Цифровые и аналоговые теплоизмерительные механизмы и их элементы
Реферат на тему:
Цифровые и аналоговые теплоизмерительные механизмы и их элементы
Содержание
Введение
Классификация аналоговых измерительных механизмов
Магнитоэлектрическая система
Электромагнитная система
Электродинамическая система
Электростатическая система
Ферродинамическая система
Тепловая система
Индукционная система
Цифровые приборы
Основные понятия и определения
Аналого-цифровой преобразователь
Список литературы
Введение
Измерение есть процесс сравнения измеряемой величины с величиной того же
рода, условно принятой за единицу. Результат измерения выражают числом,
показывающим отношение измеряемой величины к единице измерения. Вещественное
воспроизведение единицы измерения, ее дробного или кратного значения называют
мерой.
Устройство, служащее для сравнения измеряемой величины с единицей
измерения или с мерой, называют измерительным прибором. При измерении величины
пользуются мерами и измерительными приборами и применяют различные способы или
методы измерений. Прямыми методами измерений считают такие методы, при которых
измеряемая величина непосредственно сравнивается с величиной того же рода.
Прямые методы делятся на методы непосредственной оценки и методы
сравнения.
Метод непосредственной оценки. Метод, при котором измеряемая величина
непосредственно определяется по показанию измерительного прибора,
проградуированного в значениях измеряемой величины, например измерение тока -
амперметром, мощности - ваттметром и т. д.
Метод сравнения. Метод, при котором измеряемая величина определяется
путем непосредственного сравнения с мерой данной величины; например, измерение
напряжения путем сравнения его с ЭДС нормального элемента.
К методам сравнения относятся:
) нулевой метод;
) дифференциальный метод;
) метод замещения.
Нулевой метод. В этом случае действие на прибор измеряемой величины или
величины, функционально с ней связанной, сводится к нулю встречным действием
известной величины того же рода; например, измерение э. д. с. путем компенсации
ее известным напряжением; измерение сопротивления при помощи моста.
Дифференциальный метод. При этом методе прибором определяется разность
между измеряемой и известной величинами; например, дифференциальный метод
определения потерь в стали.
Метод замещения. Метод, при котором замещение измеряемой величины
известной величиной не вызывает изменения показания измерительного прибора;
например, измерение сопротивлений методом замещения.
Косвенными методами измерений называются такие методы, при которых
искомая величина не измеряется непосредственно, а вычисляется на основании
измерений других величин и известных соотношений между измеренными величинами и
искомой величиной. Например, измерение сопротивления проводника можно
произвести, измеряя силу тока в проводнике амперметром, а напряжение на его
зажимах - вольтметром. Зная соотношение между силой тока I, напряжением U и сопротивлением RX, можно вычислить последнее по
формуле

В электротехнической практике наибольшее распространение получил прямой
метод непосредственной оценки, как наиболее простой и требующий наименьшего
времени для производства измерения, хотя и обеспечивающий невысокую точность
измерений, не превышающую 0,2-10%,
Для более точных измерений до 0,001% пользуются нулевым и
дифференциальным методами, требующими значительно большего времени для
производства измерений, а также более сложной и дорогой аппаратуры.
Классификация
аналоговых измерительных механизмов
Магнитоэлектрическая
система
В магнитоэлектрических измерительных механизмах перемещение подвижной
части происходит вследствие взаимодействия магнитного поля постоянногомагнита и
тока, проходящего по катушке.
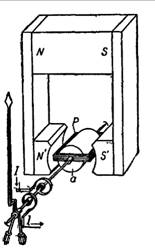
Рисунок 1.1. Измерительный механизм магнитоэлектрической системы
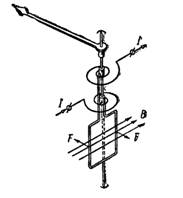
Рисунок 1.2. Путь тока в измерительном механизме магнитоэлектрической
системы.
