрестных связей вертикального канала и канала определения
координат результаты моделирования показывают отсутствие расходимости
долготного канала.
Используемая литература
1.
Навигационные приборы и системы (И.И. Помыкаев, В.П. Селезнев, Л.А.
Дмитроченко).
.
Лекции Антонова Д.А.
.
Ориентация и навигация подвижных объектов (Б.С. Алешин, К.К. Веремеенко, А.И.
Черноморский).
Приложение
[A,Y,G]=matr15() % функция инициализации матрицы
динамики системы A, вектора состояния Y, матрицы влияния шумов системы
% Входные параметры=0; % угол курса=0; % угол
широты=7.29e-5; % скорость вращения Земли=9.81; % ускорение свободного
падения=1.25e-3; % частота Шулера=0; % проекция абсолютной угловой скорости на
ось Х=u*cos(fi0); % проекция абсолютной угловой скорости на ось Y=u*sin(fi0); %
проекция абсолютной угловой скорости на ось Z=0; % производные =0; % проекций
абсолютных =0; % угловых скоростей на оси X,Y,Z=0; % ускорения измеренные=0; %
акселерометрами=-g0; % по осям X,Y,Z
% Начальные условия=15; % ошибка местоположения
по долготному каналу=0.1; % скоростная ошибка по долготному каналу=15; % ошибка
местоположения по широтному каналу=0.1; % скоростная ошибка по широтному
каналу=15; % ошибка местоположения по высотному каналу=0.1; % скоростная ошибка
по высотному каналу=3.48e-4; % Углы погрешности =3.48e-4; % построения
=3.48e-4; % базового 3-х гранника= 2.42e-8; % Проекции вектора
инструментальных= 2.42e-8; % и методических погрешностей измерителей угловой=
2.42e-8; % скорости на оси X,Y,Z= 0.005; % Погрешности измерения = 0.005; %
ускорения акселерометрами= 0.005; % по осям X,Y,Z
% Матрица динамики системы (для случая влияния через
перекрестные связи вертикального канала)
%A=[ 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0;
% (OMy^2+OMz^2-om0^2) 0 (dtOMz-OMx*OMy) 2*OMz
-(dtOMy+OMx*OMz) -2*OMy 0 -nz ny 1 0 0 0 0 0;
% 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0;
% -(dtOMz+OMx*OMy) -2*OMz (OMx^2+OMz^2-om0^2) 0
(dtOMx-OMy*OMz) 2*OMx nz 0 -nx 0 1 0 0 0 0;
% 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0;
% (dtOMy-OMx*OMz) 2*OMy -(dtOMx+OMy*OMz) 2*OMx
(2*om0^2+OMx^2+OMy^2) 0 -ny nx 0 0 0 1 0 0 0;
% 0 0 0 0 0 0 0 OMz -OMy 0 0 0 1 0 0;
% 0 0 0 0 0 0 -OMz 0 OMx 0 0 0 0 1 0;
% 0 0 0 0 0 0 OMy -OMx 0 0 0 0 0 0 1;
% 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
% 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
% 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
% 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
% 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
% 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;];
% Матрица динамики системы (для случая
отсутствия влияния вертикального канала)=[ 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0;
(OMy^2+OMz^2-om0^2) 0 (dtOMz-OMx*OMy) 2*OMz
-(dtOMy+OMx*OMz) -2*OMy 0 -nz ny 1 0 0 0 0 0;
0 0 1 0 0 0 0 0 0 0 0 0 0 0;
(dtOMz+OMx*OMy) -2*OMz (OMx^2+OMz^2-om0^2) 0
(dtOMx-OMy*OMz) 2*OMx nz 0 -nx 0 1 0 0 0 0;
0 0 0 1 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 1 0 0 0;
0 0 0 0 0 0 OMz -OMy 0 0 0 1 0 0;
0 0 0 0 0 -OMz 0 OMx 0 0 0 0 1 0;
0 0 0 0 0 OMy -OMx 0 0 0 0 0 0 1;
0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0;];
% Матрица динамики системы
%A = [0,1,0,0,0,0,0,0,0,0,0,0,0,0,0;...
%
1.3225*10^-10,0,0,0,0,-2.3*10^-5,0,10,0,1,0,0,0,0,0;...
% 0,0,0,1,0,0,0,0,0,0,0,0,0,0,0;...
% 0,0,-1.56*10^-6,0,0,0,-10,0,0,0,1,0,0,0,0;...
% 0,0,0,0,0,1,0,0,0,0,0,0,0,0,0;...
%
0,2.3*10^-5,0,0,3.125*10^-6,0,0,0,0,0,0,1,0,0,0;...
% 0,0,0,0,0,0,0,0,-1.15*10^-5,0,0,0,1,0,0;...
% 0,0,0,0,0,0,0,0,0,0,0,0,0,1,0;...
% 0,0,0,0,0,0,1.15*10^-5,0,0,0,0,0,0,0,1;...
% 0,0,0,0,0,0,0,0,0,0,0,0,0,0,0;...
% 0,0,0,0,0,0,0,0,0,0,0,0,0,0,0;...
% 0,0,0,0,0,0,0,0,0,0,0,0,0,0,0;...
% 0,0,0,0,0,0,0,0,0,0,0,0,0,0,0;...
% 0,0,0,0,0,0,0,0,0,0,0,0,0,0,0;...
% 0,0,0,0,0,0,0,0,0,0,0,0,0,0,0];
% Вектор состояния
{x1,x2,x3,x4,x5,x6,a,b,g,dnx,dny,dnz,dOMx,dOMy,dOMz}
%Y =
%[15;0.1;15;0.1;15;0.1;0.005;0.005;0.005;0.009;0.009;0.009;0.009;0.009;0.009];
% Вектор
состояния=[x1;x2;x3;x4;x5;x6;a;b;g;dnx;dny;dnz;dOMx;dOMy;dOMz];
% Матрица влияния шумов системы=
[0,0,0,0,0,0;...
,0,0,0,0,0;...
,0,0,0,0,0;...
,1,0,0,0,0;...
,0,0,0,0,0;...
,0,1,0,0,0;...
,0,0,1,0,0;...
,0,0,0,1,0;...
,0,0,0,0,1;...
,0,0,0,0,0;...
,0,0,0,0,0;...
,0,0,0,0,0;...
,0,0,0,0,0;...
,0,0,0,0,0];[tout, yout, Y]=eller(A, G, t0,
tfinal, y0, h) % функция реализации интегрирования методом Эллера =t0; y=y0;=t;
yout=y;(t<tfinal)=y+h*(A*y+G*wgn(6,1,20));=t+h;=[tout;t]; yout=[yout,y];=y;