Разработка динамической модели привода с фрикционным вариатором
Донецкий национальный
технический университет
Квалификационная
работа
На тему:
Разработка динамической
модели привода с фрикционным вариатором
Выполнил:
Студент гр.
МС-03н: Касатка П.О.
Руководитель:
Деркач О.В.
Консультант: Горобець
I.О.
ДОНЕЦЬК 2007
РЕФЕРАТ
Бакалаврская
работа: 38 страниц, 15 рисунков, 1 приложение, 1 таблица, 5 источников.
В данной
бакалаврской работе необходимо разработать динамическую модель привода,
содержащего фрикционный вариатор; составить дифференциальные уравнения, которые
описывают динамические процессы в приводе.
Объект
исследования: привод с фрикционным вариатором.
Цель работы:
необходимо разработать динамическую модель привода, содержащего фрикционный
вариатор, с помощью программного пакета MatLab Sіmulіnk, для обеспечения
необходимых параметров переходного процесса.
ФРИКЦИОННЫЙ ВАРИАТОР,
ПЕРЕХОДНЫЙ ПРОЦЕСС, ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ, ДИНАМИЧЕСКАЯ МОДЕЛЬ,
ГЕОМЕТРИЧЕСКОЕ СКОЛЬЖЕНИЕ, МОМЕНТ ИНЕРЦИИ
Содержание
Введение
1 Общие сведения о фрикционных вариаторах
2 Исходные данные
3 Проектный расчет фрикционного
вариатора по контактным напряжениям
4 Разработка динамической модели
4.1 Структурная схема объекта и процесса в нем
4.2 Анализ допущений и факторов, принимаемых при
создании модели
4.3 Динамическая модель
4.4 Определение инерционных характеристик
подвижных деталей и жесткости элементов привода
4.5 Реализация динамической модели в Simulink
5 Анализ динамических процессов в объекте
5.1 Анализ динамических процессов во временной
области
5.2 Представление динамической модели в
пространстве состояний
5.3 Проектирование модального регулятора
Заключение
Перечень ссылок
Приложение
Вступление
Большинство
современных машин и установок создается по схеме: двигатель – передача –
рабочий орган (исполнительный механизм). Необходимость введения передачи как
промежуточного звена между двигателем и рабочими органами машины связано с
решением задачи повышения производительности, т.е. увеличения их быстродействия.
Время
срабатывания фрикционной передачи входит в общее время рабочего цикла машины,
следовательно, влияет на производительность машины в целом. Проблема повышения
производительности непосредственно связана с разработкой методов динамического
исследования машин и выбора их оптимальных параметров и структуры.
С помощью
динамической модели производится анализ системы, без участия реального объекта
и на ее основе можно построить систему управления объектом, и пронаблюдать
поведение системы управления и объекта.
1 Общие сведения о
фрикционных вариаторах
Фрикционной
называют передачу, работа которой основана на использовании сил трения,
возникающих в месте контакта двух тел вращения под действием сжимающей силы Q.
Фрикционные
передачи вращательного движения можно разделить на две основные группы:
передачи нерегулируемые, т.е. с условно постоянным передаточным отношением, и
передачи регулируемые, позволяющие плавно изменять передаточное отношение
(бесступенчатое регулирование) (рис. 1.1).
Одной из
наиболее простых и во многих случаях достаточно надёжной является фрикционная
передача, состоящая в простейшем случае из двух колёс (катков), закреплённых на
ведущем и ведомом валах. Для передачи движения без скольжения необходимо
приложить к одному из колёс силу Q, достаточную для возникновения трения в
месте контакта, при этом касательная сила их сцепления равна по величине
передаваемого окружному усилию [1].
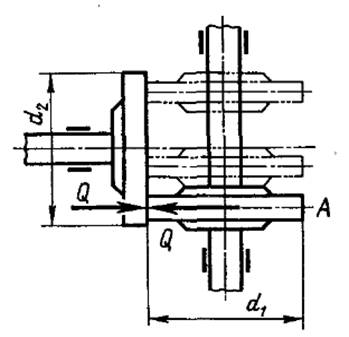
Рисунок 1.1 – Лобовой фрикционный
вариатор
Достоинствами
фрикционных передач являются: плавность и бесшумность в работе, простота
конструкции, невозможность поломки при резком изменении крутящего момента на
одном из валов благодаря возможности проскальзывания катков, возможность
бесступенчатого регулирования скоростей на ходу, без остановки передачи.
Недостатками
являются: необходимость прижимного устройства, большие давления на валы и опоры
от действия внешней силы прижимного устройства, что увеличивает их размеры и
делает передачу громоздкой, а также ограничивает величину передаваемой
мощности; непостоянство передаточного отношения из-за проскальзывания катков;
сравнительно высокий износ.
Фрикционные
вариаторы применяют как в кинематических, так и силовых передачах в тех
случаях, когда требуется бесступенчатое регулирование скорости (зубчатая
передача не позволяет такого регулирования). Фрикционные вариаторы используются
станкостроении, в литейных машинах, подъемных и транспортных машинах, приводах
летательных аппаратов и металлорежущих станках, роботах и манипуляторах,
цифровых следящих системах, механизмах для сельского хозяйства и других
изделиях.
Значение
фрикционных вариаторов как бесступенчатых регуляторов скорости возрастает в
связи с широким фронтом работ по автоматизации управления производственными
процессами.
Один из
катков фрикционного вариатора изготовляют из качественных сталей (40, 50, ШХ15
и т.д.), а другой – из серого чугуна, текстолита, фибры и других пластмасс.
Из всех типов
фрикционных бесступенчатых передач с твердыми телами касания лобовые фрикционные
вариаторы конструктивно наиболее просты. В таком вариаторе возможно перемещать
колесо по валу в направлениях, указанных стрелками, при этом передаточное
отношение будет плавно меняться в соответствии с изменением рабочего диаметра
диска.
Геометрическое
скольжение вариатора определяют по формуле:
знак «+» -
для ведущего колеса, знак «-» - для ведущего диска (рис 1.2 а и б),
где  - радиус диска, при
- радиус диска, при  скольжение максимальное;
скольжение максимальное;
b – ширина диска.
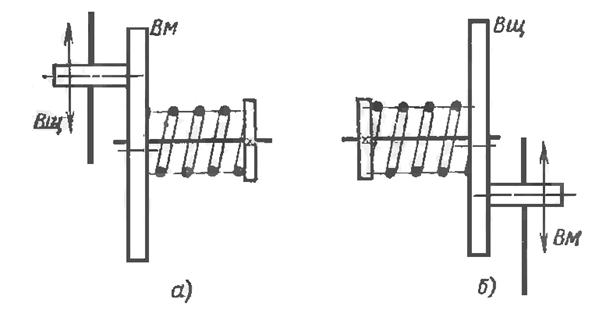
Рисунок 1.2 – Лобовой фрикционный
вариатор:
а) с ведущим колесом; б)
с ведущим диском
Основной
недостаток лобовых вариаторов – большое геометрическое скольжение, поэтому в
силовых передачах их диапазон регулирования передаточного отношения приходится
ограничивать  .
.
При ведущем
колесе его радиус определяют по формуле:
 ;
;
где  .
.
При проектном
расчете принимают:
 - коэффициент запаса
сцепления;
- коэффициент запаса
сцепления;