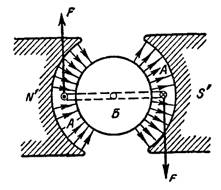
Рисунок 1.3. Взаимодействие между током и магнитным полем.
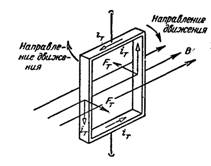
Рисунок 1.4. Получение тормозного момента.
Измерительный механизм магнитоэлекрической системы, изображенной на
рисунке 1.1, состоит из постоянного магнита, магнитопровода и подвижной части.
Описанный измерительный механизм является механизмом с подвижной катушкой. При
протекании по обмотке рамки постоянного тока между ним и магнитным полем
возникает механическое взаимодействие (рис. 1.2 и 1.3). Под влиянием сил F,
направленных под прямым углом к вектору магнитной индукции В, подвижная часть
стремится повернуться на некоторый угол. По углу поворота подвижной части можно
определить напряжение на зажимах измерительного механизма; иначе говоря, он
может быть использован для измерения напряжения.
Успокоителем является алюминиевая рамка, изображенная на рисунке 1.4.При
всяком движении подвижной части изменяется магнитный поток, пронизывающий
каркас, и в нем наводится ЭДС. Эта ЭДС вызовет в каркасе ток  , взаимодействие которого с магнитным
полем постоянного магнита создает тормозной момент, обеспечивающий быстрое
успокоение.
, взаимодействие которого с магнитным
полем постоянного магнита создает тормозной момент, обеспечивающий быстрое
успокоение.
Электромагнитная
система
В электромагнитных измерительных механизмах перемещение подвижной части
происходит вследствие взаимодействия магнитного поля измеряемого тока,
проходящего по катушке, и одного или нескольких сердечников из ферромагнитного
материала. Измерительные механизмы электромагнитной системы выполняют с плоской
катушкой и с круглой катушкой.
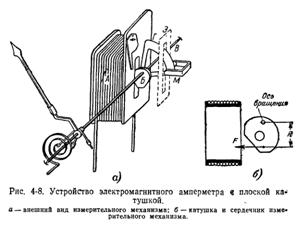
Рисунок 2.1 Устройство электромагнитного амперметра с плоской катушкой. а
- внешний вид измерительного механизма; б -катушка и сердечник измерительного
механизма.
В измерительных механизмах первого типа обмотки неподвижной катушки А
(рис. 2.1) наматываются на каркас. На оси В укреплен сердечник Б из стали или
пермаллоя. На той же оси укреплены указательная стрелка с грузиками для
уравновешивания подвижной части, спиральная пружина и алюминиевый сектор Г
магнитоиндукционного успокоителя.
При прохождении по катушке постоянного тока создается магнитное поле и
сердечник Б намагничивается. Возникающая при этом сила взаимодействия F будет
втягивать сердечник в катушку А, стремясь переместить его в положение, при
котором запасенная в магнитном поле энергия W будет иметь наибольшее значение.
Вращающий момент будет равен квадрату силы тока проходящего через катушку.
Электродинамическая
система
В электродинамических измерительных механизмах перемещение подвижной
части происходит вследствие электродинамического взаимодействия между токами,
проходящими по неподвижной и подвижной катушкам.
Измерительный механизм электродинамической системы (рис. 3.1) состоит из
двух катушек: неподвижной Б и подвижной В. Неподвижная катушка часто делится на
две части (рис. 3.2).
Подвижная катушка располагается внутри неподвижной на одной оси с
указательной стрелкой, крылом воздушного успокоителя и двумя спиральными
пружинами, служащими для подвода тока к подвижной катушке и создания
противодействующего момента. При прохождении по катушкам прибора постоянных
токов I1 и I2 возникает магнитное поле, в котором
запасается энергия. Взаимодействие токов, проходящих в катушках, приводит к
получению вращающего момента, действующего на подвижную катушку и стремящегося
повернуть ее в положение, при котором энергия магнитного поля катушек будет
наибольшей.
