Проектирование долбежного станка
1. ОПИСАНИЕ РАБОТЫ МАШИНЫ И ИСХОДНЫЕ ДАННЫЕ ДЛЯ
ПРОЕКТИРОВАНИЯ
Долбежный станок предназначен для нарезания цилиндрических зубчатых колес
методом обкатки. Движение от электродвигателя через зубчатый редуктор
передается кривошипу 1 кривошипно-ползунного механизма, который осуществляет
возвратно-поступательное перемещение ползуна 3 с установленным на нем
зубообрабатывающим инструментом-долбяком. Рабочий ход происходит при движении
ползуна сверху вниз.
Кулачковый механизм через систему рычагов обеспечивает подвод и отвод
стола с заготовкой.
Исходные данные: Н - ход ползуна; λ=lOA / lAB; Lmax -
габаритный размер; n1 - частота вращения кривошипа; Fрез-максимальная
сила резания; h - ход толкателя кулачкового механизма;  ,
,  - фазовые углы поворота кулачка.
- фазовые углы поворота кулачка.
Для всех вариантов:
1. 
2.  , где
, где  ;
;  ;
;  .
.
. Моменты инерции звеньев:  ;
;  .
.
Момент инерции ротора, двигателя и всех зубчатых колес, приведенный к
валу двигателя,  .
.
. Частота вращения вала двигателя  .
.
. Коэффициент неравномерности движения  .
.
. Максимально допустимый угол давления в кулачковом механизме  .
.
. Законы движения толкателя: при удалении - №4, при возвращении -
№1 (симметричный).
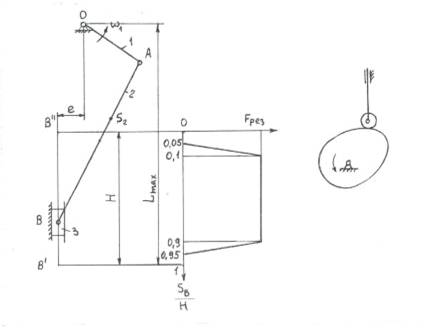
Рисунок 1 - Кривошипно-ползунный и кулачковый механизмы
Таблица 1 - Исходные данные
|
Вар.
|
Н, м
|
λ
|
 , м , м
|
 , об/мин , об/мин
|
 , кН , кН
|
h, м
|
 = = , град , град
|
|
1
|
0.24
|
0.265
|
0.58
|
150
|
9,5
|
0.04
|
70
|
2. ДИНАМИЧЕСКИЙ СИНТЕЗ И АНАЛИЗ МАШИНЫ В УСТАНОВИВШЕМСЯ
РЕЖИМЕ ДВИЖЕНИЯ
.1 Задачи динамического синтеза и анализа машин
Динамический синтез машины по коэффициенту неравномерности движения δ
состоит в определении
такой величины постоянной составляющей приведенного момента инерцииIIп,
при которой колебания скорости звена приведения не выходит за пределы,
устанавливаемые этим коэффициентом. Обычно это достигается установкой
дополнительной вращающейся массы выполняемой в виде маховика.
Динамический анализ машины состоит в определении закона движения звена
приведения ω1(φ1) и ε1(φ1) при полученном значении IIп.
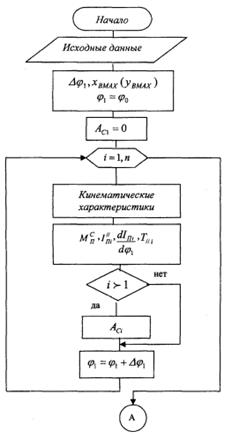
Блок-схема исследования динамической нагруженности машины показана на
рисунке 2.
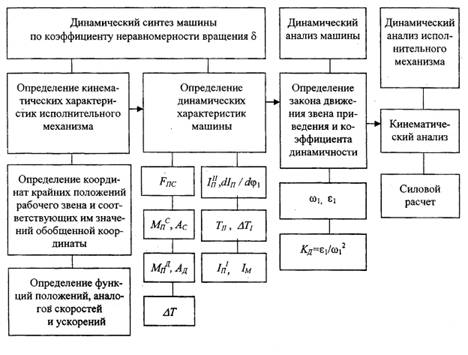
Рисунок 2 - Блок-схема исследования динамической загруженности машины
2.2 Определение размеров, масс и моментов инерции звеньев
рычажного механизма
Входные параметры:
а) H=0.24 м;
б) Lmax=0.58 м;
в) λ=l1/l2=
0.256 м.
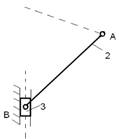
Кривошипно-ползунный механизм изображен на рисунке 3
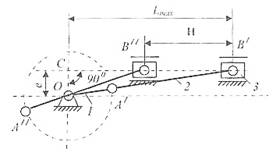
Рисунок 3 - Кривошипно-ползунный механизм
Изображаем схему механизма в крайних положения ∆ОА′В′ и
∆ОА′′В′′. Из ∆OB′C имеем
(l2+l1)2= L2max+e2,(1)
а из ∆OB′′C
(l2-l1)2= (Lmax-H)2+e2(2)
Из выражений (1) и (2) с учетом того, что l2=l1/
λ, находим
 =0.5
=0.5
 =/ λ=0.1189/0.265=0.4644 м;
=/ λ=0.1189/0.265=0.4644 м;
e= =
= .
.
 ;
;
 ;
;
Массы звеньев:
 кг.
кг.
 кг.
кг.
 кг.
кг.
Силы тяжести звеньев:
 Н.
Н.
 Н.
Н.
 Н.
Н.
Моменты инерции звеньев:
 = 0.1 кг
= 0.1 кг .
.
 кг.
кг.
Приведённый момент инерции вращающихся звеньев (без маховика):
 кг
кг
Средняя угловая скорость кривошипа 1
 рад/с
рад/с
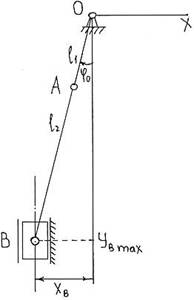
Рисунок 4 - Обобщенные координаты механизма в крайнем наиболее удаленном положении
Обобщенная координата механизма φ0 в крайнем, наиболее удалённом
положении ползуна 3 (рисунок 4) равна:

