Цифровой режекторный фильтр
МИНИСТЕРСТВО
ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
РЯЗАНСКАЯ
ГОСУДАРСТВЕННАЯ РАДИОТЕХНИЧЕСКАЯ АКАДЕМИЯ
КАФЕДРА
РАДИОТЕХНИЧЕСКИХ СИСТЕМ
ЗАДАНИЕ НА
КУРСОВУЮ РАБОТУ
По дисциплине
«Техника цифровой обработки сигналов»
Студентка Шефлер
Анастасии Михайловне
код
__________ группа 111
1. Тема:
ЦИФРОВОЙ
РЕЖЕКТОРНЫЙ ФИЛЬТР
. Срок представления курсовой работы
к защите «31» марта 2005г.
. Исходные данные для проектирования:
а) Алгоритм обработки сигналов должен
соответствовать режекторному фильтру.
б) Требования к характеристикам
фильтра:
в) Характеристика входных данных - Analog
г) Характеристика выходных данных - Analog
д) Число разрядов операндов - 8
е) Ширина спектра флуктуаций помехи -
∆fT =0.16
ж) Коэффициент подавления помех - Кп
=-36 дБ
. Обязательные разделы пояснительной
записки курсовой работы
.1. Титульный лист.
.2. Задание на курсовую работу.
.3. Содержание.
.5. Анализ задачи и ее формализация.
.6. Определение требований к АЦП и
характеристикам цифрового фильтра.
.7. Выбор (синтез) структуры и параметров
(порядка и коэффициентов, разрядности, частоты дискретизации) цифрового
фильтра.
.8. Анализ частотных, импульсной и
переходных характеристик фильтра.
.9. Анализ ошибок квантования в
цифровом фильтре и методов их минимизации.
.10. Анализ эффективности подавления
помех.
.11. Выбор и технико-экономическое
обоснование элементной базы для реализации.
.12. Составление структурной схемы
устройства и описание ее работы.
.13. Расчет реального быстродействия
устройства.
.14. Заключение.
.15. Список использованных
источников.
Руководитель работы 13.02.05 В.И.
Кошелев
Задание принял к исполнению
3.03.05 студент ___________
Содержание
Анализ задачи и
ее формализация
Определение
требований к АЦП и характеристикам цифрового фильтра
Выбор (синтез)
структуры и параметров (порядка и коэффициентов, разрядности, частоты
дискретизации) цифрового фильтра
Анализ
частотных, импульсной и переходных характеристик фильтра
Анализ ошибок
квантования в цифровом фильтре и методов их минимизации
Анализ
эффективности подавления помех
Выбор и
технико-экономическое обоснование элементной базы для реализации
Составление
структурной схемы устройства и описание ее работы
Составление
модуля рабочей программы
Расчет
реального быстродействия устройства
Список
использованных источников
Приложение
Анализ задачи и ее
формализация
В данной курсовой работе требуется синтезировать и реализовать цифровой
режекторный фильтр, который обеспечивал бы подавление низкочастотной помехи с
требуемым коэффициентом подавления. Подобный фильтр может быть полезен при
обработке радиолокационных сигналов для удаления из спектра принимаемого
сигнала составляющих, соответствующих сигналу, отраженному от предметов,
движущихся с малыми скоростями. Такой сигнал является низкочастотной помехой.
Для этого используется цифровой режекторный фильтр, вырезающий низкие
частоты. АЧХ фильтра будет периодической. Существует несколько способов
реализации цифрового фильтра с заданной АЧХ. Наиболее часто используемый -
метод билинейного преобразования. Билинейное
преобразование заключается в прямой подстановке в H(s) вместо комплексной
частотной переменной s следующего выражения:
 (1.1)
(1.1)
где k - действительная положительная постоянная,
выбираемая следующим образом. Ось частот  в аналоговом случае в соответствии с (3.2) преобразуется в
единичную окружность
в аналоговом случае в соответствии с (3.2) преобразуется в
единичную окружность  так, что
так, что
 (1.2)
(1.2)
и поэтому частота среза  АЧХ аналогового фильтра будет соответствовать частоте среза
АЧХ аналогового фильтра будет соответствовать частоте среза  АЧХ цифрового фильтра, причем
АЧХ цифрового фильтра, причем
 (1.3)
(1.3)
Таким образом, зная две частоты среза, можно вычислить
постоянную ky пользуясь выражением (1.3). Билинейное
преобразование в виде, заданном формулами (1.1) - (1.3), облегчает
преобразование аналоговых фильтров с непрерывным временем (например, ФНЧ, ФВЧ и
т. д.), когда они преобразуются в цифровые фильтры того же вида (т. е. в ФНЧ,
ФВЧ и т. д.).