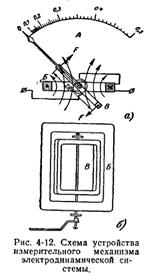
Рисунок 3.1. Схема устройства измерительного механизма
электродинамической системы
Таким образом, угол поворота подвижной части логометра определяется
отношением слагающих токов в подвижных катушках, совпадающих по фазе с током в
неподвижной катушке.
Отсутствие стали в измерительном механизме, а следовательно, и отсутствие
влияния гистерезиса и вихревых токов на показания дают возможность изготовлять
измерительные механизмы этой системы, обладающие высокой точностью.
С другой стороны, магнитное поле у этих измерительных механизмов является
слабым и, следовательно, они в сильной степени подвержены влиянию внешних
магнитных полей.
Для уменьшения дополнительной погрешности от внешнего магнитного поля
применяются астатические измерительные механизмы. Астатический механизм имеет
две неподвижные и две подвижные катушки (рис. 3.4). Магнитные поля неподвижных
катушек имеют противоположные направления. Токи в подвижных катушках также
направлены взаимно противоположно. Таким образом, вращающие моменты, созданные
токами в катушках имеют одинаковые направления. Благодаря различным
направлениям токов в подвижных катушках увеличение вращающего момента одной
подвижной катушки, вызванное внешним равномерным полем, компенсируется таким же
уменьшением вращающего момента второй катушки, вызванным тем же внешним
магнитным полем.
Вторым средством уменьшения дополнительных погрешностей от внешнего
магнитного поля является применение экранирования. Внешнее магнитное поле
замыкается через экраны и практически не попадает в измерительный механизм. Для
экранов лучше применять пермаллой, имеющий наибольшую магнитную проницаемость
при малой напряженности поля, что соответствует условиям эксплуатации прибора.
Благодаря слабому магнитному полю электродинамические приборы обладают
сравнительно небольшим вращающим моментом, а это обстоятельство при желании
получить прибор высокого класса точности требует уменьшения погрешности от
трения. Этой цели достигают разумным уменьшением веса подвижной части, самым
тщательным подбором материалов для осей и подпятников и безупречной их
обработкой.

Рисунок 3.2. Устройство измерительного механизма электродинамической
системы.
Все это приводит к тому, что, с одной стороны, повышается стоимость
прибора, с другой стороны, приборы получаются сравнительно чувствительными к
перегрузкам и механическим воздействиям и, следовательно, требуют самого
бережного и внимательного отношения и обслуживания.
Электростатическая
система
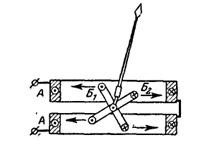
Рисунок 3.3. Схема устройства измерительного механизма логометра
электродинамической системы
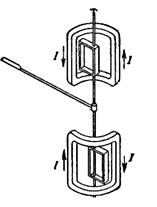
Рисунок 3.4. Устройство астатического измерительного механизма
электродинамической системы.
В электростатических измерительных механизмах для перемещения подвижной
части используется взаимодействие между двумя или несколькими электрически
заряженными проводниками.
На рис. 4.1. дана схема устройства одного из измерительных механизмов
этой системы. Он состоит из двух неподвижных параллельно расположенных
металлических пластин АА и одной подвижной секторообразной алюминиевой пластины
укрепленной на одной оси с указательной стрелкой.При наличии постоянного
напряжения на зажимах неподвижные пластины будут заряжены электричеством одного
знака, а подвижная - электричеством другого знака. Между пластинками возникает
электрическое поле. Под действием сил электрического поля подвижная пластина
будет втягиваться в пространство между неподвижными пластинами, стремясь занять
положение, при котором запасенная в электрическом поле энергия будет иметь
наибольшее значение.Угол поворота подвижной части прибора пропорционален
квадрату измеряемого напряжения в цепи постоянного тока и квадрату действующего
значения напряжения в цепи переменного тока.