 - минимальный рабочий радиус
диска.
- минимальный рабочий радиус
диска.
Рабочие
поверхности стальных фрикционных колес выполняются шлифованными с
шероховатостью Ra 0,63 ... 0,32 мкм.
Соединение
дисков с валами рекомендуется осуществлять шариковыми или винтовыми нажимными
устройствами (рис. 1.3).
Во избежание
чрезмерного скольжения центральную часть диска использовать не следует.
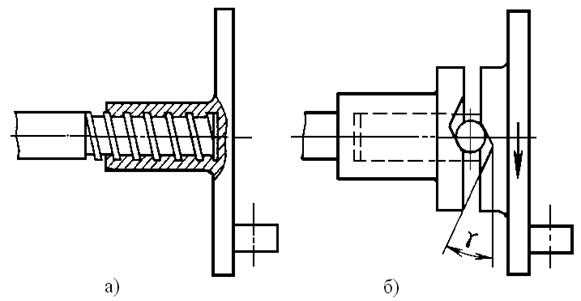
Рисунок 1.3 – Нажимные
устройства: а) винтовое; б) шариковое
2 Исходные данные
Рассчитаем лобовую фрикционную передачу для привода ленточного
конвейера при условии, что ведущее колесо передает мощность Р = 2 кВт при угловой
скорости ω1 =90 рад/с ведомому колесу,
вращающемуся с угловой скоростью ω2max = 45 рад/с [2].
В качестве прижимного устройства выбираем винтовое прижимное
устройство, обеспечивающее постоянную силу прижатия.
Назначаем материалы колес: меньшего — текстолит ПТК, а большего —
сталь 45.
Принимаем диапазон
регулирования передаточного отношения 