Такое преобразование применимо только к
частотным характеристикам, являющимся кусочно-постоянными, и неприменимо,
например, к интеграторам или другим фильтрам, имеющим частотную характеристику,
не являющуюся кусочно-постоянной.
Устойчивость полученного таким способом
цифрового фильтра гарантируется, если исходный аналоговый фильтр был устойчив и
область устойчивости в одной комплексной плоскости путем преобразования (1.1)
отображается в область устойчивости в другой комплексной плоскости.
По полученной таким образом  можно составить разностное уравнение, которое реализуется
програмно.
можно составить разностное уравнение, которое реализуется
програмно.
В данной курсовой работе для упрощения вычислений при расчете
коэффициентов фильтра используется программное обеспечение.
Определение требований к АЦП и
характеристикам цифрового фильтра
Требования, предъявляемые к АЦП и цифровому фильтру в
целом, основаны на техническом задании. Так необходимо обеспечить частоту
дискретизации сигнала равную 15кГц . Это означает, что аналогово-цифровой
преобразователь должен формировать на выходе последовательность кодов,
соответствующих входному непрерывному воздействию, с частотой 15кГц. В качестве
АЦП будем использовать микросхему КР572ПВ3. БИС КР572ПВ3 представляет собой АЦП
последовательных приближений. Алгоритм преобразования реализуется с помощью
регистра последовательных приближений.
Преобразователь этого типа, называемый в литературе
также АЦП с поразрядным уравновешиванием, является наиболее распространенным
вариантом последовательных АЦП.
В основе работы этого класса преобразователей лежит
принцип дихотомии, т.е. последовательного сравнения измеряемой величины с 1/2,
1/4, 1/8 и т.д. от возможного максимального значения ее. Это позволяет для
N-разрядного АЦП последовательного приближения выполнить весь процесс преобразования
за N последовательных шагов (итераций) вместо 2N-1 при использовании
последовательного счета и получить существенный выигрыш в быстродействии. Так,
уже при N=10 этот выигрыш достигает 100 раз и позволяет получить с помощью
таких АЦП до 105...106 преобразований в секунду. В то же время статическая
погрешность этого типа преобразователей, определяемая в основном используемым в
нем ЦАП, может быть очень малой, что позволяет реализовать разрешающую
способность до 18 двоичных разрядов при частоте выборок до 200 кГц
Цифровой фильтр должен успевать обрабатывать входные
отсчеты за то интервал дискретизации, чтобы работать в реальном времени.
Выбор (синтез) структуры и параметров
(порядка и коэффициентов, разрядности, частоты дискретизации) цифрового фильтра
Цифровой фильтр будет реализован на основе нерекурсивного фильтра, т.к.
такие фильтры просты в расчетах и всегда устойчивы. Структура нерекурсивного
фильтра выглядит следующим образом (рис.1):
цифровой режекторный фильтр помеха
Рис.1 Структура нерекурсивного
цифрового фильтра
Результаты сведены в таблицу1.
|
Порядок фильтра
|
1
|
2
|
3
|
4
|
5
|
6
|
|
Коэффициент подавления
помехи, дБ
|
10,64
|
19,93
|
27,94
|
34,85
|
40,66
|
45,05
|
Табл.1. Зависимость коэффициента
подавления помехи от порядка фильтра.
Т.о. можно остановиться на порядке
фильтра = 5.
Значения коэффициентов приведены в
таблице2.
|
№
|
0
|
1
|
2
|
3
|
4
|
5
|
|
значение
|
-1
|
3,66655
|
-6,280448
|
6,280448
|
-3,66655
|
1
|
Табл.2. Значения коэффициентов
цифрового оптимального фильтра.
