Механизм поперечно-строгального станка
Кафедра
«Основы проектирования машин»
Тема
Механизм
поперечно-строгального станка
Содержание
1 СИНТЕЗ РЫЧАЖНОГО МЕХАНИЗМА
1.1 Структурный анализ механизма
1.2 Определение недостающих размеров
1.3 Определение скоростей точек механизма
1.4Определение ускорений точек механизма
1.5 Диаграмма движения выходного звена
1.6 Определение угловых скоростей и ускорений
1.7 Определение ускорений центров масс звеньев механизма
1.8 Аналитический метод расчёта
2 СИЛОВОЙ АНАЛИЗ РЫЧАЖНОГО МЕХАНИЗМА
2.1 Определение сил инерции
2.2 Расчёт диады 4-5
2.3 Расчёт диады 2-3
2.4 Расчет кривошипа
2.5 Определение уравновешенной силы методом Жуковского
2.6 Определение мощностей
2.7 Определение кинетической энергии и приведённого момента инерции механизма
3 ГЕОМЕТРИЧЕСКИЙ РАСЧЁТ ЗУБЧАТОЙ ПЕРЕДАЧИ, ПРОЕКТИРОВАНИЕ ПЛАНЕТАРНОГО
МЕХАНИЗМА
3.1 Геометрический расчёт зубчатой передачи
3.2 Определение передаточного отношения планетарной ступени и подбор чисел
зубьев колёс
3.3 Определение частот вращения зубчатых колёс аналитическим методом
4 СИНТЕЗ И АНАЛИЗ КУЛАЧКОВОГО МЕХАНИЗМА
4.1 Построение кинематических диаграмм и определение масштабных коэффициентов
4.2 Построение профиля кулачка
4.3 Определение максимальной линейной скорости и ускорения толкателя
5 СПИСОК ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ
Введение
Поперечно-строгальный станок предназначен для строгания
плоских поверхностей.
Привод станка состоит из простой зубчатой передачи
и планетарной передачи, который соединен с электромотором.
Резание металла осуществляется резцом, установленным
в резцовой головке, закреплённой на ползунке, при рабочем ходе ползунка.
Кривошип жёстко соединен с зубчатым колесом. Во время
перебега в конце холостого хода осуществляется перемещение стола с заготовкой на
величину подачи с помощью храпового механизма и кулачкового механизма, кулачёк которого
жестко соединен с зубчатым колесом.
При проектировании профиля кулачка необходимо обеспечить
заданный закон движения толкателя.
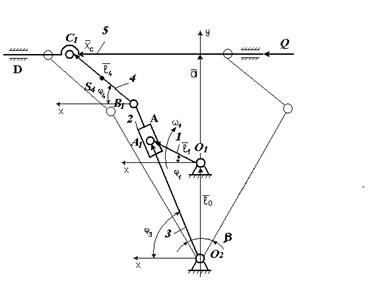
1 Синтез и анализ рычажного механизма
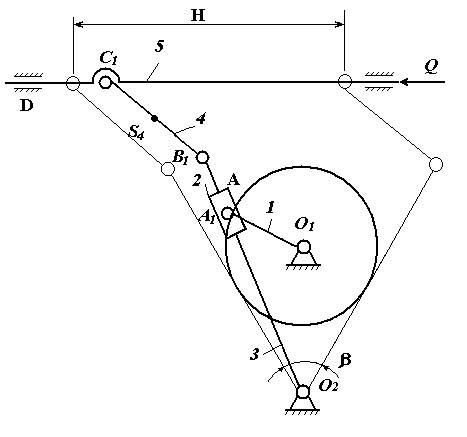
Исходные данные: lo1o2=460мм ; H=460мм ; nкр=70 мин-1 ; К=1,5;
1.1.
Структурный анализ механизма :
Степень подвижности механизма:
 ;
;
где к=5 – число подвижных звеньев,
p1=7 –
число одноподвижных кинематических пар,
p2=0 –
число двухподвижных кинематических пар.