.3 Структурный анализ рычажного механизма
Схема механизма:

Рисунок 5 - Схема механизма
Число подвижных звеньев n=3
Число низших кинематических пар pн=4, в том числе:
вращательные - O(1, 0), A(1, 2), B(2, 3);
поступательные - B(3, 0).
Число степеней свободы механизма:=3∙n-2∙pн─
pB=3∙3─ 2∙4─ 0=1
Начальное звено - кривошип 1.
Механизм 1-го класса Структурная группа 2-го класса
Рисунок 6 - Строение механизма
Формула образования механизма:(1,0)→II(2,3), механизм 2-го класса
2.4 Определение кинематических характеристик рычажного
механизма
.4.1 Построение планов положений
Выбираем
масштабный коэффициент  =0,002 м/мм. Тогда чертежные отрезки
=0,002 м/мм. Тогда чертежные отрезки
ОА= =59,5 мм.=
=59,5 мм.= =223 мм.2=
=223 мм.2= =81 мм.=
=81 мм.=  =
=  =30 мм.
=30 мм.
На
расстоянии эксцентриситета проводим ось движения ползуна(если е ). На оси ползуна делаем засечку длинной (ОА+АВ)
получаем крайнее положение ползуна. Проводим прямую линию. Проводим окружность
радиусом ОА. Отмечаем точку А1, соответствующую крайнему положению
механизма.
). На оси ползуна делаем засечку длинной (ОА+АВ)
получаем крайнее положение ползуна. Проводим прямую линию. Проводим окружность
радиусом ОА. Отмечаем точку А1, соответствующую крайнему положению
механизма.
В
направлении вращения по окружности радиусом ОА с шагом 300 отмечаем
точки Аi. Из каждой точки Аi на оси ползуна делаем засечки
длинной АВ. Получаем 12 положений ползуна. Контрольное положение 11 оформляем
виде кинематической пары.
Противоположное
крайнее положение механизма: для этого из точки О делаем засечку (АВ-ОА).
Получаем 7´. На отрезке АiВi делаем засечки
величиной АSi, получаем положение центра масс. Соединяем эти точки и
получаем траекторию движения центра масс.
.4.2
Аналитический метод
Расчетная
схема изображена на рисунке 7

Рисунок
7 Расчетная схема
В
результате получаем алгоритм определения кинематических характеристик, согласно
которому выполняем расчет для положения n=11 (рисунок 8).

Рисунок
8 Одиннадцатое положение кривошипа
Обобщенная
координата:

где
 - шаг изменения обобщенной координаты:
- шаг изменения обобщенной координаты:
знак
«+» соответствует вращению кривошипа против часовой стрелки;
знак
«-» - вращению по часовой стрелке.


1. 
2. 
3. 
4. 
5. 
6. 
7. 
8. 
9. 
10. 
11. 
12. 
13. 
14. 
15. 
16. 
17. 
Примечания: 1. В формуле (3)  , если ползун расположен сверху от
начала координат, или
, если ползун расположен сверху от
начала координат, или  , если снизу;
, если снизу;
.  со знаком «+» или «-» в системе
координат XOY.
со знаком «+» или «-» в системе
координат XOY.
.4.3 Графический метод
Аналог скорости т. А:
 (м).
(м).
Масштабный коэффициент:  =0,002 м/мм.
=0,002 м/мм.
Отрезок, изображающий  : [ра]=
: [ра]= =59,5 мм.
=59,5 мм.
Проведем расчет для контрольного положения 11:
Для построения плана аналогов скоростей используем векторные уравнения:
 ,
,
где  перпендикулярно OA в направлении
перпендикулярно OA в направлении  ,
,  перпендикулярно АВ
перпендикулярно АВ
 , где
, где  =0 и
=0 и 
По теореме подобия определим положение т. S2:


Из плана находим передаточные функции (аналоги скоростей):
 .
.
 .
.

 .
.
Сопоставление результатов:
|
Параметр
|
Единицы измерения
|
Аналитический метод
|
Графический метод
|
|