На рис. 4.2 изображена другая конструкция электростатического механизма,
состоящего из двух неподвижных пластин и одной подвижной (средней), подвешенной
на тонких бронзовых ленточках. Если соединить левую и среднюю пластины и
подключить их к одному проводу сети, а правую пластину - к другому проводу, то
пластины, заряженные одноименно, будут отталкиваться, а заряженные разноименно
- притягиваться, вследствие чего подвижная пластина будет перемещаться по
направлению к пластине, заряженной электричеством противоположного знака
(вправо). Это движение передается указательной стрелке. Шкала механизма, как и
в предыдущем случае, неравномерна.Рассмотренные измерительные механизмы
изготовляются на номинальные напряжения 1-15 кв.
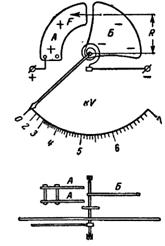
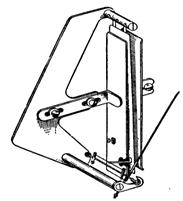
Рисунок 4.2. Другая конструкция электростатического измерительного
механизма
Ферродинамическая
система
Представляя собой разновидность электродинамических измерительных
механизмов, ферродинамические отличаются от них наличием магнитопровода из
магнито-мягкого материала.
Неподвижная катушка из двух половин расположена на двух стержнях
магнитопровода, выполненного из листовой стали. Вокруг цилиндрического
сердечника в воздушном зазоре помещается подвижная катушка, укрепленная на
одной оси со стрелкой. Подвижная катушка выполняется без металлического каркаса
во избежание появления в нем индуктированных токов. В воздушном зазоре
образуется сильное равномерное магнитное поле, индукция которого
пропорциональна току неподвижной катушки.
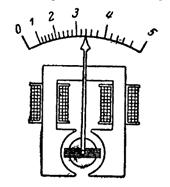
Рисунок 5.1. Устройство измерительного механизма ферродинамическойсистемы
Взаимодействие тока подвижной катушки с магнитным полем в воздушном
зазоре создает вращающий момент, который, как и в электродинамическом
измерительном механизме, пропорционален произведению действующих значений токов
катушек и косинусу угла сдвига между ними.
Благодаря малому сопротивлению магнитной цепи в воздушном зазоре могут
быть получены весьма значительная магнитная индукция, а следовательно, и
большой вращающий момент.
Значительное увеличение вращающего момента по сравнению с
электродинамическими механизмами дает возможность увеличить вес подвижной части
без увеличения погрешности от трения и, следовательно, обеспечивает возможность
получения прочной подвижной части. Большая магнитная индукция в воздушном
зазоре делает показания прибора практически независимым от внешних магнитных
полей. С другой стороны, применение стали влечет за собой появление
составляющих основной погрешности от гистерезиса и вихревых токов.
Тепловая
система
В измерительных механизмах тепловой системы используется тепловое
действие электрического тока, которое вызывает удлинение или изгиб
биметаллического проводника.
Рисуное 6.1. Схема устройства теплового измерительного механизма
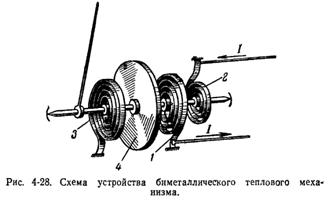
Рисунок 6.2. Схема устройства биметаллического теплового механизма
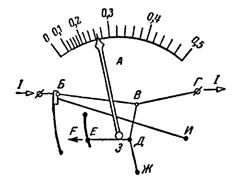
На рис. 4.1 дана схема устройства одного из измерительных механизмов.