Т.о. сразу можно сказать, что выполняется требование к линейности ФЧХ
фильтра. Теперь исследуем частотные характеристики, а так же импульсную и
переходную характеристики.
Анализ частотных, импульсной и
переходных характеристик фильтра
Программа вычисления частотных
характеристик в системе MathLab
выглядит следующим образом:
Полученные амплитудная и частотная характеристики изображены на рисунках
2 и 3 соответственно.

Рис.2. АЧХ полученного фильтра.

Рис.3. ФЧХ полученного фильтра.
Импульсная характеристика фильтра есть отклик фильтра на единичный
импульс, т.е. значения импульсной характеристики будут повторять коэффициенты
фильтра.
Программа вычисления импульсной характеристики в системе MathLab выглядит следующим образом:


Рис.4. Импульсная характеристика полученного фильтра.
Полученная импульсная характеристика
изображена на рисунке 4:
Переходная характеристика фильтра есть отклик фильтра на единичный
скачок. Программа вычисления переходной характеристики в системе MathLab выглядит следующим образом:

Полученная переходная характеристика изображена на рисунке 5.

Рис.5. Переходная характеристика полученного фильтра.
Анализ ошибок квантования в цифровом
фильтре и методов их минимизации
В реальных устройствах цифровой обработки
сигналов необходимо учитывать эффекты, обусловленные квантованием входных
сигналов и конечной разрядностью всех регистров. Источниками ошибок в процессах
обработки сигналов являются округление (усечение) результатов арифметических
операций, шум аналого-цифрового квантования входных аналоговых сигналов,
неточность реализации характеристик цифровых фильтров из-за округления их
коэффициентов (параметров). В дальнейшем с целью упрощения анализа
предполагается, что все источники ошибок независимы и не коррелируют с входным
сигналом.
Эффекты квантования приводят в конечном
итоге к погрешностям в выходных сигналах цифровых фильтров, а в некоторых
случаях и к неустойчивым режимам ЦФ. Выходную ошибку ЦФ будем рассчитывать как
суперпозицию ошибок, обусловленных каждым независимым источником.
Квантование чисел является нелинейной
операцией; m-разряд-ное
двоичное число А представляется b-разрядным двоичным
числом B = F(A), причем b<т. В результате квантования
число А представляется с ошибкой
e = B-A=F(A)-A (2.1)
Шаг квантования Q определяется
весом младшего числового разряда  При
квантовании используется усечение или округление.
При
квантовании используется усечение или округление.
Усечение числа
А состоит в отбрасывании  младших
разрядов числа, при этом ошибка усечения
младших
разрядов числа, при этом ошибка усечения
 (2.2)
(2.2)
Оценим величину ошибки в предположении  . Для положительных чисел при любом способе кодирования
. Для положительных чисел при любом способе кодирования  . Для отрицательных чисел при
использовании прямого и обратного кодов ошибка усечения неотрицательна:
. Для отрицательных чисел при
использовании прямого и обратного кодов ошибка усечения неотрицательна: , а в дополнительном коде эта ошибка неположительна:
, а в дополнительном коде эта ошибка неположительна: . Таким образом, во всех случаях абсолютное значение ошибки усечения
не превосходит шага квантования:
. Таким образом, во всех случаях абсолютное значение ошибки усечения
не превосходит шага квантования:
 (2.3)
(2.3)
Округление m-разрядного
числа А до b разрядов ( ): b-й разряд остается неизменным или увеличивается на единицу в
зависимости от того, больше
): b-й разряд остается неизменным или увеличивается на единицу в
зависимости от того, больше  или меньше отбрасываемая дробь 0,
или меньше отбрасываемая дробь 0,  , где ai - i-й разряд числа А,
, где ai - i-й разряд числа А,  . Округление
можно практически выполнить путем прибавления единицы к (b+1)-му разряду и усечения полученного числа до b разрядов. В таком случае ошибка округления
. Округление
можно практически выполнить путем прибавления единицы к (b+1)-му разряду и усечения полученного числа до b разрядов. В таком случае ошибка округления
 при всех способах кодирования лежит в
пределах
при всех способах кодирования лежит в
пределах
 (2.4)
(2.4)
и, следовательно,
 (2.5)
(2.5)
Рис.6.
