|
Время, с
|
I, А
|
ω, рад/с
|
|
0
|
-1607
|
59.46
|
|
0.06
|
-972
|
35.96
|
|
0.12
|
-498
|
18.42
|
|
0.18
|
-143
|
5.32
|
|
0.21
|
0
|
0
|
Рисунок 5.5 - Осциллограмма скорости при торможении
Рисунок 5.5 - Осциллограмма тока при торможении
 6
ПОСТРОЕНИЕ ЗАМКНУТОЙ СИСТЕМЫ АЭП
6
ПОСТРОЕНИЕ ЗАМКНУТОЙ СИСТЕМЫ АЭП
Принципиальная
схема двухконтурной АЭП с подчиненным регулированием параметров.
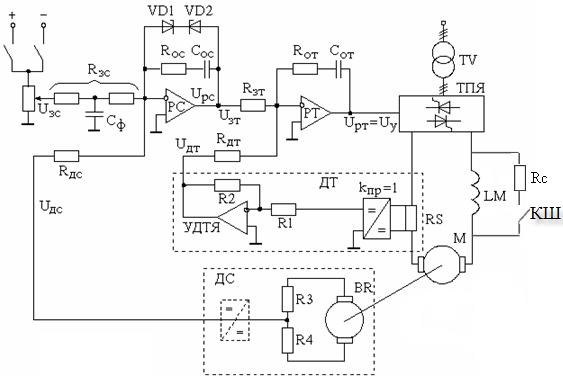
РС – регулятор
скорости;
ДС – датчик
скорости;
РТ – регулятор
тока;
ДТ – датчик
тока;
TV – трансформатор;
ТПЯ –
тиристорный преобразователь якоря;
RS – шунт в
контуре тока;
М – двигатель;
LM – обмотка
возбуждения;
BR – тахогенератор.
Рисунок
6.1 – Принципиальная схема
 6.1
Оптимизация контура тока
6.1
Оптимизация контура тока
Определим не
недостающие данные для расчета.
Индуктивное
сопротивление трансформатора, приведенное к цепи вторичной обмотки
 Ом. (6.1)
Ом. (6.1)
где
kсх2 = 0.815 – для
трехфазной мостовой схемы выпрямления.
Индуктивность
рассеяния трансформатора
 Гн. (6.2)
Гн. (6.2)
Индуктивность цепи
ТП – электродвигатель
 Гн. (6.3)
Гн. (6.3)
Максимальное
значение коэффициента усиления ТП в цепи якоря с СИФУ, выполненной по
вертикальному принципу управления с пилообразным опорным напряжением.
 , (6.4)
, (6.4)
где
Uоп – амплитуда
опорного напряжения в СИФУ, Uоп = 10 В.
Электромагнитная
постоянная времени цепи ТП – электродвигатель:
 с . (6.1.5)
с . (6.1.5)
Передаточный
коэффициент шунта в цепи якоря:
 Ом. (6.5)
Ом. (6.5)
Коэффициент
усилителя датчика тока якоря:
 . (6.6)
. (6.6)
Коэффициент
передачи усилителя датчика тока якоря:
 ,
(6.7)
,
(6.7)
где
UДТmax – максимально
допустимое значение напряжения на выходе датчика тока, UДТmax = 10 В.
Не
скомпенсированные постоянные времени контуров тока якоря и тока возбуждения
примем Тm = 0.005 с.
Передаточный
коэффициент тахогенератора:
 В/(рад/с). (6.8)
В/(рад/с). (6.8)
Оптимизацию
системы, построенной по принципу подчинённого регулирования, начинаем с
внутреннего контура тока якоря.
РТ
– регулятор тока;
ТП
– тиристорный преобразователь якоря двигателя;
ЯЦ
– якорная цепь двигателя;
ДТ
– датчик тока.
Рисунок 6.2 – Структурная схема контура
тока якоря
Оптимизацию
проводим при допущениях:
1)
датчик тока считаем без инерционным:
 . (6.9)
. (6.9)
2)
все малые инерционности, которые имеет контур, включены на входе ТП:
 . (6.10)
. (6.10)
3)
ЭД заторможен (Е = 0) или (DЕ »
0), а значит отсутствует ОС по ЭДС.