|
м
|

|
0.114
|
|

|
-
|

|
0.1098
|
|

|
м
|

|
0.048
|
|

|
м
|

|
0.104
|
2.5 Определение сил полезного сопротивления
Заданную
механическую характеристику технологического процесса F3(SB)
привязываем к крайним положениям ползуна и находим силу полезного сопротивления действующую на ползун 3:
действующую на ползун 3:
3=µF( ),
),
где
 -
ордината графика в мм;
-
ордината графика в мм;
μF -
масштабный коэффициент сил:
Результаты
определения F3 приведены в таблице
|
№ положения
|
yF, мм
|
FЗ, Н
|
|
1
|
0
|
0
|
|
2
|
0
|
0
|
|
3
|
0
|
0
|
|
4
|
0
|
0
|
|
5
|
0
|
0
|
|
6
|
0
|
0
|
|
7
|
0
|
0
|
|
8
|
22
|
2900
|
|
9
|
90
|
9500
|
|
10
|
90
|
9500
|
|
11
|
90
|
9500
|
|
12
|
64
|
8500
|
|
13
|
0
|
0
|
2.6 Динамическая модель машины
В движении входного звена исполнительного рычажного механизма имеют место
колебания угловой скорости, основными причинами которых являются:
) несовпадение законов изменения сил сопротивления и движущих сил в
каждый момент времени;
) непостоянство приведенного момента инерции звеньев исполнительного и
некоторых вспомогательных механизмов.
Чтобы учесть влияние названных причин на закон движения входного звена
исполнительного механизма, составляется упрощенная динамическая модель,
устанавливающая функциональную взаимосвязь исследуемых параметров.
Наиболее простой динамической моделью машинного агрегата может быть
одномассовая модель, представленная на рисунке 9.
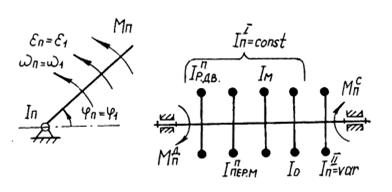
Рисунок 9 - Динамическая модель машинного агрегата
В качестве такой модели рассматривается условное вращающееся звено -
звено приведения, которое имеет момент инерции IП относительно оси
вращения (приведенный момент инерции) и находится под действием момента сил МП
(приведенного момента сил). В свою очередь,
П
=  ,
,
где  - приведенный момент движущих сил;
- приведенный момент движущих сил;  - приведенный момент сил
сопротивления. Кроме того,
- приведенный момент сил
сопротивления. Кроме того,
 ,
,
где
 - постоянная составляющая приведенного момента
инерции;
- постоянная составляющая приведенного момента
инерции;  - переменная составляющая приведенного момента
инерции. В величину входят собственный момент инерции кривошипа I0,
приведенные моменты инерции ротора электродвигателя и передаточного механизма (
- переменная составляющая приведенного момента
инерции. В величину входят собственный момент инерции кривошипа I0,
приведенные моменты инерции ротора электродвигателя и передаточного механизма ( ), а также момент инерции IМ добавочной
массы (маховика), причем необходимость установки маховика определяется на
основании заданной степени неравномерности движения звена приведения.
), а также момент инерции IМ добавочной
массы (маховика), причем необходимость установки маховика определяется на
основании заданной степени неравномерности движения звена приведения.
Динамические
характеристики МП и IП должны быть такими, чтобы закон
вращения звена приведения был таким же, как и у главного вала машины (кривошипа
1 основного исполнительного рычажного механизма), т.е. φП = φ1, wП= w1, εП= ε1.
2.7 Определение приведенных моментов сил
Приведенный момент сил сопротивления определяется из равенства мощностей,
согласно которому мощность момента равна сумме мощностей от силы
полезного сопротивления F3 и сил тяжести звеньев:
|w1| =  ,
,
откуда
=  sign(w1),
sign(w1),
где sign(w1)=-1, если
механизм вращается по часовой стрелке,(w1)=
1, если механизм вращается против часовой стрелки.
Для положения 11 равно:
= (8500*(-0.1043) - 324.986 *(-0.1012)-974.957*(-0.1043) =
-804.123 Нм.
Приведенный момент движущихся сил принимается постоянным и
определяется из условия, что за цикл установившегося движения машины имеет
место равенство работ движущих сил и сил сопротивления:
 =
=  .
.
Работа сил сопротивления  :
:
 .
.
Интегрирование выполняется численным методом по способу трапеций:
 .
.
где  -шаг интегрирования.
-шаг интегрирования.
 рад.
рад.
Т.к. за цикл работа движущих сил
 ,
,
 .
.
2.8 Определение переменной составляющей приведенного момента
инерции и его производной
Переменная составляющая приведенного момента инерции определяется из равенства
кинетических энергий, согласно которому кинетическая энергия звена приведения с
моментом инерции равна сумме кинетических энергий звеньев 2 и 3:
 =
=  ,
,
 .
.

 кг*м2.
кг*м2.

2.9 Определение постоянной составляющей приведенного момента
инерции и момента инерции маховика
В основу расчета положен метод Н. И. Мерцалова. Для определения изменения
кинетической энергии машины  предварительно определяем работу движущихся сил АД.
Для i-го положения
предварительно определяем работу движущихся сил АД.
Для i-го положения
 ,
,
 .
.
 .
.
Изменение кинетической энергии  звеньев с постоянным приведенным
моментом инерции равно
звеньев с постоянным приведенным
моментом инерции равно
 ,
,
где  кинетическая энергия звеньев, создающих переменную
составляющую . По методу Н.И. Мерцалова
кинетическая энергия звеньев, создающих переменную
составляющую . По методу Н.И. Мерцалова определяется приближенно по средней
угловой скорости w1ср:
определяется приближенно по средней
угловой скорости w1ср:
 .
.
Далее из полученного за цикл массива значений (рисунок 10) находим максимальную  и минимальную
и минимальную  величины, используя которые,
вычисляем максимальный перепад кинетической энергии:
величины, используя которые,
вычисляем максимальный перепад кинетической энергии:
 .
.
Рисунок 10
Тогда необходимая величина , при которой имеет место вращение
звена приведения с заданным коэффициентом неравномерности δ,
равна:

Где
w1ср = ,
,
Момент инерции маховика определяется по формуле
 ,
,
где  - приведенный момент инерции всех вращающихся масс машины
(ротора двигателя, зубчатых колес, кривошипа).
- приведенный момент инерции всех вращающихся масс машины
(ротора двигателя, зубчатых колес, кривошипа).
2.10 Определение закона движения звена приведения
С помощью зависимости  , используемой при определении постоянной составляющей
приведенного момента инерции по методу Мерцалова, можно получить зависимость угловой
скорости звена приведения w1(φ1).
, используемой при определении постоянной составляющей
приведенного момента инерции по методу Мерцалова, можно получить зависимость угловой
скорости звена приведения w1(φ1).
Из рисунка 10 видно, что для любого положения кинетическая энергия
звеньев, обладающих постоянным моментом инерции , равна:
 ,
,
 .
.
Так как  , то текущее значение угловой скорости
, то текущее значение угловой скорости
 .
.
Угловое ускорение ε1 определяется из дифференциального уравнения движения
звена приведения:
 .
.
.11 Схема алгоритма программы динамического синтеза и анализа
машины
Рассмотренные материалы позволяют разработать программу исследования
динамической нагруженности машинного агрегата. В качестве объекта исследования
взята технологическая машина, в которой основным исполнительным механизмом
является кривошипно-ползунный механизм (например, пресс-автомат). Примерная
схема алгоритма такой программы приведена на рис.
Осуществляется
ввод исходных данных (блок 1). Следует обратить внимание на соответствие
направления вращения кривошипа  , знака FПС
по отношению к положительному направлению соответствующей оси координат, а
также на знак величины эксцентриситета е.
, знака FПС
по отношению к положительному направлению соответствующей оси координат, а
также на знак величины эксцентриситета е.
В
блоке 2 вычисляются угловой шаг  ,
максимальная координата ползуна xBmax(или уBmax ) и
присваивается начальное значение обобщенной координате
,
максимальная координата ползуна xBmax(или уBmax ) и
присваивается начальное значение обобщенной координате  .
.
Далее
в цикле по  (блоки 4-9) вычисляются кинематические характеристики
рычажного механизма, динамические характеристики
(блоки 4-9) вычисляются кинематические характеристики
рычажного механизма, динамические характеристики  ,
, ,
,  кинетическая
энергия ТII, работа сил сопротивления Ас .
кинетическая
энергия ТII, работа сил сопротивления Ас .
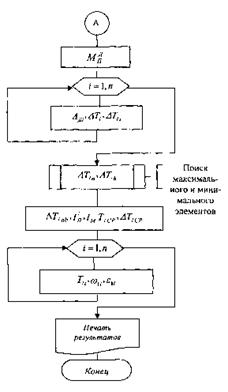
По
окончании цикла определяется приведенный момент движущих сил  (блок 10).
(блок 10).
В
новом цикле (блоки 11-12) производится вычисление АД,  ,
,  .
.
В
подпрограмме (блок 13) из массива находятся
экстремальные значения  и
и  , что
позволяет в блоке 14 определить величины
, что
позволяет в блоке 14 определить величины , IМ
а также Т1ср и
, IМ
а также Т1ср и  .
.
После
вычисления в цикле (блоки 15,16)  производится
печать результатов расчета (блок 17).
производится
печать результатов расчета (блок 17).
Рисунок
11
2.12 Исходные данные для выполнения расчетов на ПЭВМ
|
№ пп
|
Параметр
|
Условное обозначение
|
Единица измерений
|
Величина
|
|
1
|
Схема механизма
|
Рисунок
|
-
|