Тогда,
Передаточное отношение определяем по формуле:
Крутящий момент Мn, передаваемый ведущим колесом
Для передачи заданной мощности, выраженной окружной силой  необходимо обеспечить
условие
необходимо обеспечить
условие  где
где  — сила трения между катками.
— сила трения между катками.
Тогда
где β – коэффициент запаса сцепления колес, β=1,3.
Момент трения определяем по формуле:

3 Проектный расчет фрикционного вариатора
по контактным напряжениям
Определим диаметр d1 меньшего колеса из условия
контактной прочности. Принимаем коэффициент запаса сцепления колес β=1,3;
коэффициент трения по длине контактной линии f=0,3; допускаемое контактное
напряжение (текстолит по стали) [σ]k = 70 Н/мм2,
модуль упругости для меньшего колеса (текстолит) Е1=6х103
МПа, для большего колеса (сталь) Е2 = 2,15х105 МПа.
Приведенный модуль упругости Е по формуле:

Диапазон регулирования:
где  .
.
При проектном
расчете принимают 
Конструктивно наибольший диаметр диска:
Геометрическое скольжение при ведущем колесе:

Остальные
размеры колес принимают конструктивно.
4 Разработка динамической
модели
4.1 Структурная схема
объекта
Рассматриваемая
система состоит из электродвигателя, который создает момент двигателя Мn,
муфты, ведущего колеса, ведомого диска, подшипников качения и рабочего органа.
Двигатель создает крутящий момент с угловой скоростью ω, который передается через
муфту на ведущее колесо, с него на ведомый диск, затем на рабочий орган (рис.
3.1). Винтовое прижимное устройство обеспечивает передачу крутящего момента.
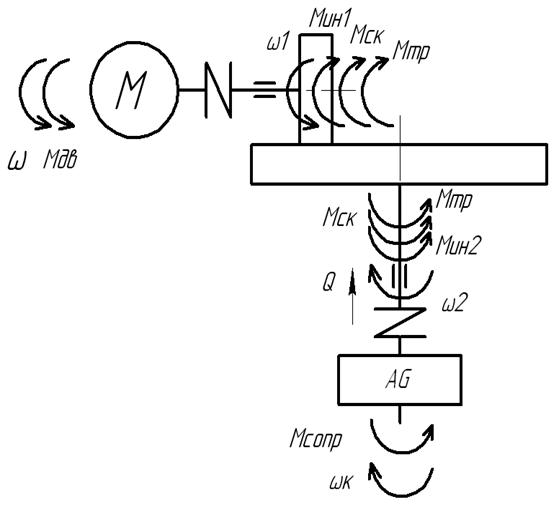
Рисунок 4.1 – Расчетная схема
привода.
4.2 Анализ допущений,
принимаемых при создании модели
Для создания
модели принимаем электродвигатель, обеспечивающий постоянный крутящий момент,
муфты с η =0,98, шариковые подшипники качения с η=0,99 и роликовые
подшипники качения с η=0,97. Деформации колеса и диска не учитываются.
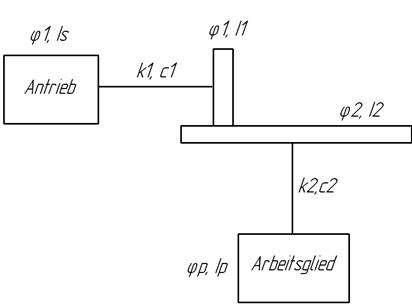
Рисунок 4.2 – Модель лобовой
передачи
4.3 Динамическая модель
Модель имеет
4 степени свободы и движение тел, входящих в модель, описывается системой
дифференциальных уравнений, на основании результатов решения которой получим
динамические параметры привода. Система дифференциальных уравнений имеет вид
[3]:
где Is,
Ip – приведенные моменты инерции вращающихся деталей двигателя и
рабочего органа;
I1,
I2 – приведенные моменты инерции колеса и диска соответственно;
φs,
φp, φi – угловые координаты вращающихся масс;
Мn
– момент движущих сил (двигателя);
Мо
– момент сил сопротивления (рабочего органа);
с1,
с2 – жесткости валов;
k1,
k2 – коэффициенты демпфирования;
ε –
геометрическое скольжение.
На основании
дифференциальных уравнений, которые описывают поведение привода в процессе
работы, была составлена его динамическая модель. Далее выполняем исследование
составленной модели. Нагружаем модель единичным ступенчатым воздействием,
которое воздействует на вал двигателя.
4.4 Определение
инерционных характеристик подвижных
деталей и жесткости
элементов привода
Моменты
инерции вращающихся звеньев определяются расчетным путем [4]. Приведенный
момент инерции вращающихся деталей двигателя:

где


Приведенный
момент инерции вращающихся деталей рабочего органа:

где
Приведенный момент
инерции колеса:

где


Приведенный
момент инерции диска:

где



Рассчитаем
жесткости валов:

где  - модуль упругости 2-го рода
(сдвига),
- модуль упругости 2-го рода
(сдвига),

Жесткость шлицевого
вала:
Жесткость винта:
4.5 Реализация
динамической модели в Simulink
На основе системы дифференциальных уравнений (п. 4.3) с помощью
интерактивной системы Simulink для моделирования нелинейных динамических систем
составим схему динамической модели привода с фрикционным вариатором (рис. 4.3).
Обозначения переменных, используемых в схеме динамической модели приведены в
таблице 4.1.
Таблица 4.1 - Обозначения переменных,
используемых
в динамической модели
|
Описание переменной
|
Обозначение
|
Схема
|
Ед.
|
|
Приведенный момент инерции вращающихся деталей
двигателя
|
Is
|
Is
|
кг*м2
|
|
Приведенный момент инерции вращающихся деталей
рабочего органа
|
Ip
|
Ip
|
кг*м2
|
|
Приведенный момент инерции колеса
|
I1
|
I1
|
кг*м2
|
|
Приведенный момент инерции диска
|
I2
|
I2
|
кг*м2
|
|
Угловые координаты вращающихся масс
|
φs, φp, φi
|
-
|
рад
|
|
Момент движущих сил (двигателя)
|
Мn
|
Mn
|
Н*м
|
|
Момент сил сопротивления (рабочего органа);
|
Мо
|
Мо
|
Н*м
|
|
Жесткость шлицевого вала
|
с1
|
с1
|
Н/м
|
|
Жесткость винта
|
с2
|
с2
|
Н/м
|
|
Коэффициент демпфирования
|
k1
|
k1
|
-
|
|
Коэффициент демпфирования
|
k2
|
k2
|
|
Коэффициент запаса сцепления колес
|
β
|
b
|
-
|
|
Геометрическое скольжение
|
ε
|
е
|
-
|

Рисунок 4.3 – Реализация
динамической модели в Simulink
Исходные
данные:
Is=1.3545;
Ip=1.6205;
I1=4.6934;
I2=262.0864;
c1=3163;
c2=3500;
Mn=22.2;
Mo=15;
e=0.08;
k1=0.7;
k2=0.7;
b=1,3.
5 Анализ динамических
процессов в объекте
5.1 Анализ динамических
процессов во временной области
Из анализа
графиков видно, что из-за инерционных свойств объектов,
из-за упругих
свойств, геометрического скольжения и силы трения разгон системы происходит
замедленно. Перемещение диска в период первой секунды приложения крутящего
момента вал двигателя, практически равно нулю (рис. 5.1–5.4).
Это
обусловлено упругими свойствами вала и винта и инерционными свойствами колеса и
диска, поэтому в момент пуска происходит задержка вращения, затем при
преодолении крутящим моментом момента проскальзывания происходит вращение
диска.
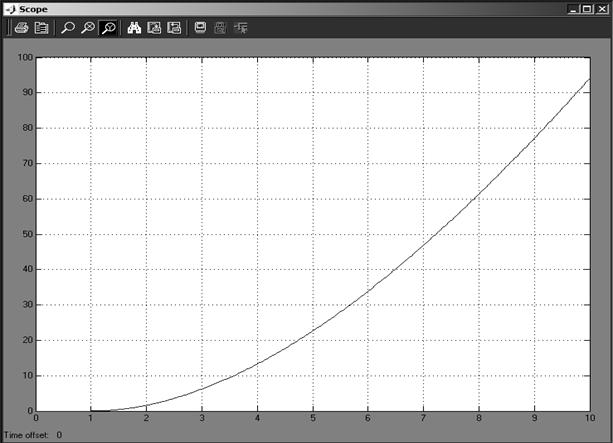
Рисунок 5.1 – Зависимость
угла поворота вала двигателя (рад) от времени (с)