Плотности вероятностей для ошибок квантования при округлении(слева) и усечении
(справа).
Квантование дискретных
сигналов (в АЦП и цифровых сигналов на выходах умножителей и сумматоров)
состоит в представлении отсчета (выборки сигнала) числами х(пТ), содержащими
b числовых разрядов. Квантование сигналов,
как и квантование чисел, является нелинейной операцией. Однако при анализе
процессов в ЦФ используется линейная модель квантования сигналов (рисунок 7),
где f(nT) -
дискретный или m-разрядный цифровой сигнал (m>b), x(nT) - квантованный b- разрядный
цифровой сигнал, ошибка квантования е (п Т) = х (п Т) -f(n T).
Верхнее значение ошибки квантования  определяется
по-прежнему соотношением (2.4) или (2.5).
определяется
по-прежнему соотношением (2.4) или (2.5).
Вероятностные оценки ошибок квантования основаны на предположениях
о том, что последовательность е(пТ) является стационарным случайным
процессом с равномерным распределением вероятности по диапазону ошибок
квантования и е(пТ) не коррелирован с f(nT). Математическое ожидание (среднее значение)
 и дисперсия
и дисперсия  ошибки квантования е определяются по формулам:
ошибки квантования е определяются по формулам:

где ре - плотность вероятности ошибки. По этим
формулам легко вычислить математическое ожидание и дисперсию для ошибок
округления и усечения:
 (2.6)
(2.6)
 (2.7)
(2.7)
Рис.7. Линейная модель квантования
сигналов.
Т.о.
возможность снижения ошибок квантования заключается в уменьшении значения шага
квантования  . Или, что эквивалентно, увеличении разрядов
квантования.
. Или, что эквивалентно, увеличении разрядов
квантования.
Анализ эффективности подавления помех
При проектировании фильтра и выборе его порядка получен коэффициент
подавления помехи 40,66 дБ, но это значение ухудшится из-за влияния шумов
квантования. Значение мощности шумов квантования в 8-разрядном цифровом фильтре
будет определяться следующим образом:

Это
значение мало и незначительно ухудшит полученный ранее коэффициент подавления
помехи.
Необходимо
отметить, что с возрастанием порядка фильтра коэффициент подавления помехи
возрастает и при необходимости всегда можно его увеличить, увеличив,
соответственно время обработки отсчетов.
Выбор и технико-экономическое
обоснование элементной базы для реализации
Для реализации потребуется:
1. 8-разрядный АЦП
2. Микропроцессор+ОЗУ+ПЗУ
. ЦАП
В качестве АЦП выбрана микросхема K572ПВ3, которая для нормальной работы нуждается в наличии
схемы выборки-хранения, в качестве которой выбрана микросхема K1100CK2.
Параметры АЦП:
Тактовая частота до 1,5 МГц
Опорное напряжение -10В, от +5 В
Диапазон входного аналогового
сигнала: от 0 В до 10В
Время преобразования tпp= 8TCLK АЦП
В качестве микропроцессора выбран пакет К1821, который имеет в своем
составе непосредственно сам микропроцессор К1821ВМ85, постоянное запоминающее
устройство (ПЗУ) микросхему КР1821РФ55 и оперативное запоминающее устройство
(ОЗУ) микросхему КР1821РУ55. Этот пакет выбран потому что изучался ранее.
В качестве ЦАП выбрана микросхема AD7533, которая представляет из себя 10-разрядный ЦАП. Обладает
следующими параметрами:
- разрешение 10 бит
время установления 800 нс
выходные токи 50 нА
VDD = +15V (опорное напряжение)
VREF = +1OV (напряжение питания)
Составление структурной схемы
устройства и описание ее работы
Т.о. в состав спроектированного фильтра входят АЦП, микропроцессорный
комплект К1821, ЦАП. Входной сигнал поступает на предварительный усилитель
(операционный усилитель), который приводит размах напряжения к уровню,
необходимому для работы АЦП (10В). Усиленный сигнал поступает на вход АЦП.
Также на АЦП подается напряжение смещения (5В) для перевода входного напряжения
в положительный диапазон. АЦП формирует 8-разрядный код, соответствующий уровню
входного сигнала. Как только отсчет сформирован АЦП формирует сигнал BUSY .