 Оптимизируем контур тока на модульный
оптимум
Оптимизируем контур тока на модульный
оптимум  , (6.11)
, (6.11)
тогда
 , (6.12)
, (6.12)
где
 .
(6.13)
.
(6.13)
Получили
пропорционально-интегральный регулятор (ПИ - регулятор) тока.
Передаточная
функция замкнутого контура тока имеет вид:
 . (6.14)
. (6.14)
Т.
к. величина Тm мала, то
слагаемым  можно пренебречь, тогда считаем
можно пренебречь, тогда считаем  , получаем:
, получаем:
 , (6.15)
, (6.15)
где
Тт = 2∙Тµ – эквивалентная постоянная времени
настроенного на модульный оптимум контура тока.
Структурная
схема замкнутого контура тока имеет вид:




Рисунок 6.3 – Структурная схема
замкнутого контура тока
 6.2 Расчёт параметров регулятора тока
6.2 Расчёт параметров регулятора тока
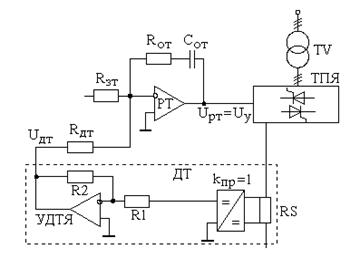
Рисунок 6.4 – Регулятор тока якоря
Коэффициент
регулятора тока:
 . (6.16)
. (6.16)
Задаемся
величиной ёмкости конденсатора в цепи обратной связи операционного усилителя
регулятора тока  Ф
Ф
Сопротивление
резистора в цепи обратной связи операционного усилителя регулятора тока:
Ом
. (6.17)
Сопротивление
в цепи датчика тока:
 Ом. (6.18)
Ом. (6.18)
Чтобы
в установившемся режиме сигнал РТ не изменялся, нужно, чтобы входной ток не
поступал в канал ОС.  , считаем
, считаем  .
.
 Ом. (6.19)
Ом. (6.19)
Принимаем
R1 = 5 кОм, тогда
 R2 = R1∙kудтя = 5∙74.07=370.4
кОм. (6.20)
R2 = R1∙kудтя = 5∙74.07=370.4
кОм. (6.20)
 6.3 Оптимизация контура
скорости
6.3 Оптимизация контура
скорости
ДС
– датчик скорости;
ЗКТ
– замкнутый контур скорости;
РС
– регулятор скорости;
ЭМ
– электромеханическая часть.
Рисунок 6.5 – Регулятор скорости
Допущение:
Ic = 0 (Х. Х.)
Настройку
произведем на симметричный оптимум.
 (6.21)
(6.21)
 ,
(6.22)
,
(6.22)
где
 (6.23)
(6.23)
Получили
пропорционально-интегральный регулятор (ПИ - регулятор) тока.
Передаточная
функция замкнутого контура скорости имеет вид:
(6.24)
где
Тс = 4Тт – эквивалентная
постоянная времени оптимизированного на
СО контура скорости.
 Данная
настройка имеет перерегулирование 43.3%, для устранения перерегулирования
необходимо ставить фильтр на входе регулятора. В результате передаточная
функция замкнутой системы имеет вид:
Данная
настройка имеет перерегулирование 43.3%, для устранения перерегулирования
необходимо ставить фильтр на входе регулятора. В результате передаточная
функция замкнутой системы имеет вид:
(6.25)
Структурная
схема замкнутого контура скорости имеет вид:
Рисунок 6.6 – Структурная схема
замкнутого контура скорости
6.4
Расчёт параметров регулятора скорости
Рисунок 6.4.1 – Регулятор скорости
Опередим
коэффициент датчика скорости:
 . (6.26)
. (6.26)
Коэффициент
регулятора скорости:
 . (6.27)
. (6.27)
Задаемся
величиной ёмкости конденсатора в цепи обратной связи операционного усилителя
регулятора с  Ф.
Ф.