Тонкая платино-иридиевая проволока укреплена между зажимами БГ. К ней
прикреплена вторая - ВЖ, неподвижно закрепленная в точке Ж. К середине второй
проволоки прикрепляется шелковая нить, переброшенная через блок 3 и укрепленная
на конце пружины Е. На одной оси с блоком укреплены указательная стрелка и
алюминиевый сектор магнитоиндукционного успокоителя. При прохождении тока по
проволоке БВГ она нагревается и удлиняется, точка В опускается и пружина Е
получает возможность переместить шелковую нить ДЗЕ влево. Это перемещение
влечет за собой поворот подвижной части механизма.
Удлинение проволоки БВГ пропорционально количеству выделенного током
тепла в единицу времени,а следовательно, пропорционально квадрату тока:

где  - удлинение проволоки;
- удлинение проволоки;
 - коэффициент пропорциональности.
- коэффициент пропорциональности.
Так как угол поворота подвижной части зависит от удлинения проволоки, то
он будет зависеть и от тока,
т. е.

Для уменьшения влияния температуры окружающей среды на натяжение
проволоки, а следовательно, и на показания прибора зажим Б укрепляется на конце
пружины. Положение этого зажима определяется длиной компенсационной проволоки
БИ, имеющей примерно такой же температурный коэффициент удлинения, как и
проволока БВГ. При изменении температуры изменяется длина компенсационной
проволоки, и зажим Б перемещается так, что натяжение проволоки БВГ остается
независимым от температуры.
Успокоение магнитоиндукционное осуществляется c помощью постоянного магнита и алюминиевого сектора,
укрепленного на одной оси со стрелкой. Показания прибора одинаковы на
постоянном и переменном токе и почти не зависят от внешних магнитных и
электрических полей. Проволока, нагреваемая током, практически безреактивна, и
поэтому такие приборы используются при измерениях на высоких частотах. В
настоящее время вместо тепловых приборов изготавливаются термоэлектрические
приборы.
Применяются также тепловые измерительные механизмы с использованием
изгиба проводника (биметаллические механизмы), в которых измеряемый ток
проходит по биметаллической рабочей спирали 1 (рис. 4.2). Спиральная пружина 2
служит для подвода тока к спирали 1. Вторая биметаллическая пружина 3,
намотанная встречно относительно первой, служит для компенсации температурных
влияний окружающей среды. Шайба 4 изолирует спираль 3 от тепла, выделяемого
измеряемым током в рабочей спирали. Биметаллический измерительный механизм
нечувствителен к кратковременным перегрузкам и не регистрирует кратковременных
импульсов тока или напряжения. Применяются такие механизмы в самопишущих
приборах или для указания длительных перегрузок.
Индукционная
система
В индукционных измерительных механизмах перемещение подвижной части
происходит вследствие взаимодействия переменных магнитных потоков с токами,
наведенными в подвижной части механизма.
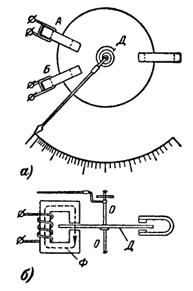
Рисунок 7.1. Устройство индукционного двухпоточного измерительного
механизма.
Алюминиевый диск, укрепленный на одной оси с указательной стрелкой,
охватывается двумя электромагнитами А и Б.
По обмотке электромагнитов проходят синусоидальные токи I1 и I2 сдвинутые по фазе на  . Токи в обмотках вызывают магнитные
потоки
. Токи в обмотках вызывают магнитные
потоки  , которые при ненасыщенных сердечниках
будут синусоидальны и совпадают по фазе с намагничивающими токами. Магнитные
потоки , пронизывая диск, индуктируют в нем
ЭДС Е1 и E2 отстающие по фазе от потоков на угол
, которые при ненасыщенных сердечниках
будут синусоидальны и совпадают по фазе с намагничивающими токами. Магнитные
потоки , пронизывая диск, индуктируют в нем
ЭДС Е1 и E2 отстающие по фазе от потоков на угол  . Под действием этих ЭДС в диске
возникают вихревые токи
. Под действием этих ЭДС в диске
возникают вихревые токи  (рис.7.3), которые при относительно малом индуктивном
сопротивлении диска совпадают по фазе с соответствующими ЭДС Е1 и Е2.
