Устройства контроля деталей и состояния режущего инструмента на станке
Устройства контроля деталей и состояния режущего инструмента на станке
Состав
технических устройств контроля
Технические устройства контроля ГПС в общем
случае включают:
• информационные устройства, представляющие собой
первичные измерительные преобразователи (датчики) для сбора информации о
свойствах, техническом состоянии и пространственном положении контролируемых
объектов, а также о состоянии технологической среды;
• промежуточные преобразователи, приборы или
вычислительные устройства, осуществляющие анализ полученной информации и
сравнение полученных фактических значений параметров с заданными;
• управляющие вычислительные устройства,
вырабатывающие сигналы оповещения, индикации или управления, необходимые для
своевременного введения коррекции или принятия других мер.
Устройства
контроля деталей и состояния режущего инструмента на станке
Широко применяемым методом контроля в процессе
резания является метод непрерывного или через короткие промежутки времени (для
каждой детали) измерения текущих параметров приводных электродвигателей.
Измерительные преобразователи, устанавливаемые на электродвигателях,
регистрируют изменения тока нагрузки и через аналого-цифровой преобразователь
передают информацию для обработки в микро-ЭВМ.
Наиболее распространенные методы контроля
процесса обработки делятся на три группы: по силовым параметрам, акустическим
показателям и уровню вибраций.
Косвенное измерение сил резания производится
посредством измерения деформаций под действием усилий (тензометрическими,
индуктивными датчиками) или ускорений. В связи с этим выявляется величина
износа, выкрашивание режущего инструмента, несоблюдение размера из-за отжима
инструмента и т.д.
Акустический метод контроля основан на явлении
акустической эмиссии, т.е. высокочастотных колебаний или волн напряжений,
возникающих при деформации металла. Для регистрации таких колебаний используют
пьезоэлектрические датчики. Между звуком, генерируемым режущим инструментом, и
состоянием его режущей кромки существует определенное соотношение, так как
характер звука зависит от степени износа инструмента.
По изменению вибраций при резании обнаруживаются
изнашивание, резонансные колебания инструмента и его поломка. В качестве
датчика вибраций используют пьезоэлектрический акселерометр.
Наиболее распространенными средствами прямого
контроля с высокой точностью заготовок, деталей и инструмента вне процесса
обработки являются датчики (индикаторы) касания (щупы).
Датчик касания состоит из корпуса и
контактного щупа. При нажиме на щуп в любом направлении происходит срабатывание
конечного выключателя, расположенного в корпусе. Корпус датчика касания может
быть закреплен в шпинделе, на станине станка или в другом месте. При
срабатывании конечного выключателя датчика касания от него поступает сигнал в
УЧПУ станка, который является командой для определения текущих координат
подвижных узлов. Если датчик съемный, то перемещение сигнала от него
выполняется бесконтактно. Когда измерения не производятся, датчик автоматически
помещается в инструментальный магазин. Приемник сигнала датчика остается на
корпусе станка.
Измерительная щуповая головка с датчиком касания БВ-4271
(рис. 1) содержит щуп 1, который установлен в корпусе 2 а шарнирной
подвеске 3 так, чтобы при смещении в направлении любой из трехкоординатных осей
осуществлять размыкание или замыкание электрических контактов 4. Питание
щуповой головки, используемой при изменении детали, осуществляется
бесконтактным способом посредством трансформатора 5 с воз душным зазором. Связь
щуповой головки с электронным блоком выполняется при помощи приемно-передающего
устройства 6 оптического типа, основанного на передаче светодиодом сигнала в
момент контакта щупа с измеряемым изделием. Приемник сигнала, выполненный на
базе фототранзисторов, установлен в электронном блоке.
На рисунке 2 показана конструкция измерительной
щуповой головки для контроля размеров обрабатываемой на станке ИР320ПМФ4
корпусной детали. Головка I с оптическим передающим устройством 2 автоматически
устанавливается в шпинделе 3 станка из магазина, где она хранится вместе со
сменными режущими инструментами. Приемное устройство 4 установлено в
определенном положении на переднем торце шпиндельной бабки так, чтобы отверстие
в кожухе 5 совпадало с осью светоизлучателя датчика 2. Положение
фототранзисторов приемного устройства 4 вдоль оси регулируется шпильками 6.
На рисунке 3 показана конструкция измерительной
щуповой головки выдвижного типа, предназначенной для контроля размеров
инструментов в сменном диске рревольверной головки токарного станка с ЧПУ
ИРТ180ПМФ4. Щуповая головка скреплена на штанге 2, выдвигаемой из внутренней
защитной гильзы 3 при помощи ггидроцилиндра 4. Связь измерительной головки с
приемным устройством осуществляется кабелем, проходящим внутри штанги 2. Гильза
с измерительной головкой вместе с гидроцилиндром и штангой смонтированы на
передней стенке шпиндельной бабки станка так, чтобы ось выдвижения головки была
параллельна оси шпинделя. Механизм выдвижения должен обеспечивать высокую
стабильность позиционирования щупа в рабочем (выдвинутом) положении.