 (6.28)
(6.28)
Сопротивление
резистора в цепи обратной связи операционного усилителя регулятора скорости:
Ом . (6.29)
Сопротивление в цепи датчика скорости:
 Ом. (6.30)
Ом. (6.30)
Чтобы
в установившемся режиме сигнал РС не изменялся, нужно, чтобы входной ток не
поступал в канал ОС.  , считаем
, считаем  .
.
 Ом. (6.31)
Ом. (6.31)
Определим
емкость фильтра на входе регулятора:
 . (6.32)
. (6.32)
Опередим
коэффициент делителя:
 . (6.33)
. (6.33)
Принимаем
R4 = 5 кОм, тогда
 кОм. (6.34)
кОм. (6.34)
 7 РАСЧЁТ СКОРОСТНЫХ ХАРАКТЕРИСТИК И ИХ
СТАТИЗМА В РАЗОМКНУТОЙ И ЗАМКНУТОЙ СИСТЕМЕ ЭЛЕКТРОПРИВОДА
7 РАСЧЁТ СКОРОСТНЫХ ХАРАКТЕРИСТИК И ИХ
СТАТИЗМА В РАЗОМКНУТОЙ И ЗАМКНУТОЙ СИСТЕМЕ ЭЛЕКТРОПРИВОДА
Выражение
для расчета механических характеристик имеет вид
 , (7.1)
, (7.1)
где
 – угловая скорость идеального холостого
хода, определена в (5.8)
– угловая скорость идеального холостого
хода, определена в (5.8)
Падение
скорости при номинальной нагрузке на естественной характеристике (ЕХ):
 рад/с. (7.3)
рад/с. (7.3)
Падение
скорости при номинальной нагрузке в разомкнутой системе (РС):
 рад/с. (7.4)
рад/с. (7.4)
Падение
скорости при номинальной нагрузке в замкнутой системе (ЗС):
 рад/с. (7.5)
рад/с. (7.5)
Рисунок 7.1 – Скоростные характеристики
электропривода
Статизм
естественной характеристики:
 . (7.6)
. (7.6)
Статизм
характеристики разомкнутой системы:
 . (7.7)
. (7.7)
Статизм
характеристики замкнутой системы:
 . (7.8)
. (7.8)
Из
механических характеристик видно, что жесткость замкнутой системы может изменяться
в пределах между жесткостями разомкнутой и замкнутой систем. Также видно, что
самая большая ошибка регулирования соответствует разомкнутой системе
регулирования.
 8 РАСЧЁТ ВЕЛИЧИНЫ ДИНАМИЧЕСКОГО ПАДЕНИЯ
СКОРОСТИ ДВИГАТЕЛЯ ПРИ НАБРОСЕ МОМЕНТА НАГРУЗКИ
8 РАСЧЁТ ВЕЛИЧИНЫ ДИНАМИЧЕСКОГО ПАДЕНИЯ
СКОРОСТИ ДВИГАТЕЛЯ ПРИ НАБРОСЕ МОМЕНТА НАГРУЗКИ
Рисунок
8.1 - Структурная схема контура скорости
Контур
скорости, оптимизированный на СО с фильтром на входе имеет быстродействие вдвое
меньшее, чем контур, оптимизированный на МО.
Данный
контур скорости является по заданию астатическим второго порядка (только при
наличии 2-й производной во входном сигнале появляется ошибка). Астатизм
достигнут за счет уменьшения быстродействия.
При
нелинейно изменяющемся входном сигнале задания на скорость на выходе регулятора
будет сигнал, полученный в результате интегрирования и запоминания интегральной
части регулятора. При появлении скоростной ошибки сигнал на выходе регулятора
скорости будет изменяться, что будет приводить к изменению сигнала задания на
ток и соответственно тока, что свидетельствует о переходных процессах в
приводе. Скоростная ошибка в этой системе по заданию возможна только в начале и
в конце отработки линейно изменяющегося сигнала задания.