Рисунок 5.2 – Зависимость
угла поворота колеса (рад) от времени (с)
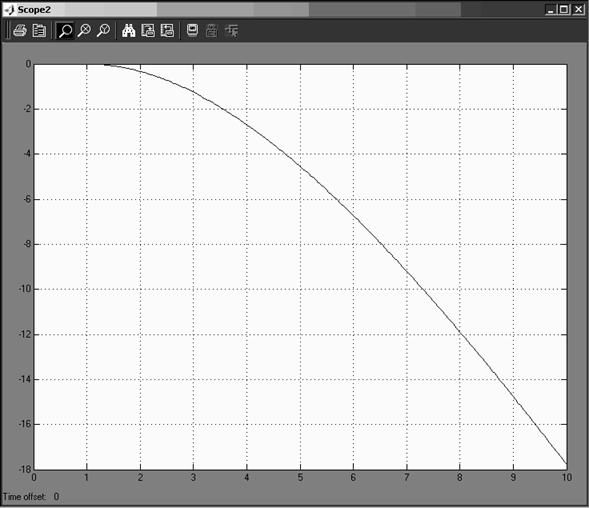
Рисунок 5.3 – Зависимость
угла поворота диска (рад) от времени (с)
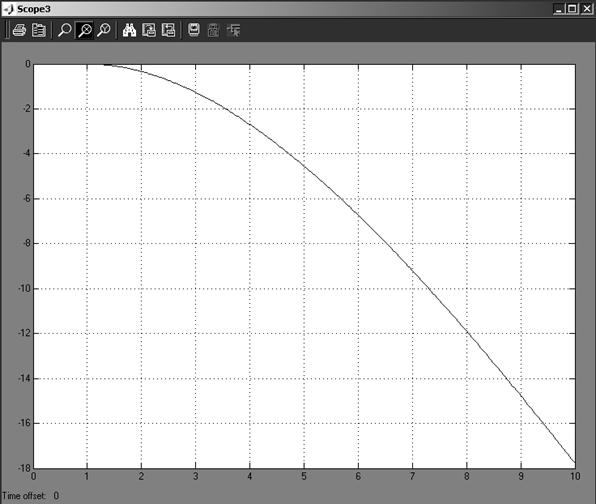
Рисунок 5.4 – Зависимость
угла поворота рабочего органа (рад) от времени (с)
5.2 Представление
динамической модели
в пространстве состояний
Динамическая
модель, описанная дифференциальными уравнениями, может быть представлена в
форме матричных уравнений (матрицы А, В, С, D) или представлена в виде
передаточной функции. Так как модель имеет 4 степени свободы, то преобразование
Лапласа необходимое для получения передаточной функции произвести достаточно
трудно. Поэтому представим модель в форме матриц, используя для их расчета интерактивную
систему MATLAB.
Дифференциальные
уравнения динамической модели:
Преобразуем
систему.
Представим
модель в матричной форме:
Введем
следующие обозначения:
Динамическая
модель принимает вид:

Умножим обе
части уравнения на обратную матрицу  :
:

Обратную
матрицу с помощью
MATLAB:
L=[Is
0 0 0; 0 I1 0 0; 0 0 I2 0; 0 0 0 Ip];
inv(L)
ans =
0.7383 0 0 0
0 0.2131 0 0
0 0 0.0038 0
0 0 0 0.6171.
Умножим
обратную матрицу на
матрицу  :
:
F=[-k1
k1 0 0; 0 -k1 k1 0; 0 k2 -k2 0; 0 0 k2 -k2];
ans
=
-0.7000
0.7000 0 0
0
-0.7000 0.7000 0
0
0.7000 -0.7000 0
0
0 0.7000 -0.7000
ans=inv(L)*F
ans
=
0 -0.1491 0.1491
0
0 0.0027 -0.0027
0
0 0 0.4320 -0.4320
Умножим
обратную матрицу на
матрицу  :
:
R=[-c1
c1 0 0;c1 -c1 0 0; 0 0 -c2 c2; 0 0 c2 -c2];
ans=R
-3163
3163 0 0
3163
-3163 0 0
0 0
-3500 3500
0 0
3500 -3500
ans=inv(L)*R
ans
=
1.0e+003 *
-2.3352 2.3352
0 0
0.6739 -0.6739
0 0
0 0 -0.0134 0.0134
0 0 2.1598 -2.1598
Умножим
обратную матрицу на
матрицу  :
:
К=[Mn; -(e-b)*Mn;
-(b-e)*Mn; -Mo];
ans=K
22.2000
27.0840
-27.0840
-15.0000
ans=inv(L)*К
16.3898
5.7707
-0.1033
-9.2564
Матрицы А, В,
С, D имеют вид:
Введем
полученные матрицы в M-file MATLAB и получим передаточную функцию динамической
модели, которая описывает реакцию модели на скачкообразное задающее воздействие
(рис. 5.5, 5.6).
A=[0 0 0 0 1 0
0 0;
0 0 0 0 0 1 0
0;
0 0 0 0 0 0 1
0;
0 0 0 0 0 0 0
1;
-2335.2 2335.2
0 0 -0.5168 0.5168 0 0;
673.9 -673.9 0
0 0 -0.1491 0.1491 0;
0 0 13.4 13.4
0 0.0027 -0.0027 0;
0 0 2159.8 -2159.8
0 0 0.4320 -0.4320];
B=[0; 0; 0;
0; 16.3898; 5.7707; -0.1033; -9.2564];
C=[1 0]; D=[0].
Передаточная
функция имеет вид:
W(s)
= (-2.132e-014 s^7 + 16.39 s^6 + 6.586 s^5 + 3.275e004 s^4 - 2343 s^3-
6.166e006s^2 - 7.573e004 s + 1.407e008)/(s^8 + 1.101 s^7 + 5156 s^6 + 3080 s^5
+ 6.401e006 s^4 + 6.915e005 s^3 - 1.742e008 s^2 - 2.015e007 s + 2.25e-007).
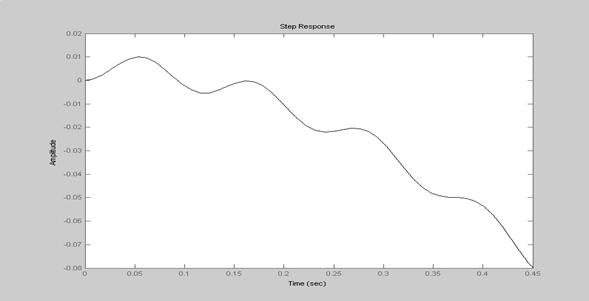
Рисунок 5.5 – Переходной
процесс в динамической модели
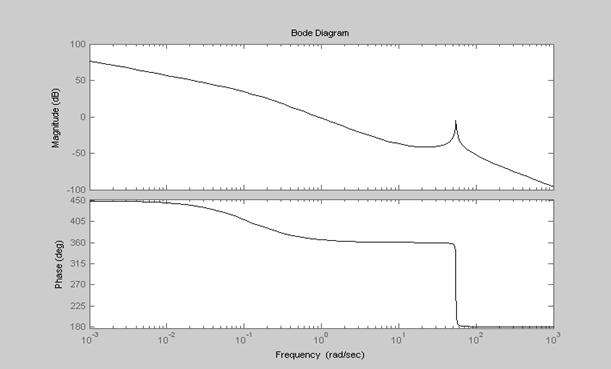
Рисунок 5.6 –
Амплитудно-фазо-частотная и фазо-частотная характеристики
Из анализа
графиков видно, что колебания в модели возрастают и она не устойчива. Поэтому
необходимо спроектировать регулятор (корректирующее звено) (рис. 5.7), чтобы
динамическая модель имела затухающие колебания при переходном процессе и малое
время успокоения (1-5 секунд) с перерегулированием не более 10-15%.
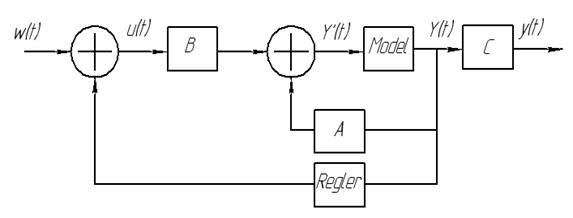
Рисунок 5.7 –
Динамическая модель с модальным регулятором
5.4 Проектирование
модального регулятора
Идея создания
модального регулятора заключается в том, чтобы подобрать его коэффициенты так,
чтобы полюса замкнутого контура регулирования оказались в заштрихованной
области. Это обеспечит затухающие колебания при переходном процессе и малое
время успокоения с перерегулированием не более 10-15% (рис. 5.7).