|
|
2
|
Размеры звеньев
|
   
|
м м м м
|
0. 0.4644 0.0416 -0. 0.4644 0.0416 -0.
|
|
3
|
Начальная обобщенная координата
|

|
град
|
264,096
|
|
4
|
Направление вращения кривошипа
|
-
|
-
|
Против часовой стрелке
|
|
5
|
Масса шатуна
|

|
кг
|
37,1483
|
|
6
|
Масса ползуна
|

|
кг
|
111,445
|
|
7
|
Момент инерции шатуна
|

|
кг∙м²
|
1,3617
|
|
8
|
Сила полезного сопротивления
|
|
|
|
|

|
Н
|
0
|
|
|

|
Н
|
0
|
|
|

|
Н
|
0
|
|
|

|
Н
|
0
|
|
|

|
Н
|
0
|
Н
|
0
|
|
|

|
Н
|
0
|
|
|

|
Н
|
2900
|
|
|

|
Н
|
9500
|
|
|

|
Н
|
9500
|
|
|

|
Н
|
9500
|
|
|

|
Н
|
8500
|
|
|

|
Н
|
0
|
|
9
|
Средняя угловая скорость кривошипа
|

|
рад/с
|
15,7
|
|
10
|
Коэффициент неравномерности вращения кривошипа
|
δ
|
-
|
0.05
|
|
11
|
Приведенный момент инерции всех вращающихся звеньев
|

|
кг∙м²
|

|
2.13 Определение постоянной составляющей приведенного момента
инерции и закон движения звена приведения по методу Мерцалова Н.И.
По результатам расчетов на ЭВМ строим графики кинематической и
динамической характеристики машины в зависимости от обобщенной координаты j1.
Для всех графиков принимаем масштаб по оси j
 =0.0349 рад/мм.
=0.0349 рад/мм.
Вместо значений j
отмечаем номера положений механизма. Отрезок, отображающий цикл: [1-13] = 
График кинематических характеристик

 ,
,
 - аналог угловой скорости вращения ползуна.
- аналог угловой скорости вращения ползуна.
Выбираем  ,
, ,
, 
Тогда масштабный коэффициент равен:


Ординаты графиков рассчитываем по формулам

Результаты вычислений ординат приведены в таблице 5
Таблица 5
|
Nпол
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
11
|
12
|
13
|
|
 ,мм ,мм
|
0
|
8
|
30
|
56
|
80
|
95
|
100
|
95
|
80
|
56
|
30
|
8
|
0
|
|
 мм мм
|
-50
|
-44
|
-26
|
0
|
26
|
44
|
50
|
44
|
26
|
0
|
-26
|
-44
|
-50
|
|
 ,мм ,мм
|
0
|
-6
|
-9
|
-10
|
-7
|
-4
|
0
|
4
|
7
|
10
|
9
|
6
|
0
|
График переменной составляющей приведенного момента инерции  и входящих в неё величин.
и входящих в неё величин.
Принимаем

 = A + B + C , где
= A + B + C , где
= m2 ( 2+
2+ 2) - доля от кинетической энергии движения
центра масс шатуна.= IS2
2) - доля от кинетической энергии движения
центра масс шатуна.= IS2 - доля
- доля
С = m3  - доля движения поршня
- доля движения поршня
Ординаты графиков определяем по формулам

Результаты вычислений ординат приведены в таблице 6.
Таблица 6
|
Nпол
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
11
|
12
|
13
|
|
 , мм , мм
|
8
|
11
|
16
|
17
|
14
|
10
|
8
|
10
|
14
|
17
|
16
|
11
|
8
|
|
 , мм , мм
|
3
|
2
|
1
|
0
|
1
|
2
|
3
|
2
|
1
|
0
|
1
|
2
|
3
|
|
 , мм , мм
|
0
|
11
|
30
|
31
|
18
|
5
|
0
|
5
|
18
|
31
|
30
|
11
|
0
|
|
 , мм , мм
|
11
|
25
|
47
|
49
|
33
|
16
|
11
|
16
|
33
|
49
|
47
|
25
|
11
|
График приведенных моментов сил сопротивления и движущих сил
Принимаем
Ординаты графиков определяем по формулам

