Основы робототехники
Промышленный робот
- автоматическая машина, состоящая из манипулятора и устройства программного
управления его движением, предназначенная для замены человека при выполнении
основных и вспомогательных операций в производственных процессах.
Манипулятор
- совокупность пространственного рычажного механизма и системы приводов,
осуществляющая под управлением программируемого автоматического устройства или
человека-оператора действия (манипуляции), аналогичные действиям руки человека.
Назначение и область
применения
Промышленные роботы
предназначены для замены человека при выполнении основных и вспомогательных
технологических операций в процессе промышленного производства. При этом решается
важная социальная задача - освобождения человека от работ, связанных с
опасностями для здоровья или с тяжелым физическим трудом, а также от простых
монотонных операций, не требующих высокой квалификации. Гибкие
автоматизированные производства, создаваемые на базе промышленных роботов,
позволяют решать задачи автоматизации на предприятиях с широкой номенклатурой
продукции при мелкосерийном и штучном производстве. Копирующие манипуляторы,
управляемые человеком-оператором, необходимы при выполнении различных работ с
радиоактивными материалами. Кроме того, эти устройства незаменимы при
выполнении работ в космосе, под водой, в химически активных средах. Таким
образом, промышленные роботы и копирующие манипуляторы являются важными
составными частями современного промышленного производства. Также они
используются в лесной промышленности для погрузки и разгрузки пачек деревьев.
Основные понятия и
определения. Структура манипуляторов
Формула строения
- математическая запись структурной схемы манипулятора, содержащая информацию о
числе его подвижностей, виде кинематических пар и их ориентации относительно
осей базовой системы координат (системы, связанной с неподвижным звеном).
Движения, которые
обеспечиваются манипулятором, делятся на:
·
глобальные (для роботов с
подвижным основанием) - движения стойки манипулятора, которые существенно
превышают размеры механизма;
·
региональные (транспортные) -
движения, обеспечиваемые первыми тремя звеньями манипулятора или его
"рукой", величина которых сопоставима с размерами механизма;
·
локальные (ориентирующие) -
движения, обеспечиваемые звеньями манипулятора, которые образуют его
"кисть", величина которых значительно меньше размеров механизма.
В соответствии с этой
классификацией движений, в манипуляторе можно выделить два участка
кинематической цепи с различными функциями: механизм руки и механизм кисти. Под
"рукой" понимают ту часть манипулятора, которая обеспечивает
перемещение центра захвата - точки М (региональные движения захвата); под
"кистью" - те звенья и пары, которые обеспечивают ориентацию захвата
(локальные движения захвата).
Рассмотрим структурную
схему антропоморфного манипулятора, то есть схему которая в первом приближении
соответствует механизму руки человека (рис.1)
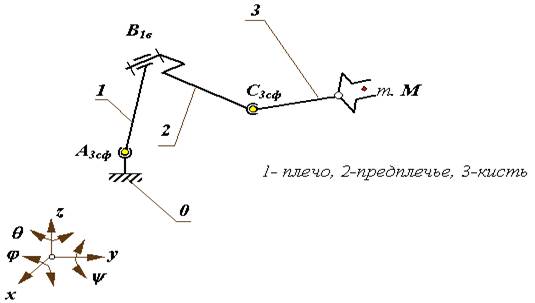
Рисунок 1. Схема
манипулятора.
Этот механизм состоит
из трех подвижных звеньев и трех кинематических пар: двух трехподвижных
сферических А3сф и С3сф и одной одноподвижной
вращательной В1в.
Рабочее пространство
манипулятора - часть пространства, ограниченная
поверхностями огибающими к множеству возможных положений его звеньев.
Зона обслуживания
манипулятора - часть пространства соответствующая
множеству возможных положений центра схвата манипулятора. Зона обслуживания
является важной характеристикой манипулятора. Она определяется структурой и
системой координат руки манипулятора, а также конструктивными ограничениями
наложенными относительные перемещения звеньев в КП.
Подвижность
манипулятора W - число независимых обобщенных координат
однозначно определяющее положение захвата в пространстве:

или для незамкнутых
кинематических цепей:
Маневренность
манипулятора М - подвижность манипулятора при
зафиксированном (неподвижном) захвате:

Структура
кинематической цепи манипулятора должна обеспечивать требуемое перемещение
объекта в пространстве с заданной ориентацией. Для этого необходимо, чтобы
схват манипулятора имел возможность выпонять движения минимум по шести
координатам: трем линейным и трем угловым. Рассмотрим на объекте
манипулирования точку М, которая совпадает с центром схвата. Положение объекта
в неподвижной (базовой) системе координат 0x0y0z0
определяется радиусом-вектором точки М и ориентацией единичного вектора с
началом в этой точке. В математике положение точки в пространстве задается в
одной из трех систем координат:
·
прямоугольной
декартовой с координатами xM, yM, zM;
·
цилиндрической
с координатами rsM, j M, zM;
·
сферической
с координатами rM, j M, q M.
Ориентация объекта в
пространстве задается углами a, b и g, которые вектор ориентации образует с
осями базовой системы координат. На рис. 2 дана схема шести подвижного
манипулятора с вращательными кинематическими парами с координатами объекта
манипулирования.