Разложение механизма на структурные группы Асура
Формула строения механизма:
I(0;1)→ II2(2;3)→II2(4;5)
Механизм II класса ,
второго порядка.
1.2.
Определение недостающих размеров:
Угол размаха кулисы:

Длина кривошипа:


Длина кулисы:




Масштабный коэффициент построения схемы :

Строим 12 планов механизма , приняв за начало
отсчета крайнее положение, соответствующее началу рабочего хода механизма.
1.3 Определение скоростей точек механизма.
Скорость точки А кривошипа определяем по формуле :
 ,
,
где  , где nкр=70мин-1
, где nкр=70мин-1


Планы скоростей строим в масштабе :

Скорость точки А’ находим графически , решая
совместно систему :
На плане Рvа’=30мм
. Абсолютная величина скорости точки А’ :




Скорость точки В находим из соотношения :
 , откуда
, откуда 
Абсолютная величина скорости точки В :


Скорость точки С определим, решая совместно
систему :

На плане Рvс=34мм.
Абсолютная величина скорости точки С :


 , на плане
, на плане  =14мм
=14мм

Для всех остальных положений скорости определяем
аналогично.
Полученные результаты сводим в таблицу 1.1
Таблица 1.1.- Значения скоростей
|
Скоростим/с
|
Положения механизма
|
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
11
|
12
|
|
va
|
1.03
|
1,03
|
1,03
|
1,03
|
1,03
|
1,03
|
1,03
|
1,03
|
1,03
|
1,03
|
1,03
|
1,03
|
|
va’
|
0,6
|
1,02
|
1,2
|
1,26
|
1,1
|
0,7
|
0.16
|
0,56
|
1.1
|
1,24
|
0,64
|
1,32
|
|
vb
|
0,88
|
1,32
|
1,5
|
1,6
|
1,43
|
0,92
|
0,26
|
1,18
|
2,5
|
2,8
|
1,3
|
0
|
|
vc
|
0,68
|
1,24
|
1,5
|
1,6
|
1,48
|
0,92
|
0,32
|
1,4
|
2,54
|
2,8
|
1
|
0
|
1.4
Определение ускорений точек механизма.
Пересчетный коэффициент С :

Ускорение точки А конца кривошипа определяем по
формуле:

Ускорение аа направлено по кривошипу к
центру вращения О1.
Выбираем масштабный коэффициент ускорений:


На плане ускорений изображаем ускорение точки А
отрезком Раа=55мм
Ускорение точки А’ определяем, решая совместно
систему:

Кориолисово ускорение:
 ;
; 


По свойству подобия определяем ускорение точки В :
 ;
; 


Система уравнений для определения ускорений точки
С:
 , откуда
, откуда 





Ускорения всех точек найдены. Ускорения для
остальных положений механизма находим аналогично . Значения ускорений сводим в
таблицу
Таблица 1.2. – Значения ускорений
|
Ускорения м/с2
|
Положения механизма
|
|
1
|
3
|
5
|
7
|
9
|
11
|
12
|
|
аа
|
7,5
|
7,5
|
7,5
|
7,5
|
7,5
|
7,5
|
7,5
|
|
аА’
|
3,8
|
2,5
|
2,6
|
6,4
|
8,5
|
10,3
|
7,5
|
|
ab
|
5,7
|
3,4
|
3,8
|
10,5
|
19,3
|
21,4
|
11
|
|
ac
|
5,8
|
2,1
|
1,7
|
10,5
|
16,1
|
20,8
|
11,7
|
1.5 Диаграммы движения выходного звена.
Диаграмму перемещения строим , используя полученную
из S-t плана механизма
траекторию движения точки С.
Диаграммы скорости V-t и ускорений A-t
строим из полученных 12 планов скоростей и 7 планов ускорений.
Масштабные коэффициенты диаграмм:


 ,
,
где хt=180 мм



1.6
Определение угловых скоростей и ускорений
Угловые скорости и ускорения звеньев механизма
определяются для первого положения









1.7.
Определение ускорений центров масс звеньев механизма
Ускорение центров масс звеньев определяем из
планов ускорений:




1.8 Аналитический метод расчета

1.
Расчет ведется для первого положения кулисы:

2.
В проекциях на координатные оси:
3.
Поделим второе уравнение на первое:



4.
Передаточное отношение U31:

5.
Передаточная функция ускорений U’31:


6.
Угловая скорость кулисы:

7.
Угловое ускорение кулисы:

8.
Уравнение замкнутости верхнего контура в проекциях на оси:

 (1)
(1)
9.
Решая совместно два уравнения находим sinφ4:


10
. Дифференцируем уравнения (1) по параметру φ1:
 (2)
(2)
где  и
и  - соответствующие передаточные отношения.
- соответствующие передаточные отношения.
11.
Передаточное отношение U43 и угловая
скорость ω4:


12.
Передаточное отношение U53:

13.
Дифференцируем уравнение по параметру φ3:
 (3)
(3)
где  и
и 
14.
Из второго уравнения системы (3) определяем U’43:

15.
Из первого уравнения системы (3) находим U’53:


16.
Скорость и ускорение точки С выходного звена:



1.9 Расчет на ЭВМ
Program kulise1;
User crt;
Const
h=0.;
l0=0.456;
l1=0.143;
shag=30;
w1=7.33;
a=0.270;
var
f1, w3, e3, vb, ab, u53, u53_,
u31_:real;
cosf3, tgf3, sinf3: real;
begin
write (`,Введите угол в
градусах`);
read(f1);
repeat
w3:=w1*((sqr(l1)+l0*l1*sin(f1))/(sqr(l1)+sqr(l0)+2*l0*l1-*sin(f1)));
u31_;=l0*l1*cos(n)*(sqr(l0)-sqr(l1))/(sqr(sqr(l1)+sqr(l0)+2*l0*l1*sin(f1)));
E3:=sqr(w1)*u31_;
cosf3:=sqrt((sqr(l1)*sqr(cos(f1)))/(sqr(l1)+sqr(l0)+2*l0*l1*sin(f1)));
tgf3:=(l0+l1*sin(f1))/(l1*cos(f1));
sinf3:=tgf3/sqrt(1+sqr(tgf3));
u53:=-(a/(sqr(sinf3)));
u53_:=(2*a*cosf3)/(sqr(sinf3)*sinf3);
Ab:=sqr(w3)*u53_+E3*u53;
Writeln(`’Скорость Vb=`, Vb=`,Vb:3:4);
Writeln(`’Ускорение Ab=`, Ab=`,Vb:3:4);
Decay(10000)
Writein;
F1:=F1+Shag;
Until F1>=
End.
Скорости
|
Ускорения
|
|
0
|
0
|
76,6
|
|
1
|
35,963
|
49,8936
|
|
2
|
63,5161
|
30,9
|
|
3
|
80,1509
|
18,5649
|
|
4
|
86,5
|
0
|
|
5
|
85,3494
|
-7,3299
|
|
6
|
77,2378
|
-14,32
|
|
7
|
56,7787
|
-63,818
|
|
8
|
0
|
200,7
|
|
9
|
-132,198
|
-273,396
|
|
10
|
-260
|
0
|
|
11
|
-94,5398
|
272,2544
|
|
|
|
Планы скоростей и
ускорений:

Рис. 3 – Диаграмма
скоростей
Рис. 4 – Диаграмма
ускорений
2 Силовой анализ
механизма
Исходные данные:
вес кулисы  кг;
кг;
вес шатуна  кг;
кг;
вес ползуна  кг.
кг.
2.1 Силы тяжести и
силы инерции
Силы тяжести:
 Н
Н
 Н
Н
 Н
Н
Силы инерции:
 Н
Н
 Н
Н
 Н
Н

 Н м
Н м
 мм
мм
2.2 Расчет диады 4-5
Для расчета этой диады изобразим ее со всеми
приложенными к ней силами: силами тяжести, полезного сопротивления и реакциями.
Эти реакции в поступательных парах известны по
направлению, но неизвестны по модулю. Определяем с помощью плана сил. Составим
уравнение равновесия диады 4-5.
Строим план сил диады в масштабе сил
Уравнение содержит три неизвестных, поэтому
составляем дополнительное уравнение равновесия в форме моментов сил
относительно точки С.