Результаты вычислений ординат приведены в таблице 7.
График работ сил сопротивления и движущих сил
Принимаем
Ординаты графиков определяем по формулам
Результаты вычислений ординат приведены в таблице 7
График изменения кинетической энергии машинного агрегата DT(j1) и изменения кинетической энергии
постоянной составляющей приведенного момента инерции DTI(j1).
DT=f(j1), DTI=f(j1)
Принимаем
Ординаты графиков определяем по формулам
Результаты вычислений ординат приведены в таблице 7
Таблица 7
|
Nпол
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
11
|
12
|
13
|
|
 , мм , мм
|
0
|
0
|
-1
|
-1
|
-1
|
0
|
1
|
1
|
1
|
-80
|
-54
|
-14
|
0
|
|
 , мм , мм
|
12
|
12
|
12
|
12
|
12
|
12
|
12
|
12
|
12
|
12
|
12
|
12
|
12
|
|
 , мм , мм
|
0
|
0
|
-1
|
-1
|
-1
|
-1
|
-2
|
-1
|
-1
|
-21
|
-56
|
-74
|
-76
|
|
 , мм , мм
|
0
|
7
|
12
|
19
|
25
|
32
|
38
|
44
|
50
|
57
|
63
|
70
|
76
|
|

|
0
|
12
|
24
|
36
|
48
|
60
|
72
|
85
|
98
|
73
|
14
|
-8
|
0
|
|

|
0
|
12
|
24
|
36
|
48
|
60
|
72
|
85
|
98
|
73
|
14
|
-8
|
0
|
График угловой скорости начального звена w1(j1)
Принимаем

Ординаты графика определяем по формуле

Результаты вычислений ординат приведены в таблице 8
График углового ускорения начального звена e1(j1)
Принимаем

Ординаты графика определяем по формуле

Результаты вычислений ординат приведены в таблице 8
Таблица 8
|
Nпол
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
11
|
12
|
13
|
|
 ,мм ,мм
|
-55
|
-56
|
-56
|
-56
|
-56
|
-57
|
-57
|
-57
|
-58
|
-57
|
-56
|
-55
|
|
 мм мм
|
-10
|
-9
|
-9
|
-9
|
-9
|
-9
|
-9
|
-10
|
-10
|
53
|
33
|
1
|
-10
|
Выводы: в результате исследования динамики машинного агрегата
установлено, что для обеспечения заданной величины коэффициента неравномерности
вращения
δ =  = 0.04.
= 0.04.
Постоянная составляющая приведенного момента инерции  .
.
Конструктивно это обеспечивается установкой на вал кривошипа с моментом
инерции  =842,616 кг м2.
=842,616 кг м2.
долбежный станок рычажный инерция
3. ДИНАМИЧЕСКИЙ АНАЛИЗ РЫЧАЖНЫХ МЕХАНИЗМОВ
.1 Задачи динамического анализа рычажных механизмов
Конченой целью динамического анализа рычажного механизма является
определение реакции в кинематических парах и уравновешивающего (движущего)
момента, действующего на кривошипный вал со стороны привода. Указанные задачи
решаются методом кинетостатики, основанным на принципе Даламбера. Этот метод
предполагает введение в расчет инерционных нагрузок (главных векторов и главных
моментов сил инерции), для определения которых требуется знать ускорения
центров масс и угловые ускорения звеньев. Поэтому силовому расчету предшествует
кинематический анализ механизма по известному уже закону вращения кривошипа  .
.
3.2 Кинематический анализ
Кинематический анализ рычажного механизма производится после того, как в
результате динамического анализа машинного агрегата установлен закон движения
звена приведения  . Учитывая, что закон движения кривошипа рычажного механизма
такой же, как и звена приведения, при кинематическом анализе требуется
определить соответствующие этому закону движения линейные скорости и ускорения
отдельных точек, а также угловые скорости и ускорения звеньев механизма.
. Учитывая, что закон движения кривошипа рычажного механизма
такой же, как и звена приведения, при кинематическом анализе требуется
определить соответствующие этому закону движения линейные скорости и ускорения
отдельных точек, а также угловые скорости и ускорения звеньев механизма.
Проводим контрольный расчет для положения механизма №12, для которого 
3.2.1 Аналитический метод расчёта
Известно, что угловая скорость к-го звена равна
 ,
,
т.е угловая скорость к-го звена равна произведению аналога угловой
скорости этого звена на угловую скорость звена приведения 1.
Аналогичные выражения можно получить для проекций скорости какой-либо
точки звена (например, точки М):

Угловое ускорение к-го звена

Так как
 ,
,
То
Аналогично рассуждая, получим проекции ускорения точки М:

Алгоритм определения скоростей и ускорений для кривошипно-ползунных
механизмов имеет вид:
1. 
2. 
3. 
4. 
5. 
6. 
7. 
8. 
9. 
10. 
3.2.2 Графический метод расчета
Расчет выполняется для положения 12 в котором :
,  .
.


Принимаем масштабный коэффициент  , тогда отрезок изображающий
, тогда отрезок изображающий  равен
равен
Скорость в точке В находим путем построения плана скоростей согласно
уравнению
 ,
,
где  - скорость точки В относительно А
- скорость точки В относительно А
 ,
,
где - скорость точки В относительно С
- скорость точки В относительно С
 в
сторону
в
сторону  ;
;  =0 (т. ВО
неподвижна), следовательно
=0 (т. ВО
неподвижна), следовательно  .
.
По
теореме подобия определим положение т. S2

Из
плана скоростей находим



Ускорение точки a.
 ,
,
где  от А к О ,а
от А к О ,а  в сторону
в сторону 


Принимаем масштабный коэффициент  . Находим отрезки изображающие
. Находим отрезки изображающие  и
и  .
.
Ускорение точки B находим путем построения плана ускорений по формуле
 ,
,
где  от В к А;
от В к А;  ;
; 

Точку S2 находим из свойства подобия

Из плана ускорений находим



3.2.3 Сопоставление результатов графического и аналитического
методов расчета
|

|

|

|

|

|

|
|
Графический
|
0,168
|
0,216
|
1,2
|
1,52
|
1,48
|
3,7
|
|
Аналитический
|
0,166
|
0,219
|
1,207
|

|

|

|
3.3 Силовой расчет
3.3.1 Аналитический метод расчета
При силовом расчете механизма рассматриваются статически определимые
кинематические цепи (группы Ассура), причем расчет начинается с группы,
наиболее удаленной от начального звена.
Расчетная схема группы Ассура 2-го вида показана на рисунке 13
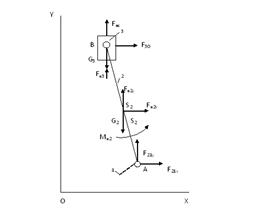
Рисунок 13
Реакции в кинематических парах группы (2,3) с вертикальным расположением
ползуна (схема 3) вычисляются в следующей очередности:
. Из условия, что  определяется
определяется 