Передаточная функция контура скорости по возмущению имеет вид:
 (8.1)
(8.1)
Определим
ошибку в установившемся режиме:
 (8.2)
(8.2)
Построим
кривую изменения скорости при набросе момента
Рисунок
8.2 - Изменения скорости при набросе момента
Благодаря
использованию ПИ – регулятора система стала астатичной.
 9 ОЦЕНКА ВЛИЯНИЯ ВНУТРЕННЕЙ ОБРАТНОЙ
СВЯЗИ ПО ЭДС
9 ОЦЕНКА ВЛИЯНИЯ ВНУТРЕННЕЙ ОБРАТНОЙ
СВЯЗИ ПО ЭДС
НА ПРОЦЕССЫ, ПРОТЕКАЮЩИЕ В КОНТУРЕ ТОКА
Рисунок 9.1 – Структурная схема контура
регулирования тока якоря с учетом действия внутренней обратной связи по ЭДС.
При
исследовании считаем, что нагрузки на валу нет, т.е. Ic = 0.
Передаточная
функция звена якорной цепи с учетом влияния внутренней обратной связи по ЭДС:
 .
(9.1)
.
(9.1)
Передаточная
функция звена якорной цепи в данном случае обладает дифференцирующими
свойствами, следовательно, компенсирует интегральные свойства регулятора.
Определяю
передаточную функцию разомкнутого контура тока с учетом действия внутренней
обратной связи по ЭДС и регулятором, рассчитанным на режим заторможенного
двигателя:
() (9.2)
 Передаточная функцию замкнутого контура
тока с учетом действия внутренней обратной связи по ЭДС:
Передаточная функцию замкнутого контура
тока с учетом действия внутренней обратной связи по ЭДС:
(9.3)
В установившемся режиме:
 . (9.4)
. (9.4)
В
контуре тока без учета действия внутренней обратной связи по ЭДС
Структурная
схема.
Рисунок
9.2 – Структурная схема
 , (9.5)
, (9.5)
где
 (9.6)
(9.6)
 . (9.7)
. (9.7)
Контур
тока, который с ПИ-регулятором был астатическим при заторможенном роторе,
становится статическим в переходном режиме (DЕ ¹ 0). Ошибка регулирования тем больше, чем меньше
постоянная времени Тм.
Другое следствие влияния ОС по ЭДС это увеличенное перерегулирование. По
отношению к новому установившемуся уровню тока перерегулирование увеличивается,
но по абсолютной величине остается тем же.
Если
ЭП имеет большую Тм,
то за время выхода тока на заданный уровень ЭДС электродвигателя практически не
меняется и ее влияние на ток минимально.
ЗАКЛЮЧЕНИЕ
 Входе выполнения данной работы был
произведен расчет тягового усилия, по результатам которого было определено,
что электропривод работает в двух зонах регулирования и произведен выбор электродвигателя:
ДК – 724С.
Входе выполнения данной работы был
произведен расчет тягового усилия, по результатам которого было определено,
что электропривод работает в двух зонах регулирования и произведен выбор электродвигателя:
ДК – 724С.
Выполнен расчёт
и выбор элементов силовой цепи электропривода: тахогенератор ТП32-16-2.5,
трансформатор ТС3-1000, тиристорный преобразователь ЭПУ оснащенный тиристором
Т253-1000. Так же была произведена разработка силовой схемы электропривода.
Произведен
расчет характеристик, обеспечивающих диаграмму моментов электропривода.
Построены динамические
характеристики привода в пуско – тормозных режимах.
Была
построена двухконтурная замкнутая система электропривода, в которой был
произведен расчет регуляторов для контура тока и контура скорости. Эти
регуляторы получились пропорционально интегральными. Был произведен расчёт
скоростных характеристик и их статизма в разомкнутой и замкнутой системе
электропривода, расчёт величины динамического падения скорости двигателя при
набросе момента нагрузки и произведена оценка влияния внутренней обратной связи
по ЭДС на процессы, протекающие в контуре тока.
Использование
замкнутой системы регулирования дало возможность управлять системой с заданными
параметрами качества. Благодаря использованию ПИ – регуляторов система является
астатичной по заданию и по возмущению. В замкнутой системе жесткость
характеристик не меняется.