Рассчитаем вектора сил
Строим план сил по уравнению сил, в том порядке
как силы стояли в уравнении.
Значения сил из плана сил
Для рассмотрения внутренних реакций в диаде 4-5
необходимо рассмотреть равновесие одного звена, звена 4.

2.3 Расчет диады 2-3
Изобразим диаду со всеми приложенными к ней
силами. В точках А и О2 взамен отброшенных связей прикладываем
реакции  и
и  . В точке В прикладываем
ранее найденную реакцию
. В точке В прикладываем
ранее найденную реакцию .
Составляем уравнение равновесия диады 2-3.
.
Составляем уравнение равновесия диады 2-3.

Плечи измеряем на плане. Теперь в уравнении сил
две неизвестных, поэтому строим план сил и определяем реакцию , как замыкающий вектор.
, как замыкающий вектор.
Строим план диады в масштабе сил  . Значения сил из плана сил.
. Значения сил из плана сил.


2.4 Расчет кривошипа
Изобразим кривошип с приложенными к нему силами и
уравновешивающей силой  ,
эквивалентной силе действия на кривошип со стороны двигателя. Действие
отброшенных связей учитываем вводя реакции
,
эквивалентной силе действия на кривошип со стороны двигателя. Действие
отброшенных связей учитываем вводя реакции  и
и  . Определяем уравновешивающую силу, считая, что
она приложена в точке А кривошипа, перпендикулярно ему. Составляем уравнение
равновесия кривошипа.
. Определяем уравновешивающую силу, считая, что
она приложена в точке А кривошипа, перпендикулярно ему. Составляем уравнение
равновесия кривошипа.
Значение силы определяем из плана сил.
2.5 Определение уравновешивающей силы методом
Жуковского
Строим повернутый на 900 план скоростей
и в соответствующих точках прикладываем все внешние силы, включая и силы инерции. Составим уравнение
моментов относительно точки  , считая неизвестной:
, считая неизвестной:

Подлинность графического метода:
2.6.
Определение мощностей
Потери мощности в кинематических парах:

Потери мощности на трение во вращательных парах:

где  - коэффициент
- коэффициент
 - реакция во вращательной паре,
- реакция во вращательной паре,
 - радиус цапф.
- радиус цапф.

Суммарная мощность трения

Мгновенно потребляемая мощность

Мощность привода, затрачиваемая на преодоление
полезной нагрузки.

2.7 Определение кинетической энергии механизма
Кинетическая энергия механизма равна сумме
кинетических энергий входящих в него массивных звеньев.
Приведенный момент инерции
3 Геометрический
расчёт эвольвентного зубчатого зацепления. Синтез планетарного редуктора
3.1 Геометрический
расчёт равносмещённого эвольвентного зубчатого зацепления
Исходные данные:
число зубьев
шестерни: Z =14
=14
число зубьев
колеса: Z =28
=28
модуль зубчатых
колёс: m=4мм
Нарезание зубчатых
колес производится инструментом реечного типа, имеющего параметры:
 - коэффициент высоты головки зуба
- коэффициент высоты головки зуба
 - коэффициент радиального зазора
- коэффициент радиального зазора
 - угол профиля зуба рейки
- угол профиля зуба рейки
Суммарное число
зубьев колёс:

 поэтому проектирую равносмещённое
зацепление.
поэтому проектирую равносмещённое
зацепление.
Делительно-межосевое
расстояние:
 мм
мм
Начальное межосевое
расстояние:  мм
мм
Угол зацепления: 
Высота зуба:
 мм
мм
Коэффициент
смещения:

Высота головки
зуба:
 мм
мм
 мм
мм
Высота ножки зуба:
 мм
мм
 мм
мм
Делительный
диаметр:
 мм
мм
 мм
мм
Основной диаметр:
 мм
мм
 мм
мм
Диаметры вершин:
 мм
мм
 мм
мм
Диаметр впадин:
 мм
мм
 мм
мм
Толщина зуба:
 мм
мм
 мм
мм
Делительный шаг:
 мм
мм
Основной шаг:
 мм
мм
Радиус галтели:
 мм
мм
Коэффициент
перекрытия:
Коэффициент
перекрытия, полученный аналитически:


Масштабный
коэффициент построения зацепления:
3.1.1 Расчёт
равносмещённого эвольвентного зубчатого зацепления на ЭВМ
Public Sub programma()
m = 4
Z1 = 14
Z2 = 28
ha = 1
c = 0.25
N = (20 * 3.14159) / 180
a = 0.5 * m * (Z1 + Z2)
h = 2.25 * m
x1 = (17 - Z1) / 17: x2 = -x1
ha1 = m * (ha + x1): ha2 = m * (ha + x2)
hf1 = m
* (ha + c - x1): hf2 = m * (ha + c - x2)
d1 = m *
Z1: d2 = m * Z2
db1 = d1
* Cos(N): db2 = d2 * Cos(N)
da1 = d1
+ 2 * ha1: da2 = d2 + 2 * ha2
df1 = d1
- 2 * hf1: df2 = d2 - 2 * hf2
S1 = 0.5
* 3.14159 * m + 2 * x1 * m * Tan(N): S2 = 0.5 * 3.14159 * m + 2 * x2 * m *
Tan(N)
P =
3.14149 * m
Pb = P *
Cos(N)
Rf =
0.38 * m
Worksheets(2).Cells(10,
2) = a
Worksheets(2).Cells(11,
2) = h
Worksheets(2).Cells(12,
2) = x1
Worksheets(2).Cells(12,
3) = x2
Worksheets(2).Cells(13,
2) = ha1
Worksheets(2).Cells(13,
3) = ha2
Worksheets(2).Cells(14,
2) = hf1
Worksheets(2).Cells(14,
3) = hf2
Worksheets(2).Cells(15,
2) = d1
Worksheets(2).Cells(15,
3) = d2
Worksheets(2).Cells(16,
2) = db1
Worksheets(2).Cells(16,
3) = db2
Worksheets(2).Cells(17,
2) = da1
Worksheets(2).Cells(17,
3) = da2
Worksheets(2).Cells(18,
2) = df1
Worksheets(2).Cells(18,
3) = df2
Worksheets(2).Cells(19,
2) = S1
Worksheets(2).Cells(19,
3) = S2
Worksheets(2).Cells(20,
2) = P
Worksheets(2).Cells(21,
2) = Pb
Worksheets(2).Cells(22,
2) = Rf
End Sub
Таблица 3.1 – Параметры
зубчатой передачи на ЭВМ
|
Исходные данные:
|
|
Число зубьев шестерни:
|
Z1=14
|
|
Число зубьев колеса:
|
Z2=28
|
|
Модуль:
|
m=4
|
|
Коэффициент головки
зуба:
|
ha=1
|
|
Коэффициент радиального
зазора:
|
C=0,25
|
|
Угол профиля зуба
рейки:
|
α=20°
|
|
Результаты счёта:
|
|
Колесо
|
Шестерня
|
|
Межосевое расстояние:
|
84,000
|
|
Высота зуба:
|
13,500
|
|
Коэффициент смещения:
|
0,176
|
-0,176
|
|
Высота головки зуба:
|
3,312
|
4,688
|
|
Высота ножки зуба:
|
4,288
|
5,712
|
|
Делительный диаметр:
|
78,000
|
174,000
|
|
Основной диаметр:
|
52,636
|
105,267
|
|
Диаметр вершин:
|
65,424
|
118,576
|
|
Диаметр впадин:
|
47,324
|
100,676
|
|
Делительная толщина
зуба:
|
10,452
|
8,397
|
|
Делительный шаг:
|
12,564
|
|
Основной шаг:
|
11,788
|
|
Радиус кривизны
галтели:
|
1,521
|
|
|
|
|
3.2 Синтез
планетарного редуктора
Исходные данные:
Частота вращения
двигателя nдв=840 мин-1;
Частота вращения
кривошипа nкр=70 мин-1;
Число зубьев
шестерни z5=14;
Число зубьев колеса
z6=28;
Знак передаточного
отношения «- ;
Общее передаточное
отношение редуктора:

Передаточное
отношение простой передачи z5-z6:

Передаточное
отношение планетарной передачи:

Передаточное
отношение обращённого планетарного механизма – простого зубчатого ряда:

Формула Виллиса.
Передаточное отношение обращённого механизма:
Подбор чисел зубьев
планетарной передачи:

Условие соосности
для данной передачи:


Принимаем числа
зубьев колёс, равных: z1=24; z2=24; z3=48; z4=60.
По принятым числам
зубьев определяем диаметры колёс:






Принимаем
масштабный коэффициент построения кинематической схемы редуктора:
Скорость точки А
зубчатого колеса 1:

Строим планы
скоростей. Масштабный коэффициент плана скоростей:
Строим план частот
вращения звеньев редуктора. Масштабный коэффициент плана частот вращения звеньев
редуктора:
3.3 Определение
частот вращения зубчатых колёс аналитическим и графическим методом
Значения частот,
полученные аналитическим методом:




Значения частот,
полученных графическим методом:




Определяем
погрешность расчётов:

4 Синтез и анализ
кулачкового механизма
Исходные данные:
Максимальный подъём
толкателя h=20мм;
Рабочий угол
кулачка φр=280°;
Смещение оси
толкателя е=0;
Угол давления α=0;
Частота вращения
кривошипа nкр=70 мин-1;
число зубьев
шестерни:
число зубьев
колеса: 
4.1 Диаграмма
движения толкателя
По заданному графику
скорости толкателя v(t) графическим диффириенцированием по методу хорд
получаем ускорение толкателя а=f(t), а графическим интегрированием по методу хорд
получаем перемещения толкателя s=f(t).
Базы интегрирования
Н1=20мм; Н2=30 мм.
Графики υ(s), a(s), a(υ)
получаю методом исключения общего переменного параметра t.
Масштабные
коэффициенты диаграмм:
Масштабный
коэффициент перемещения:
Масштабный
коэффициент времени:


Масштабный
коэффициент скоростей:

Масштабный
коэффициент ускорений:

4.2 Выбор
минимального радиуса кулачка
Минимальный радиус
кулачка выбираю из условия выпуклости кулачка. Для этого необходимо, чтобы
минимальный радиус был больше ил равен максимальному значению аналога ускорения
в отрицательной части графика:

Где  считаем:
считаем:


4.3 Построение
профиля кулачка
Построение профиля
кулачка произвожу методом обращённого движения.
Масштабный
коэффициент построения:
В выбранном
масштабе строю окружность радиуса  . Откладываю фазовый рабочий угол
. Откладываю фазовый рабочий угол  . Делю этот угол на 13
частей. Через точки деления провожу оси толкателя в обращённом движении. Для
этого соединяю точку деления с центром вращения кулачка. Вдоль осей толкателя
от окружности минимального радиуса откладываю текущие перемещения толкателя в
выбранном масштабе. Через полученные точки провожу тарелки перпендикулярные
осям толкателя. Кривая, огибающая все положения тарелок, является профилем кулачка.
. Делю этот угол на 13
частей. Через точки деления провожу оси толкателя в обращённом движении. Для
этого соединяю точку деления с центром вращения кулачка. Вдоль осей толкателя
от окружности минимального радиуса откладываю текущие перемещения толкателя в
выбранном масштабе. Через полученные точки провожу тарелки перпендикулярные
осям толкателя. Кривая, огибающая все положения тарелок, является профилем кулачка.
4.4 Максимальное
значение скорости и ускорения толкателя


