Универсальная система управления маслонапорной установкой гидроэлектростанции
СОДЕРЖАНИЕ
Реферат
Список
используемых сокращений
Введение
1. Описание
конструкции и функционирования маслонапорной установки ГЭС
1.1 Краткое описание устройства и
функционирования гидроэлектростанции
1.2 Описание устройства и
функционирования МНУ
1.3 Основные узлы МНУ
1.4 Технические характеристики МНУ
4/1-40-4,0-2 производства ОАО «Тяжмаш»
2.
Разработка системы управления МНУ
2.1.1 Требования к системе управления
2.1.2 Требования надежности
2.2 Постановка основных задач синтеза
системы управления МНУ
2.3 Временные параметры управления
2.4 Контрольные значения параметров
технологического процесса
2.5 Вопрос о ручном режиме управления
2.6 Уточнение и изменение конструкции
МНУ в соответствии с задачами управления и идеологий проектируемой системы
управления
2.7 Структурная схема системы
управления
3. Создание
логической модели системы управления МНУ
3.1 Синтез логической модели системы
управления
3.2 Моделирование алгоритма
управления в программном пакете математического моделирования MATHLAB
3.3 Модель блока управления
пневмоклапанном
3.4 Модель блока управления
маслонагревателем и охладительной установкой
3.5 Модель блока управления насосами
4.
Проектирование системы автоматизированного управления с использованием пакета
Rational Rose52
4.1 Определение требований к системе
4.2 Построение структуры системы
4.3 Создание диаграммы классов
4.4 Взаимодействие компонентов
системы
4.5 Построение алгоритма работы
системы
4.6 Создание программного кода
5.
Аппаратная и программная реализация системы управления МНУ ГЭС
5.1 Выбор платформы системы
управления
5.2 Описание линии контроллеров
S7-300
5.2.1 Модульное построение
5.2.2 Структура S7-300
5.3 Выбор модуля центрального
процессора
5.4 Режимы DP–Master и DP-Slave
5.5 Выбор модулей ввода вывода
микроконтроллера
5.5.1 Цифровые модули ввода/вывода
5.5.2 Цифровой модуль ввода SM 321;
DI 16 24 VDC
5.5.3 Аналоговый модуль ввода SM 331;
AI 8 x 12Bit
5.6 Выбор источника питания системы
управления
5.7 Выбор дискретных датчиков
5.7.1 Дискретные датчики уровня
5.7.2 Датчики засорения фильтра
5.7.3 Датчик наличия конденсата
5.7.4 Датчики положения перепускных
клапанов
5.8 Аналоговые датчики
5.8.1 Датчик давления в ГА
5.8.2 Датчик температуры в сливном
баке
5.9 Подбор коммутационное
оборудование
5.9.1 Устройство плавного пуска
электродвигателей
5.9.2 Вспомогательный контактор
5.10 Разработка алгоритма программы
управления маслонапорной установкой
5.10.1Специфика программирования
микроконтроллеров Siemens
5.10.2 Описание алгоритма работы мну
5.10.3 Основная программа управления
5.10.4 Подпрограмма опроса датчиков
МНУ
5.10.5 Подпрограмма запуска
компенсационного насоса
5.10.6 Подпрограмма запуска основного
насоса
5.10.7 Подпрограмма запуска
резервного насоса
5.10.8 Подпрограммы отключения
насосов
5.10.9 Подпрограмма контроля и
корректировки уровня масла в ГА
5.10.10 Подпрограмма контроля и нормализации
температуры в сливном баке
6.
Технико-экономическое обоснование
6.1 Пути снижения затрат за счет
внедрения системы
6.2 Технико-экономические показатели
эффективности от внедрения новой системы автоматизации
6.2.1 Экономия в заработной плате высвобождаемых
рабочих
6.2.2 Расчет стоимости оборудования
6.2.3 Годовые затраты на ремонтные
работы
6.2.4 Годовые затраты на
электроэнергию
6.2.5 Годовые амортизационные
отчисления на оборудование
6.2.6 Годовые затраты на эксплуатацию
6.2.7 Экономический эффект за счет
уменьшения количества отказов МНУ
6.2.8 Экономический эффект за счет
уменьшения сроков ремонтных работ
6.2.9 Прочая экономия
6.2.10 Годовая экономия от внедрения
АТК
6.2.10 Годовой экономический эффект
6.2.12 Капитальные затраты на
разработку и ввод в эксплуатацию АСУТП
6.2.13 Срок окупаемости капитальных
вложений
6.2.14 Сводная таблица основных
параметров
7. Охрана
труда и окружающей среды
7.1 Факторы повышенной опасности
связанные с эксплуатацией маслонапорных установок
7.2 Правила техники безопасности при
обслуживании сосудов, работающих под давлением
7.3 Правила техники безопасности
применяемые персоналом ГЭС во время выполнении ремонтных работ с сосудами
высокого давления
7.4 Правила техники безопасности при
обслуживании электрических частей МНУ
7.5 Мероприятия по обеспечению
электробезопасности МНУ
7.6 Охрана окружающей среды
Заключение
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
Реферат
Пояснительная
записка состоит из 129 страниц текста, содержит 29 графических иллюстраций,
четыре таблицы. При работе над проектом было использовано более 20 различных
источников информации.