(рис.7.3), которые при относительно малом индуктивном
сопротивлении диска совпадают по фазе с соответствующими ЭДС Е1 и Е2.
Выбрав положительные направления магнитных потоков в сердечниках, нанесем, пользуясь
правилом буравчика, положительные направления вихревых токовв диске (рис. 7.3). В результате
взаимодействия вихревых токов, наведенных в диске, и магнитных потоков,
пронизывающих диск, возникают два вращающих момента: M1 и М2,
вызванные взаимодействием потока  с током
с током и потока
и потока  током
током '.
'.
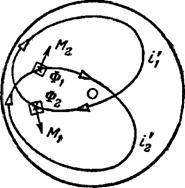
Рисунок 7.3. Вихревые токи в диске индукционного измерительного механизма
Таким образом, как вращающий момент, так и угол поворота подвижной части
механизма индукционной системы пропорциональны произведению частоты переменного
тока, магнитных потоков, пронизывающих диск, и синуса угла сдвига между ними
или произведению частоты, действующих значений токов, возбуждающих эти потоки и
синуса угла сдвига между ними. Благодаря незначительному сопротивлению
магнитной цепи индукционные измерительные механизмы обладают сильным магнитным
полем, а следовательно, большим вращающим моментом и малой чувствительностью к
внешним магнитным полям. Большой вращающий момент дает возможность иметь
прочную подвижную часть, что обеспечивает стойкость механизма к перегрузкам.
Изменение температуры влияет на величину сопротивления диска и активные
сопротивления обмоток и следовательно, на показания механизмов. В настоящее
время индукционные измерительные механизмы используются главным образом в счетчиках
электроэнергии.
На рис. 7.1 , помимо двух электромагнитов, показан постоянный магнит,
который в ваттметрах выполняет роль успокоителя, а в счетчиках электроэнергии
служит для создания тормозного момента.
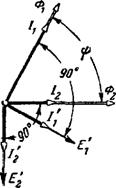
Рисунок 7.2.
Векторная диаграмма индукционного измерительного механизма
Цифровые
приборы. Основные понятия и определения
В настоящее время широко применяются цифровые измерительные приборы
(ЦИП), имеющие ряд достоинств по сравнению с аналоговыми электроизмерительными
приборами. Цифровыми называются приборы, автоматически вырабатывающие
дискретные сигналы измерительной информации, показания которых представляются в
цифровой форме. В цифровых приборах в соответствии со значением измеряемой
величины образуется код, а затем в соответствии с кодом измеряемая величина
представляется на отсчетном устройстве в цифровой форме.
Применительно к цифровым приборам код - серия условных сигналов (обычно
электрических) или комбинация состояний или положений элементов ЦИП. Код может
подаваться в цифровое регистрирующее устройство, вычислительную машину или
другие автоматические устройства.
Неавтоматические лабораторные потенциометры и мосты с декадными
магазинами сопротивлений по существу являются цифровыми приборами
(неавтоматическими), так как в них положение ручек (штепселей) декадных
магазинов сопротивления после уравновешивания (оператором) образует код и
результат выражается в цифровой форме.
Развитие электроизмерительной техники, а также других смежных областей
привело к созданию автоматических цифровых приборов, которые будут
рассматриваться в этой главе.
Цифровой прибор включает в себя два обязательных функциональных узла:
аналого-цифровой преобразователь (АЦП) и цифровое отсчетное устройство.
Аналого-цифровой
преобразователь
Аналого-цифровой преобразователь - функциональный блок измерительного
устройства, осуществляющий преобразование аналоговой измеряемой величины в
цифровой сигнал. В АЦП аналоговая измеряемая величина представляется с помощью
нормированных значений, отстоящих друг от друга на шаг дискредитации.