4.4.1 Расчёт
кулачка на ЭВМ
Public Sub kul()
Dim I As
Integer
Dim
dis1, dis2, R, a1, a2, arksin1, arksin2, BETTA, BET As Single
Dim R0,
FIR, FI0, FII, SHAG, E As Single
Dim S(1
To 36) As Single
R0 = InputBox("ВВЕДИТЕ МИНИМАЛЬНЫЙ РАДИУС КУЛАЧКА RO")
FIR = InputBox("ВВЕДИТЕ РАБОЧИЙ УГОЛ КУЛАЧКА FIR")
FI0 =
InputBox("ВВЕДИТЕ НАЧАЛЬНОЕ ЗНАЧЕНИЕ УГЛА ПОВОРОТА КУЛАЧКА FI0")
E =
InputBox("ВВЕДИТЕ ДЕЗАКСИАЛ E")
For I =
1 To 36
S(I) =
InputBox("ВВЕДИТЕ СТРОКУ ПЕРЕМЕЩЕНИЙ S(" & I & ")")
Next I
FIR =
FIR * 0.0174532
SHAG =
FIR / 13
FI0 =
FI0 * 0.0174532
FII =
FI0
For I =
1 To 36
dis1 =
(R0 ^ 2 - E ^ 2) ^ (1 / 2)
dis2 =
S(I) ^ 2 + R0 ^ 2 + 2 * S(I) * dis1
R = dis2
^ (1 / 2)
a1 = E /
R
a2 = E /
R0
arksin1
= Atn(a1 / (1 - a1 ^ 2) ^ (1 / 2))
arksin2
= Atn(a1 / (1 - a2 ^ 2) ^ (1 / 2))
BETTA =
FII + arksin1 - arksin2
BETTA =
BETTA * 180 / 3.1415
Worksheets(1).Cells(I,
1) = R
Worksheets(1).Cells(I,
2) = BETTA
FII =
FII + SHAG
Next I
End Sub
Таблица- Результаты
расчета
|
52
|
20,00048
|
|
60
|
40,00097
|
|
73
|
60,00145
|
|
86
|
80,00194
|
|
94
|
100,0024
|
|
98
|
120,0029
|
|
94
|
140,0034
|
|
86
|
160,0039
|
|
73
|
180,0044
|
|
60
|
200,0048
|
|
52
|
220,0053
|
|
48
|
240,0058
|
|
48
|
260,0063
|
|
48
|
280,0068
|
|
48
|
300,0073
|
|
48
|
320,0077
|
|
48
|
340,0082
|
|
48
|
360,0087
|

Рис.8 – График построения кулачка
Список используемых
источников
1 А. А. Машков, Теория механизмов и
машин. – Машиностроение, г. Москва, 1969г. – 583.
2 С. Н. Кожевников, Теория механизмов и
машин. – Машиностроение, г. Москва, 1969г. – 583с.
3 А. С. Кореняко, Курсовое проектирование
по теории механизмов и машин. Высшая школа, Киев, 1970г. – 330с.
4 И. П. Филонов, Теория механизмов и
машин и манипуляторов. – Дизайн ПРО, г. Минск, 1998г. – 428с.
5 И. И. Артоболевский, Теория механизмов
и машин. – Наука, г. Москва, 1998г. – 720с.
6 К. В. Фролов, Теория механизмов и
машин. – Высшая школа, г. Москва, 1998г. – 494с.