. Реакция  определяется из уравнения равновесия моментов сил для звена
2 относительно точки В:
определяется из уравнения равновесия моментов сил для звена
2 относительно точки В:

. Реакция  определяется из условия равновесия проекций сил, действующих
на группу (2,3), на ось Х:
определяется из условия равновесия проекций сил, действующих
на группу (2,3), на ось Х:
Для определения проекций реакции  во внутренней кинематической паре В
рассмотрим равновесие звена 2 по действием приложенных сил:
во внутренней кинематической паре В
рассмотрим равновесие звена 2 по действием приложенных сил:

Откуда, проектируя на оси координат, получим

Модули реакций  и
и  определяем по формулам
определяем по формулам
Далее рассматривается кривошип 1 (рис. 14).
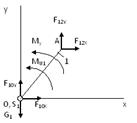
Рисунок 14
В точке А приложена известная реакция  проекции которой равны:
проекции которой равны:
В точке О расположена сила тяжести  и неизвестная реакция
и неизвестная реакция  . Кроме того, к звену приложен
неизвестный главный момент сил инерции
. Кроме того, к звену приложен
неизвестный главный момент сил инерции
Для того, чтобы звено 1 двигалось по заданному закону, к нему приложен
уравновешивающий момент сил  , который является реактивным моментом со стороны
отсоединенной части машины. Его величина определяется из уравнения моментов сил
относительно точки О:
, который является реактивным моментом со стороны
отсоединенной части машины. Его величина определяется из уравнения моментов сил
относительно точки О:

Реакция в проекциях имеет вид
Модуль
На основании вышеизложенного можно представить алгоритм силового расчета
кривошипно-ползунных механизмов:
1.  Н.
Н.
2.  Н.
Н.
3.  Н.
Н.
4. 
5. 
6. 
7. 
8. 
9. 
10. 
11. 
12. 
13. 
14. 
15. 
16. 
17. 
18. 
19. 
20. 
21. 
3.3.2 Графический метод расчета
Механизм вычерчен в масштабе  К ползуну 3 приложена сила полезного
сопротивления
К ползуну 3 приложена сила полезного
сопротивления  а к кривошипу 1 в связи с тем, что механизм отсоединён от
машинного агрегата (двигателя), в состав которого он входил, прикладывается
уравновешивающий момент
а к кривошипу 1 в связи с тем, что механизм отсоединён от
машинного агрегата (двигателя), в состав которого он входил, прикладывается
уравновешивающий момент  величина которого неизвестна.
величина которого неизвестна.
Требуется определить реакции во всех кинематических парах:  и уравновешивающий момент
и уравновешивающий момент 
Формула строения механизма имеет вид:
(0;1)→II(2;3)
Определяем силы тяжести звеньев, главные векторы и главные моменты сил
инерции:
Звено 1:

 т.к. кривошип уравновешен и центр масс находится в стойке
т.к. кривошип уравновешен и центр масс находится в стойке

Звено 2:
 Н.
Н.


Звено 3:
 Н.
Н.
 Н
Н

. Отсоединяем от механизма группу Ассура (2;3). Прикладываем к звеньям
все внешние активные силы ( , силы инерции (
, силы инерции ( ), а действие отброшенных звеньев 1 и
0 заменяем реакциями
), а действие отброшенных звеньев 1 и
0 заменяем реакциями  . Силы инерции направляются противоположно ускорению центра
масс, а моменты сил инерции противоположно угловым ускорениям звеньев.
. Силы инерции направляются противоположно ускорению центра
масс, а моменты сил инерции противоположно угловым ускорениям звеньев.
При этом неизвестную по величине и направлению реакцию  представим как сумму:
представим как сумму:
Реакция  известна по направлению -
известна по направлению - направляющим, но не известна по
величине и точке приложения. Требуется определить плечо её приложения
направляющим, но не известна по
величине и точке приложения. Требуется определить плечо её приложения  .
.
. Определим составляющую  из равновесия моментов сил относительно точки В для звена 2.
из равновесия моментов сил относительно точки В для звена 2.
 для звена 2
для звена 2

 плечи сил, которыеопределяются по чертежу линейкой
плечи сил, которыеопределяются по чертежу линейкой
 чтобы соотнести размерность.
чтобы соотнести размерность.

 Если в результате расчета получилось со знаком
Если в результате расчета получилось со знаком  , то при построении откладывается в сторону,
противоположно направлению, указанному на схеме.
, то при построении откладывается в сторону,
противоположно направлению, указанному на схеме.
. Составляющие  определяются из векторного условия равновесия сил,
действующих на группу (2;3), составленного в соответствии с принципом
Даламбера:
определяются из векторного условия равновесия сил,
действующих на группу (2;3), составленного в соответствии с принципом
Даламбера:
 (1)
(1)
Для этого строим план сил группы Ассура. Принимаем масштабный коэффициент
 .
.
Находим отрезки, изображающие известные силы

Точку 8 получаем пересечением .
Из плана сил находим


. Внутреннюю реакцию  в кинематической паре найдём из условия равновесия сил
действующих на звено 2:
в кинематической паре найдём из условия равновесия сил
действующих на звено 2:


Расчет группы закончен.
. Производим силовой расчет механизма 1 класса. Для этого вычерчиваем его
в масштабе  , прикладываем внешние силы:
, прикладываем внешние силы:  , момент инерции
, момент инерции  , известную уже реакцию
, известную уже реакцию  ; неизвестный уравновешивающий момент
; неизвестный уравновешивающий момент
 и неизвестную по направлению и
величине реакцию
и неизвестную по направлению и
величине реакцию  .
.
. Для определения  строим план сил в масштабе
строим план сил в масштабе  .
.
. Реакцию определим из уравнения равновесия сил, действующих на звено
1.
Откуда

. Определим из уравнения равновесия моментов сил относительно точки О:


.3.3 Сопоставление результатов графического и аналитического
методов расчета
|

|

|

|

|

|
|
Графический
|
9100
|
1080
|
9300
|
8750
|
217,966
|
|
Аналитический
|
9134
|
1155,94
|
9288,66
|

|

|
.4 Обработка результатов динамического анализа с помощью ЭВМ.
По результатам расчета на ЭВМ строим график реакций и , график реакций в направляющих
ползуна и годограф реакции .
График реакций  и
и  .
.
Принимаем  .
.
Ординаты графиков определяем по формулам
Результаты вычислений ординат приведены в таблице 9
График реакции  в направляющих ползуна.
в направляющих ползуна.
Масштабный коэффициент  принимаем равным масштабному коэффициенту на плане положений
принимаем равным масштабному коэффициенту на плане положений
 .
.
Принимаем  .
.
Ординаты графика определяем по формуле

Результаты вычислений ординат приведены в таблице 9
Годограф реакции  .
.
Строим зависимость реакции  от угла
от угла  . Принимаем
. Принимаем  .
.
Ординаты графика определяем по формуле

Результаты вычислений ординат приведены в таблице 9.
Таблица 9
|
Nпол
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
11
|
12
|
13
|
|
 ,мм ,мм
|
2
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
109
|
75
|
30
|
2
|
|
 мм мм
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
109
|
76
|
30
|
1
|
|
 мм мм
|
0
|
1
|
1
|
1
|
1
|
1
|
1
|
-1
|
-1
|
164
|
98
|
23
|
0
|
|