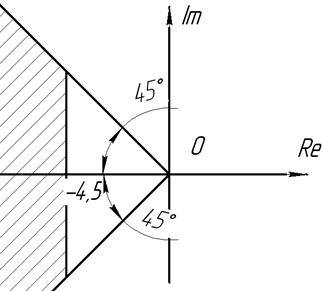
Рисунок 5.8 – Область
расположения полюсов устойчивых систем
Для
построения модального регулятора необходима проверка управляемости модели.
Проверку
управляемости произведем с помощью критерия Калмана:
если ранг
квадратной матрицы Ss(n,n)=[B A*B A2*B … An-1*B] равен
порядку матрицы n, то модель, описываемая матрицами А, В, С, D, является
управляемой. Порядок матрицы А динамической модели равен 8.
Ранг матрицы –
максимальный размер квадратной матрицы, определитель которой не равен нулю.
Ранг матрицы
можно определить с помощью функции rank в MATLAB:
Ss=ctrb(A,B);
rank(Ss);
ans=8.
Ранг матрицы
А динамической модели равен порядку, значит модель управляема.
Методом
подбора назначаем полюса для новой передаточной функции замкнутого контура. С
помощью MATLAB можно найти коэффициенты модального регулятора и получить
переходной процесс в динамической модели с регулятором (рис. 5.9).
p=[-7-0.2i
-7+0.2i -5-0.5i -5+0.5i -5 -6 -17 -10];
k=place(A,B,p);
sysE=ss(A-B*k,B,C,D);
step(sysE)
k=[-237.0116 237.0565
173.5746 -185.8740 8.6474 -8.5860 16.0462 14.2642].
Из анализа
графика на рисунке 5.7 видно, что переходной процесс в системе заканчивается
через 2,5 секунды без перерегулирования.
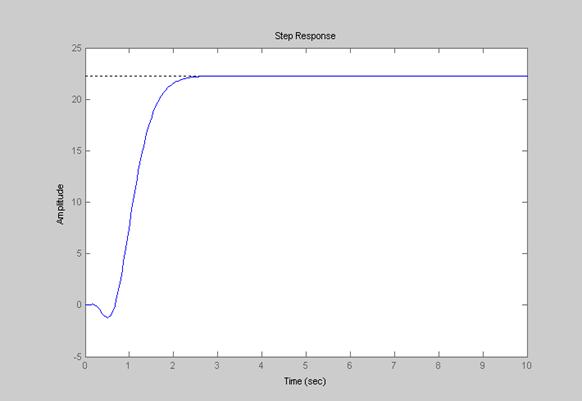
Рисунок 5.9 – Переходной
процесс в динамической модели c регулятором
Заключение
В данной
работе были изучены динамические процессы, возникающие в приводе с фрикционным
вариатором. Выбраны исходные данные, приведен проектный расчет фрикционного
вариатора, определены инерционные характеристики подвижных деталей и жесткости
элементов привода.
Была
составлена структурная схема объекта исследования, математическое описание и
динамическая модель, позволяющие изучить возможное поведение системы при
действии на неё единичной нагрузки.
Также
приведен анализ динамических процессов в объекте во временной области и
пространстве состояний. Спроектирован модальный регулятор, который обеспечивает
завершение переходного процесса в динамической модели за 2,5 секунды.
Литература
1. Гузенков П.Г. Детали машин: Учеб. для вузов. –
М.: Высш. шк., 1986. – 359 с.
2. Бакаев Н.А., Волошина О.Н. Основы
проектирования фрикционных передач. – Издательство Ростовского университета,
1985. – 176 с.
3. Пронин Б.А., Ревков Г.А. Бесступенчатые
клиноременные и фрикционные передачи. – М.: Машиностроение, 1980. – 320 с.
4. Комаров М.С. Динамика механизмов и
машин. Машиностроение, М., 1969.
5. Иванов Е.А. Муфты
приводов. Машгиз, М, 1959.