Аналого-цифровые преобразователи являются не только составной частью ЦИП;
они также используются в измерительных информационных, управляющих и других
системах. АЦП выпускаются промышленностью и в качестве автономных устройств.
Для образования кода непрерывная измеряемая величина в ЦИП
дискретизируется во времени и квантуется по уровню.
Дискретизацией непрерывной во времени величины х (t) называется операция преобразования х
(t) в прерывную во времени, т. е. в величину, значения которой отличны от нуля
и совпадают с соответствующими значениями х (t) только в определенные моменты
времени. Промежуток между двумя соседними моментами времени дискретизации
называется шагом дискретизации, который может быть постоянным или переменным.
Квантованием по уровню непрерывной по уровню величины х(t) называется операция преобразования
х (t) в квантованную величину хк(t).
Квантованная величина - величина, которая может принимать в заданном диапазоне
определенное конечное число значений. Фиксированные значения квантованной
величины называются уровнями квантования. Разность между двумя ближайшими
уровнями называется ступенью, или шагом квантования, или квантом.
Код в ЦИП вырабатывается в соответствии с отождествляемым измеряемому
значению уровнем квантования. Отождествление может производиться с ближайшим
уровнем квантования, ближайшим большим или равным, ближайшим меньшим или
равным, а также с ближайшим большим или ближайшим меньшим или равным уровнем
квантования.
Число возможных уровней квантования определяется устройством ЦИП. От
числа уровней квантования зависит емкость (число возможных отсчетов) отсчетного
устройства. Например, если у ЦИП отсчетное устройство имеет максимальное
показание 999, то такой «прибор бесконечное множество значений измеряемой
величины в пределах от 0 до 999 отражает всего 1000 различными показаниями, т.
е. в этом приборе измеряемая величина преобразуется в квантованную, имеющую
1000 уровней квантования.
В результате квантования измеряемой величины по уровню возникает
погрешность дискретности, обусловленная тем, что бесконечное множество значений
измеряемой величины отражается лишь ограниченным количеством показаний ЦИП.
Возникновение погрешности дискретности иллюстрирует рис. 6.1, где х (t) -
график изменения измеряемой величины; хк (t) - график изменения квантованной величины при отождествлении
с ближайшим уровнем квантования; t1, t2, …,tn - моменты времени измерений; хr1, хк2, … xkn - уровни квантования; А1,А2,
..., An- ординаты, соответствующие
показаниям ЦИП при измерении х (t) в моменты
t1, t2, …,tn.
Как видно, в большинстве случаев измерений имеется разность между
показаниями ЦИП и значениями измеряемой величины в моменты измерений. Эта
разность есть абсолютная погрешность дискретности .
.
Погрешность дискретности присуща ЦИП и отсутствует у аналоговых приборов.
Однако эта погрешность не является препятствием для увеличения точности
прибора, так как соответствующим выбором числа уровней квантования погрешность
дискретности можно сделать сколь угодно малой.
Следует заметить, что погрешность, возникающая в результате округления
оператором отсчетов показаний аналогового прибора, аналогична погрешности
дискретности цифровых приборов.
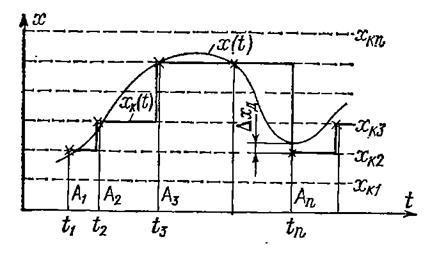
Рис. 8.1. Квантование непрерывной измеряемой величины по уровню и
дискретизация во времени
Иногда
возникает необходимость восстанавливать все значения непрерывной измеряемой
величины по ряду измеренных мгновенных значений. Практически это удается
сделать всегда с погрешностью, носящей название погрешности аппроксимации.