|
4
|
4
|
4
|
4
|
4
|
4
|
4
|
4
|
4
|
161
|
111
|
44
|
4
|
Вывод: по результатам динамического расчета определяем максимальные
величины и направления реакций в кинематических парах, на основании которых
можно проводить прочностной расчет элементов конструкции:
выбор материалов и размеров сечений звеньев;
определение типа подшипников;
упрочнение наиболее нагруженных участков направляющих.
4. СИНТЕЗ ЛОГИЧЕСКОЙ СИСТЕМЫ УПРАВЛЕНИЯ МЕХАНИЗМАМИ
МАШИНЫ-АВТОМАТА
.1 Задача синтеза
В машинах-автоматах системой управления по пути называется система
управления, обеспечивающая требуемую согласованность перемещений исполнительных
органов в зависимости от их положения. Программа для системы управления по пути
задаётся обычно в виде тактограммы. Тактограммой машины-автомата называется
схема согласованности перемещений исполнительных органов в зависимости от их
положений. На тактограмме весь цикл движения разделён на отдельные такты.
Тактом движения называется промежуток, в течение которого, не меняется состояние
(наличие или отсутствие движения) ни одного из исполнительных органов. Шифр
тактограммы состоит из номеров механизмов. Номер каждого механизма входит
дважды: первое указание номера означает, что в соответствующем такте происходит
прямой ход, а второе указание номера отвечает обратному ходу. Синтез системы
путевого управления движением механизмов M1, M2 и M3 состоит в построении схемы
соединения электромагнитных элементов, обеспечивающих движение механизмов в
соответствии с данной тактограммой 311232. Цикл работы состоит из шести тактов:
- прямой ход механизма М3;
- прямой ход механизма М1;
- обратный ход механизма М1;
- прямой ход механизма М2;
- обратный ход механизма М3;
- обратный ход механизма М2.
Наклонные линии на тактограммах соответствуют тактам движения, а
горизонтальные - тактам выстоя.
4.2 Проверка реализуемости тактограммы 311232
Тактограмма считается реализуемой, если наборы входных сигналов в начале
каждого такта различны. Из тактограммы видно, что в начале тактов 2 и 4 наборы
сигналов совпадают(х1=1, х2=1, х3=0) т.е.
тактограмма не реализуема т.к. одна и таже комбинация сигналов должна вызывать
различные движения механизмов. Чтобы легче найти совпадающие комбинации удобно
их рассматривать как числа записанные в двоичной системе. Сигналом Х1
приписываем вес 20=1, сигналу Х2 -вес 21=2, сигналу Х3-вес
22=4. Сумма сигналов умноженная на их веса даёт искомое число в
десятичной системе, которая называется весом такта. Определяем веса
тактов:=1*1+2*1+4*1=7;=1*1+2*1+4*0=3;=1*0+2*1+4*0=2;=1*1+2*1+4*0=3;=1*1+2*0+4*0=1;=1*1+2*0+4*1=5.
Имеются одинаковые наборы сигналов в тактах 2 и 4 (Q2=Q4=3), поэтому для
реализуемости тактограммы вводим элемент памяти П с входным сигналом z. Z=1
соответствует включению памяти, а Z=0 - выключению. Включаем память в 1-ом
такте, а выключаем в 3-ем. При этом сигналу z приписываем вес равный 23=8.
Определяем веса тактов с памятью:П=Q1+8*1=15;П=Q2+8*1=11;П=Q3+8*0=2;П=Q4+8*0=3;П=Q5+8*0=1;П=Q6+8*0=5;
Совпадающих весов нет.
4.3 Составление таблицы включения
Таблица включает 8 логических тактов т.к. такты 1 и 3 в которых
включается и выключается память разбиваются на логические такты 1а, 1б, 3а и
3б. В верхней части таблицы повторяются все сигналы Xi и Z указанные
ранее. При этом надо иметь ввиду, что сначала изменяется комбинация сигналов от
конечных выключателей (такты 1а и 3а), а затем включается или выключается
память (такты 1б и 3б). При переходе от одного логического такта к другому
меняется значение только одного сигнала, этот сигнал называется тактирующим и
отмечается звёздочкой. Нижняя часть таблицы содержит выходные сигналы на
включение (fZ) и выключение ( ) памяти, а так же сигналы fi -
на движение механизмов вперёд и
) памяти, а так же сигналы fi -
на движение механизмов вперёд и  на движение механизмов назад. Эти состояния являются рабочими
и отмечаются 1. При этом соответствующий инверсный сигнал равен нулю. От такта,
где fi=0(или fZ=0)до такта, где fi=1 (или fZ=1)
по ходу цикла отмечаем запрещенные состояния fi=0(или fZ=0).
Остальные состояния являются безразличными и отмечаются прочерками. Например:
на движение механизмов назад. Эти состояния являются рабочими
и отмечаются 1. При этом соответствующий инверсный сигнал равен нулю. От такта,
где fi=0(или fZ=0)до такта, где fi=1 (или fZ=1)
по ходу цикла отмечаем запрещенные состояния fi=0(или fZ=0).
Остальные состояния являются безразличными и отмечаются прочерками. Например:
Для механизма М1 ставим рабочие состояния f1=1 и  =1 соответственно в тактах 2 и 3б
тогда запрещенные состояния f1=0 ставим в тактах 1а, 3б, а =0 в такте 2. Безразличные состояния,
следующие за рабочими, характеризуются тем, что в них может повторяться (или не
повторяться) сигнал на выполнение соответствующего действия.
=1 соответственно в тактах 2 и 3б
тогда запрещенные состояния f1=0 ставим в тактах 1а, 3б, а =0 в такте 2. Безразличные состояния,
следующие за рабочими, характеризуются тем, что в них может повторяться (или не
повторяться) сигнал на выполнение соответствующего действия.
4.4 Составление формул включения и их упрощение
Исходные
формулы включений составляются в виде логического произведения входных сигналов
 и
и  причем в
эти формулы не входят сигналы от того устройства, для которого составляется
формула. Для каждого выхода
причем в
эти формулы не входят сигналы от того устройства, для которого составляется
формула. Для каждого выхода  (или Fz)
выписываем из таблицы включений соответствующие значения входных сигналов в
рабочем и запрещенных состояниях. При записи формул включений значению =1(или
(или Fz)
выписываем из таблицы включений соответствующие значения входных сигналов в
рабочем и запрещенных состояниях. При записи формул включений значению =1(или  )
соответствует запись (или ), а
значению =0(или
)
соответствует запись (или ), а
значению =0(или  ) -
) -  ( или
( или  ).
).
Например:
Для
движения механизма М1 вперед должно быть x2=1, x3=0*,
z=1. Поэтому исходная формула имеет вид  .
.
Для
исходной формулы включения часто удаётся подобрать упрощённый вариант,
содержащий меньшее число сигналов, но обладающий теми же свойствами, что
исходная формула:
Исходная
и упрощенные формулы равны 1 в рабочем состоянии и 0 в запрещенных. При
упрощении исходных формул учитывается следующее:
А)
упрощенная формула должна содержать тактирующий сигнал;
Б)
набор сигналов в упрощенной формуле не должен встречаться в запрещенных
состояниях;
Например:
Исходная
формула упрощается к виду  , т.к.
набор сигналов
, т.к.
набор сигналов  не встречается в запрещенных состояниях.
не встречается в запрещенных состояниях.
4.5 Составление схемы системы управления
Каждый
механизм имеет двухсторонний гидрораспределитель, на который подаются
управляющие сигналы и  , от
соответствующих электромагнитных реле.
, от
соответствующих электромагнитных реле.
Перемещение
подвижных частей гидрораспределителя происходит под действием электромагнитов.
Каждое реле изображается в виде квадрата, включённого в электрическую цепь.
Контакты реле памяти ( и )
изображаются непосредственно в тех цепях, в которых они должны быть по формулам
включения. При этом каждому соответствуют
нормально разомкнутые контакты, а -
нормально замкнутые. Если по цепи, в которую включено реле  , пойдёт ток
, пойдёт ток  , то
нормально разомкнутые контакты замкнутся (), что
означает включение памяти. Память остается включенной и после исчезновения тока
в обмотке реле , для выключения памяти необходим другой сигнал
, то
нормально разомкнутые контакты замкнутся (), что
означает включение памяти. Память остается включенной и после исчезновения тока
в обмотке реле , для выключения памяти необходим другой сигнал  , при котором нормально разомкнутые контакты
замкнутся, нормально замкнутые - разомкнутся (
, при котором нормально разомкнутые контакты
замкнутся, нормально замкнутые - разомкнутся ( ).
Контакты реле, управления гидрораспредилителями включены в цепи их
электромагнитов. Для логического преобразования входных сигналов , ; , в выходные сигналы ,, ,
).
Контакты реле, управления гидрораспредилителями включены в цепи их
электромагнитов. Для логического преобразования входных сигналов , ; , в выходные сигналы ,, , в электрическую цепь каждого реле включаются те
нормально разомкнутые контакты включателей, сигналы от которых входят в
соответствующие упрощённые формулы включения. Кроме того, в цепь каждого реле и дополнительно
вводятся нормально замкнутые контакты от инверсных выключателей, размыкающие
цепь, как только закончится соответствующий ход поршня.
в электрическую цепь каждого реле включаются те
нормально разомкнутые контакты включателей, сигналы от которых входят в
соответствующие упрощённые формулы включения. Кроме того, в цепь каждого реле и дополнительно
вводятся нормально замкнутые контакты от инверсных выключателей, размыкающие
цепь, как только закончится соответствующий ход поршня.
Например:
В
цепь реле 
 согласно
формуле включения последовательно включаются замыкающий контакт
согласно
формуле включения последовательно включаются замыкающий контакт  и замыкающие контакты z реле памяти. Кроме того для
размыкания цепи реле после прямого хода М1 включается нормально замкнутый
включатель
и замыкающие контакты z реле памяти. Кроме того для
размыкания цепи реле после прямого хода М1 включается нормально замкнутый
включатель  . Все конечные выключатели показываются в ненажатом
положении. Схема управлений показана в состоянии начала первого такта, когда
все поршни занимают крайнее левое положение.
. Все конечные выключатели показываются в ненажатом
положении. Схема управлений показана в состоянии начала первого такта, когда
все поршни занимают крайнее левое положение.
СПИСОК
ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Анципорович
П.П. и др. Методическое пособие по курсовому проектированию по дисциплине
«Теория механизмов и машин» для студентов технических специальностей. - Мн.:
БГПА,1994.-85с.
. Анципорович
П.П. и др. Синтез кривошипно-ползунных механизмов. - Мн.: БНТУ,2006.-22с.
. Динамика
машин и механизмов в установившемся режиме движения/ Анципорович П.П. и др. -
Мн.: БНТУ,2007.-47с.
. Курсовое
проектирование по теории механизмов и машин/ Под ред. Г.Н. Девойно. - Мн.,
«Высшая школа», 1986. -286 с.