По этому сигналу на вход CLK
прекращают поступать тактовые импульсы. Это продолжается до тех пор, пока
микропроцессор не считает код по команде прерывания.
Бинарный код поступает в МПС через порт А микросхемы КР1821РУ55.
Микропроцессор обрабатывает код в соответствии с программой, хранящейся в
микросхеме ПЗУ КР1821РФ55.
Преобразованный код поступает на цифровой вход ЦАП через порт А
микросхемы КР1821РФ55.
Цифро-аналоговый преобразователь формирует ток на аналоговом выходе в
соответствии с входным кодом и опорным напряжением.
Два операционных усилителя на выходе предназначены для преобразования
тока на выходе ЦАП в напряжение.
Составление модуля рабочей программы
По вычисленным коэффициентам фильтра
можно составить разностное уравнение следующего вида:
,280448(D) =
0,01000111(B)
Предположим, x(n-2) хранится в ОЗУ с адресом X2, а результат надо записать по
адресу P2 тогда модуль умножения отсчета на
0,280448 будет выглядеть следующим образом:
|
Число тактов на выполнение
команды
|
|
LDA X2
|
13
|
|
ARHL
|
7
|
|
ARHL
|
7
|
|
ADD H
|
4
|
|
ARHL
|
7
|
|
ARHL
|
7
|
|
ARHL
|
7
|
|
ARHL
|
7
|
|
ADD H
|
4
|
|
ARHL
|
7
|
|
ADD H
|
4
|
|
ARHL
|
7
|
|
ADD H
|
4
|
7
|
|
Всего: 92
|
0.66655(D) = 0.10101010(B);
Предположим, x(n-1) хранится в ОЗУ с адресом X1, а результат надо записать по
адресу P2 тогда модуль умножения отсчета на
0,66655 будет выглядеть следующим образом:
|
Число тактов на выполнение
команды
|
|
LDA X1
|
13
|
|
ARHL
|
7
|
|
MOV H,A
|
7
|
|
ARHL
|
7
|
|
ARHL
|
7
|
|
ADD H
|
4
|
|
ARHL
|
7
|
|
ARHL
|
7
|
|
ADD H
|
4
|
|
ARHL
|
7
|
|
ARHL
|
7
|
|
ADD H
|
4
|
|
MOVE P1,H
|
7
|
|
Всего: 89
|
Расчет реального быстродействия
устройства
Как было подсчитано ранее число тактов на выполнение умножений равно
2(92+89)=362. Помимо этого в процессе определения выходного отсчета необходимо
выполнить 24 операции сложения, которые занимают в общей сложности
24(7+4+7)=432 такта. Т.о. в общее число тактов, необходимых для вычисления
одного выходного отсчета равно 794 такта.
Мы
дискретизируем входной сигнал с частотой 15 кГц, тогда максимальное время,
затрачиваемое на обработку одного выходного отсчета равно  .
.
При
тактовой частоте 1,5 МГц время обработки одного выходного отсчета равно  . Это нас не устраивает, поэтому придется поменять
элементную базу. Вместо микропроцессора будет использоваться ПЛИС фирмы ALTERA
семейства FLEX10K. Программа разрабатывалась на языке AHDL
с помощью пакета MAX+2.
. Это нас не устраивает, поэтому придется поменять
элементную базу. Вместо микропроцессора будет использоваться ПЛИС фирмы ALTERA
семейства FLEX10K. Программа разрабатывалась на языке AHDL
с помощью пакета MAX+2.