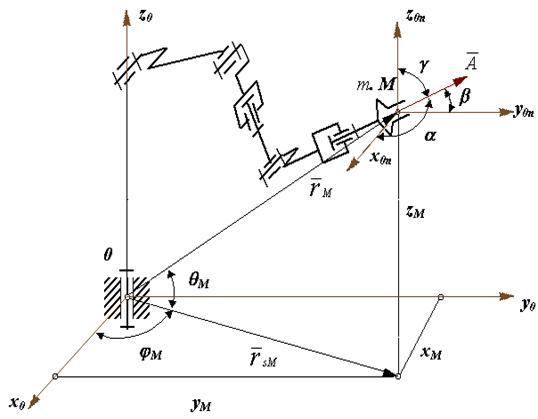
Рисунок 2. Схема шести
подвижного манипулятора с вращательными кинематическими парами с координатами
объекта манипулирования.
При структурном синтезе
механизма манипулятора необходимо учитывать следующее:
·
кинематические
пары манипуляторов снабжаются приводами, включающими двигатели и тормозные
устройства, поэтому в схемах манипуляторов обычно используются одноподвижные
кинематические пары: вращательные или поступательные;
·
необходимо
обеспечить не только заданную подвижность свата манипулятора, но и такую
ориентацию осей кинематических пар, которая обеспечивала необходимую форму зоны
обслуживания, а также простоту и удобство программирования его движений;
·
при
выборе ориентации кинематических пар необходимо учитывать расположение приводов
(на основании или на подвижных звеньях), а также способ уравновешивания сил
веса звеньев.
Задачи механики
манипуляторов
К основным задачам
механики манипуляторов можно отнести:
·
разработку
методов синтеза и анализа исполнительных механизмов (включая механизмы
приводов);
·
программирование
движения манипулятора;
·
расчет
управляющих усилий и реакций в КП;
·
уравновешивание
механизмов манипуляторов;
·
другие
задачи.
Кинематический анализ
механизма манипулятора
Первая и основная
задача кинематики - определение функции положения. Для
пространственных механизмов наиболее эффективными методами решения этой задачи
являются векторный метод и метод преобразования координат. При решении прямой
задачи о положении захвата манипулятора обычно используют метод преобразования
координат. Из множества методов преобразования координат [ 1, 2 ] , которые
отличаются друг от друга правилами выбора осей локальных систем координат, для
манипуляторов обычно используется метод Денавита и Хартенберга.
Опишем два вида матриц:
·
матрицы
М, определяющие отношение между системами координат соседних звеньев;
·
матрицы
Т, определяющие положение и ориентацию каждого звена механизма в
неподвижной или базовой системе координат.
Воспользуемся
однородными координатами трехмерного проективного пространства РR3,
в которых движение евклидова пространства R3 можно
представить линейным преобразованием:
где: Мij -
матрица 4x4 вида
 Это
преобразование эквивалентно преобразованию в эвклидовом пространстве где .То есть
преобра-зованию, которое включает поворот, определяемый матрицей Uij
размерностью 3х3, и параллельный перенос, задаваемый вектором размерностью 3. В
однородном пространстве положение точки будут определять не три x, y и z, а
четыре величины x', y', z' и t', которые
удовлетворяют следующим соотношениям:
Это
преобразование эквивалентно преобразованию в эвклидовом пространстве где .То есть
преобра-зованию, которое включает поворот, определяемый матрицей Uij
размерностью 3х3, и параллельный перенос, задаваемый вектором размерностью 3. В
однородном пространстве положение точки будут определять не три x, y и z, а
четыре величины x', y', z' и t', которые
удовлетворяют следующим соотношениям:
x
= x'/t', y = y'/t', z = z'/t'.
Обычно принимают t'=1.
У матрицы поворота Uij элементами uij являются
направляющие косинусы углов между новой осью i и старой осью j. Вектор  -
трехмерный вектор, определяющий положение начала новой системы координат i в
старой системе j. Выбор расположения осей должен соответствовать
решаемой задаче. При решении задачи о положениях необходимо: в прямой задаче
определить положение выходного звена как функцию перемещений в приводах, в
обратной - заданное положение выходного звена представить как функцию
перемещений в приводах. Выбор расположения и ориентации локальных систем координат
должен обеспечивать выполнение этих задач. При использовании метода Денавита и
Хартенберга оси координат располагаются по следующим правилам:
-
трехмерный вектор, определяющий положение начала новой системы координат i в
старой системе j. Выбор расположения осей должен соответствовать
решаемой задаче. При решении задачи о положениях необходимо: в прямой задаче
определить положение выходного звена как функцию перемещений в приводах, в
обратной - заданное положение выходного звена представить как функцию
перемещений в приводах. Выбор расположения и ориентации локальных систем координат
должен обеспечивать выполнение этих задач. При использовании метода Денавита и
Хартенберга оси координат располагаются по следующим правилам:
1.
Для
звена i ось zi направляется по оси кинематической
пары, образуемой им со звеном (i+1). Начало координат размещают в
геометрическом центре этой пары.
2.