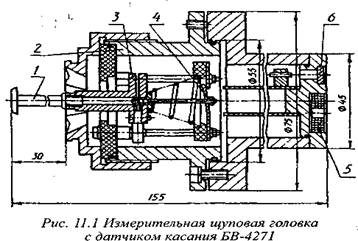
Рис. 1
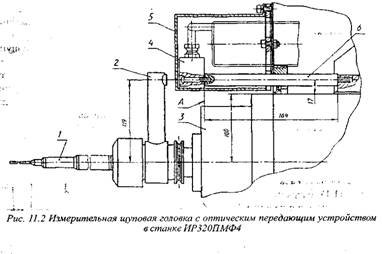
Рис. 2
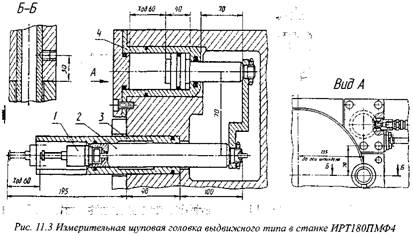
Рис. 3
Для автоматического контроля размеров сложных
изделий (корпусных деталей) используются специализированные
контрольно-измерительные модули, оснащенные универсальными измерительными
машинами. На рисунке 4 показан общий вид координатной измерительной машины КИМ-600.
Машина предназначена для измерения различных деталей абсолютным методом в
линейных (X, Y, Z) и угловых (С) координатах, характеризующих геометрические
параметры: размеры, форму и взаимное расположение поверхностей детали путем
обхода ее по запрограммированной траектории. Отсчет размеров в контрольных
точках выполняется при помощи контактной щуповой головки и измерительных
приборах с последующей обработкой результата.
КИМ-600 состоит из измерительной станции 1,
несущей щуповую головку 2 для измерения координат контрольных точек детали.
Деталь устанавливается на рабочей поверхности поворотного стола 3, необходимого
для измерения углового положения С.
Обработка измерительной информации выполняется
электронным устройством 4 со встроенной микро-ЭВМ 5. Результаты обработки
передаются на печатающее устройство 6 и монитор 7, установленное на тумбах 8. В
стойке 9 хранятся инструменты для оператора и приспособления к машине.
Измерительная станция представляет собой
портальную конструкцию, несущую подвижную (ось X) каретку 1 с контактной
(щуповой) головкой 2 в шпинделе 10. Направляющие 11 каретки установлены на
портале 12, который, в свою очередь, перемещается по направляющим 13,
закрепленным на основании 14. На поверхности основания крепится поворотный стол
3. Основание машины установлено на тумбе 75 и регулируется по высоте при помощи
винтовых опор 16, три из которых служат для установки поверхности основания в
горизонтальной плоскости, а четыре других являются поддерживающими. В тумбе
размещен блок подготовки воздуха, пневмоаппаратура и панель с электрическими
разъемами и пультом оператора. Тумба устанавливается на полу на
виброизолирующих опорах 17.
Из зарубежных устройств наиболее известны
швейцарские измерительные машины SIP302M для контроля резьбообразующего
инструмента, щупов электронных измерительных устройств, индикаторов и различных
деталей в диапазоне
Центр для измерения инструмента SIP305M предназначен
также для контроля резьбообразующих инструментов, индикаторов, калибров, щупов
и различных деталей.
Универсальная измерительная машина SIP414M предназначена
для контроля самых разнообразных деталей по трем осям (X, Y, Z) с пределами
измерений соответственно 400x100x145 мм. Рабочая поверхность стола 520x200 мм,
разрешающая способность измерительной системы 0,1 мкм.
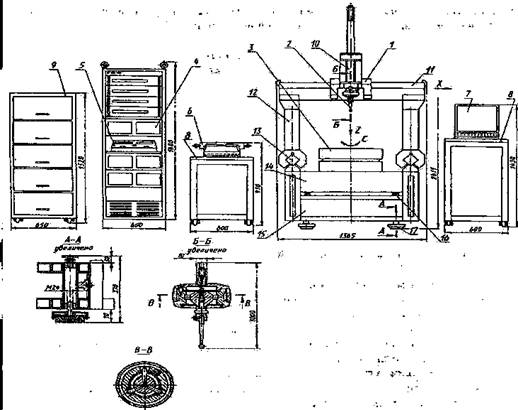
Рис. 4 Общий вид координатно-измерительной
машины КИМ-600
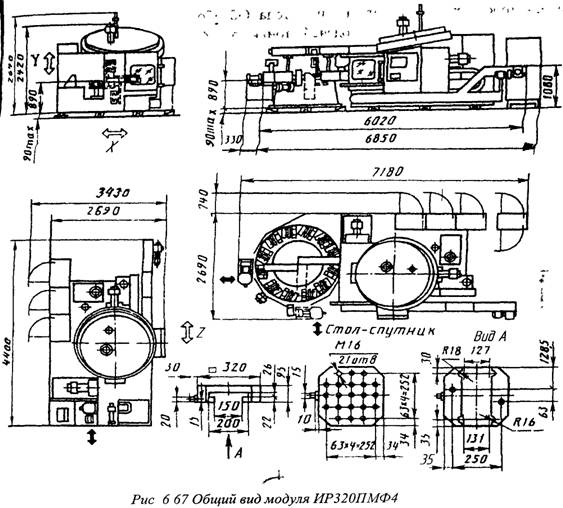
Рис. 16
Список литературы
1. Харченко А.О. Станки
с ЧПУ и оборудование гибких производственных систем: Учебное пособие для
студентов вузов. – К.: ИД «Профессионал», 2004. – 304 с.
2. Р.И. Гжиров, П.П. Серебреницкий.
Программирование обработки на станках с ЧПУ. Справочник, – Л.: Машиностроение,
1990. – 592 с.