Модуль
программы без вычитателя выглядит следующим образом:
*************************************************************"ku";"summator";"n";"nn";filter
([7..0] : INPUT =GND;: INPUT;[15..0] :
OUTPUT;
)_HRAN : ku;[3..0] : summator;[1..0] : nn;[1..0] :
n;_HRAN.takt = TAKT;[].takt = TAKT;[1..0].takt = TAKT;[1..0].takt =
TAKT;_HRAN.vhod[7..0] = VHOD[7..0];[0].vhod[7..0] =
REG_HRAN.vihod[15..8];[1].vhod[7..0] = REG_HRAN.vihod[39..32];[0].vhod[7..0] =
REG_HRAN.vihod[23..16];[1].vhod[7..0] = REG_HRAN.vihod[31..24];
%суммируем
коэффициенты с отрицательным знаком%
SUMMER[0].a[7..0] = REG_HRAN.vihod[7..0];[0].b[7..0] =
shesty[0].vihod[7..0];[1].a[7..0] = try[1].vihod[7..0];
SUMMER[1].b[7..0]
= SUMMER[0].sum[7..0];
%суммируем
коэффициенты с положительным знаком%
SUMMER[2].a[7..0] = REG_HRAN.vihod[47..40];[2].b[7..0]
= shesty[1].vihod[7..0];[3].a[7..0] = try[0].vihod[7..0];[3].b[7..0] =
SUMMER[2].sum[7..0];[7..0] = SUMMER[3].sum[7..0];
VIHOD[15..8]
= SUMMER[1].sum[7..0];;
************************************************************
Модули
подпрограмм, использованных в головном проекте:
*************************************************************"summator";"mult";N
([7..0] : INPUT =GND;[7..0] :
OUTPUT;: INPUT;
)[2..0] : summator;:mult;
%подсоединен тактовый сигнал%
SUMMER[2..0].takt = TAKT;.takt = TAKT;
%блок
домножения входного отсчета на коэффициент 0,280448%
.vhod[7..0]
= VHOD[7..0];
%блок
суммирования для n-1 отсчета%
SUMMER[0].a[7..0] = VHOD[7..0];[0].b[7..0] =
VHOD[7..0];[1].a[7..0] = VHOD[7..0];[1].b[7..0] = MULTI.vihod[7..0];[2].a[7..0]
= SUMMER[0].sum[7..0];[2].b[7..0] = SUMMER[1].sum[7..0];
VIHOD[7..0]
= SUMMER[2].sum[7..0];;
*************************************************************
%регистр
хранения входных отсчетов
..0
последний отсчет по убыванию
..8
предпоследний отсчет по убыванию и т.д.
23..16
..24
..32
..40 n-5 отсчет %ku
([7..0] : INPUT ;: INPUT;[47..0] :
OUTPUT;
)[47..0] : dffe;[].clk = takt;[].ena = VCC;[7..0] =
VHOD[7..0];i in 9 to 48 generate[i-1].d = Tr[i-9].q;generate;
VIHOD[]=Tr[].q;
;
*************************************************************
%программа
перемножитель 8-битного числа на коэффициент 0,280448%
([7..0] : INPUT;: INPUT;[7..0] :
OUTPUT;
): summator;:
summator;.takt=takt;.takt=takt;.a[5..0]=vhod[7..2];.b[1..0]=vhod[7..6];.a[6..0]=su0.sum[6..0];.b[0]=vhod[7];
vihod[7..0]=su1.sum[7..0];;
*************************************************************
%программа
перемножитель 8-битного числа на коэффициент 0,66655
10101010%"summator.inc";multt
([7..0] : INPUT;: INPUT;[7..0] :
OUTPUT;
): summator;: summator;:
summator;.takt=takt;.takt=takt;.takt=takt;.a[6..0]=vhod[7..1];.b[4..0]=vhod[7..3];.a[2..0]=vhod[7..5];.b[0]=vhod[7];.a[7..0]=su0.sum[7..0];.b[7..0]=su1.sum[7..0];[7..0]=su2.sum[7..0];;
*************************************************************"summator";"multt";NN
([7..0] : INPUT =GND;[7..0] :
OUTPUT;: INPUT;
)[5..0] : summator;:multt;