Ось
xi направляется по общему перпендикуляру к осям zi-1
и zi с направлением от zi-1 к
zi. Если оси zi-1 и zi
совпадают, то xi перпендикулярна к ним и направлена
произвольно. Если они пересекаются в центре кинематической пары, то начало
координат располагается в точке пересечения, а ось xi
направляется по правилу векторного произведения  (кратчайший поворот оси zi до
совмещения с zi-1 при наблюдении с конца xi
должен происходить против часовой стрелки).
(кратчайший поворот оси zi до
совмещения с zi-1 при наблюдении с конца xi
должен происходить против часовой стрелки).
3.
Ось
yi направляется так, чтобы система координат была правой.
В прямой задаче
необходимо определить положение схвата манипулятора и связанной с ним системы
координат Mxnynzn по отношению к
неподвижной или базовой системе координат Kx0y0z0.
Это осуществляется последовательными переходами из системы координат звена i
в систему координат звена i-1. Согласно принятому методу, каждый
переход включает в себя последовательность четырех движений: двух поворотов и
двух параллельных переносов, осуществляемых в указанной последовательности
(рис. 3):
·
поворот
i-ой системы вокруг оси xi на угол -qi до
параллельности осей zi и zi-1 (положительное
направление поворота при наблюдении с конца вектора xi против
часовой стрелки);
·
перенос
вдоль оси xi на величину -ai до совмещения
начала системы координат Oi с точкой пересечения осей xi
и zi-1 (отсчет по оси xi от точки пересечения оси xi
и оси zi-1);
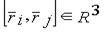
Рисунок 3. Схема
манипулятора перехода из звена i в i-1.
·
поворот
вокруг оси zi-1 на угол -ji, до тех пор пока ось xi не
станет параллельной оси xi-1 (положительное направление поворота при
наблюдении с конца вектора zi-1 против часовой стрелки).
Необходимо отметить,
что знак угла поворота не имеет значения, так как в матрицах перехода
используются направляющие косинусы (четные функции). Целесообразно
рассматривать угол, обеспечивающий кратчайший поворот оси старой системы i
до совмещения (параллельности) с соответствующей осью новой (i-1).
Перемещения начала координат определяются как координаты начала старой системы
Oi в новой Oi-1.
В манипуляторах обычно
используются одноподвижные кинематические пары или вращательные, или
поступательные. Оба относительных движения как вращательное, так и
поступательное, реализуются в цилиндрических парах. Поэтому при общем
представлении механизма используются (рис. 3) цилиндрические пары.
Матрицы перехода их
системы Oi в систему Oi-1 можно записать
так:

где:
-
матрица поворота вокруг
оси xi
на угол -qi,
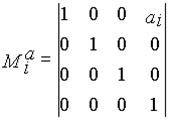
-матрица переноса
вдоль оси xi на -ai,
-матрица переноса
вдоль оси zi-1 на -si,
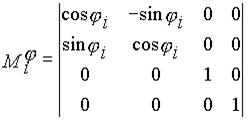
- матрица поворота
вокруг оси zi-1 на уг угол -ji.
В этих матрицах
переменные si и ji соответствуют
относительным перемещениям звеньев в кинематических парах и являются
обобщенными координатами манипулятора, определяющими конфигурацию механизма в
рассматриваемом положении. Переменные ai и qi
определяются конструктивным исполнением звеньев манипулятора, в процессе
движения они остаются неизменными.
Положение некоторой
произвольной точки М в системе координат звена i определяется
вектором rMi, а в системе координат звена (i-1)
- вектором rMi-1. Эти радиусы связаны между собой через
матрицу преобразования координат Мi следующим уравнением:
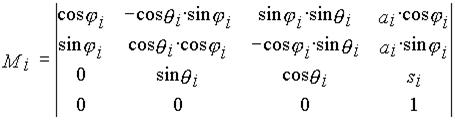 где:
где:
Точность манипуляторов
ПР
Точность манипуляторов
определяется погрешностями позиционирования характеристической точки захвата
(точка М) и погрешностями угловой ориентации захвата. Погрешности
позиционирования определяются технологическими отклонениями размеров звеньев
манипулятора, зазорами в кинематических парах манипулятора и механизмов
приводов, деформациями (упругими и температурными) звеньев, а также
погрешностями системы управления и датчиков обратной связи. В паспортных данных
манипуляторов указывается максимально допустимое отклонение центра захвата
манипулятора точки М от ее номинального расположения на множестве
возможных конфигураций механизма. В результате погрешностей точка М
описывает в пространстве некоторый эллипсоид, который называется эллипсоидом
отклонений (рис. 4).
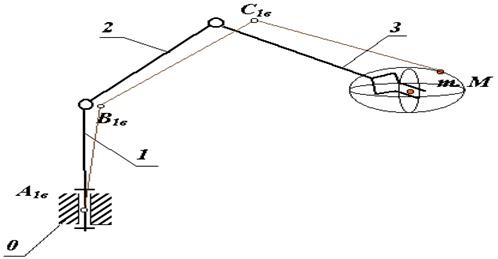
Рисунок 4. Схема
манипулятора в пространстве.