%подсоединен тактовый сигнал%
SUMMER[5..0].takt = TAKT;.takt = TAKT;
%блок
домножения входного отсчета на коэффициент 0,280448%
.vhod[7..0]
= VHOD[7..0];
%блок
суммирования для n-1 отсчета%
SUMMER[0].a[7..0] = VHOD[7..0];[0].b[7..0] =
VHOD[7..0];[1].a[7..0] = VHOD[7..0];[1].b[7..0] = VHOD[7..0];[2].a[7..0] =
VHOD[7..0];[2].b[7..0] = VHOD[7..0];[3].a[7..0] =
SUMMER[0].sum[7..0];[3].b[7..0] = MULTTI.vihod[7..0];[4].a[7..0] =
SUMMER[1].sum[7..0];[4].b[7..0] = SUMMER[2].sum[7..0];[5].a[7..0] =
SUMMER[3].sum[7..0];[5].b[7..0] = SUMMER[4].sum[7..0];[7..0] =
SUMMER[5].sum[7..0];;
*************************************************************"summator";"mult";N
([7..0]
: INPUT =GND;[7..0] : OUTPUT;:
INPUT;
)[2..0] : summator;:mult;
%подсоединен тактовый сигнал%
SUMMER[2..0].takt =
TAKT;.takt = TAKT;
%блок домножения входного отсчета на
коэффициент 0,280448%
.vhod[7..0] = VHOD[7..0];
%блок суммирования для n-1 отсчета%
SUMMER[0].a[7..0] =
VHOD[7..0];[0].b[7..0] = VHOD[7..0];[1].a[7..0] = VHOD[7..0];[1].b[7..0] =
MULTI.vihod[7..0];[2].a[7..0] = SUMMER[0].sum[7..0];[2].b[7..0] =
SUMMER[1].sum[7..0];
VIHOD[7..0] = SUMMER[2].sum[7..0];;
*************************************************************
%программа сумматор для двух
восьмибитных чисел%
SUBDESIGN summator
(
a[7..0],b[7..0] :
INPUT = GND;: INPUT;[7..0] : OUTPUT;
)[7..1]:node;[7..0]:
dff;:dff;[7..0].clk = takt;[7..0].prn = VCC;[7..0].clrn =
VCC;.clk=takt;.prn=VCC;(a[0]&b[0])==VCC
then[0]=GND;[1]=VCC;(a[0]#b[0])==GND
then[0]=GND;[1]=GND;sum[0]=VCC;[1]=GND;if;i in 1 to 6
generate(a[i]&b[i]&c[i])==VCC
then[i]=VCC;[i+1]=VCC;(a[i]#b[i]#c[i])==GND then[i]=GND;[i+1]=GND;
(((a[i]&b[i])#(a[i]&c[i])#(b[i]&c[i]))&!(a[i]&b[i]&c[i]))==VCC
then[i]=GND;[i+1]=VCC;sum[i]=VCC;[i+1]=GND;if
;generate;(a[7]&b[7]&c[7])==VCC then[7]=VCC;=VCC;(a[7]#b[7]#c[7])==GND then[7]=GND;=GND;(((a[7]&b[7])#(a[7]&c[7])#(b[7]&c[7]))&!(a[7]&b[7]&c[7]))==VCC
then[7]=GND;=VCC;sum[7]=VCC;=GND;if;;
*************************************************************
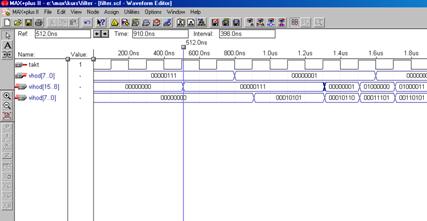
Правильность работы программы можно проверить по временным диаграммам.
Время работы программы 3 тактовых импульса. Поэтому тактовая частота должна
быть 45 кГц, что вполне реализуемо, если учесть, что границы тактовых частот
для ПЛИС семейства FLEX10K исчисляются МГц.
EFP10K10LC84-3
Список
использованных источников
Литература
1. Гольденберш
Л.М., Матюшкин Б.Д., Поляк М.Н. «Цифровая обработка сигналов», Москва, «Радио и
связь», 1990г.
2. Капеллини
В., Константинидис А.Дж., Эмилиани П. «Цифровые фильтры и их применение»,
Москва, «Энергоатомиздат», 1983г.
. Потемкин
В.Г. «Вычисления в среде MathLab»,
Москва, «Диалог мифи», 2004г.
. Стешенко
В.Б. «ПЛИС фирмы ALTERA: элементная
база, система проектирования и языки описания аппаратуры», Москва, издательский
дом «Додэка-21», 2002г.
Internet
1. Сайт фирмы Analog Device
Программное
обеспечение
1. Программный пакет MathLab
2. Программный пакет MAX+plus2