Графическая
часть состоит из 7 листов формата А1.
Перечень
ключевых слов: система автоматического управления, гидроэлектростанция,
маслонапорная установка, универсальность, микроконтроллер, гидроаккумулятор,
логическое моделирование, надежность.
Целью
работы было проектирование универсальной системы управления маслонапорной
установкой гидроэлектростанции соскобной работать на ГЭС различного типа.
Взаимодействовать с системой управления ГЭС без участия человека. Особое
внимание уделялось повышению надежности и ресурса маслонапорной установки. В
качестве управляющего устройства был применен микроконтроллер фирмы Siemens Somatic S7-300. Взаимодействие с центральным контроллером ГЭС
осуществляется по средствам сети PROFIBUS. Применяемое оборудование достаточно современно и обладает высокими
показателями качества надежности, что позволяет говорить о создании надежной
системы управления.
Данная
разработка востребована на современном рынке и при доведения ее до уровня
промышленного образца может быть использована на маслонапорных установках
производства оао «Тяжмаш».
Внедрение
данной разработки дает хороший экономический эффект и она быстро окупается.
Кроме того, она позволяет вывести системы управления ГЭС на качественно новый
уровень. ГЭС при использовании подобных систем может работать в полностью
автоматическом режиме, при контроле за работой всего одного человека, в
перспективе возможно создание полностью автоматических станций.
Список
используемых сокращений
МНУ –
маслонапорная установка;
ГА –
гидроаккумулятор;
САУ –
система автоматического управления;
ГЭС –
гидроэлектростанция;
ТЭН –
теплоэлектронагреватель;
КТС –
комплекс технических средства;
ЭВМ –
электронная вычислительная машина;
Введение
В современном обществе
все больше возрастает потребность в энергоресурсах. В то же время запасы
ископаемого топлива, такого как уголь, природный газ нефть, стремительно
уменьшаются. По самым оптимистическим прогнозам, запасов ископаемого топлива хватит
не более чем на сто лет использования, при сохранении существующих темпов
добычи. Кроме того, сжигание углеродного топлива крайне негативно отражается на
экологической обстановке. Загрязнение атмосферы продуктами сгорания, почв и
водоемов при транспортировке нефтепродуктов и т.д.
Одним из традиционных
альтернативных источников энергии являются гидроэнергетические ресурсы.
Человечество многие века использовало энергию течения рек для приведения в
движение машин и механизмов, например всевозможных мельниц. Современно общество
привыкло для удовлетворения своих потребностей использовать электрическую
энергию. Этот вид энергии удобно передавать на расстояние и преобразовать в
любой другой вид энергии - тепловую, механическую, энергию химического
взаимодействия и другие.
Для преобразования
энергии водного потока в электрическую используются гидроэлектростанции (ГЭС).
Россия – занимает лидирующее место по суммарной мощности гидроэнергоресурсов в
мире. В нашей стране созданы крупнейшие каскады ГЭС на реках Волге, Енисее и
других. В данный момент почти все возможные места установки крупных ГЭС
использованы. Дальнейшее увеличение мощностей крупных ГЭС сложно и дорого. В то
же время, в России еще множество малых и средних рек, особенно в горной
местности, которые обладают значительным энергетическим потенциалом. Горная
местность удобна для строительства плотин. Так же в горной местности не
происходит отчуждения больших площадей ценных земель, как в случае с равнинными
реками. Кроме того большой перепад высот, а следовательно, и напор, позволяет и
при малом расходе воды, получать большую выходную мощность.
Рынок малых и средних ГЭС
в России является еще сравнительно мало освоенным и очень перспективным. В то
же время существующие электростанции нуждаются в реконструкции и модернизации.
В первую очередь это относится к электрооборудованию и системам автоматики.
Современная малая ГЭС для
повышения рентабельности и других эксплуатационных качеств должна иметь
надежную, точную и оптимальную систему управления. Глубокая автоматизация с
использованием современных микропроцессорных и сетевых технологий в системах
управления ГЭС позволяет создать станцию управляемую одним оператором. Кроме
явных расходов на заработную плату персоналу, существует еще и проблема
доставки людей в труднодоступную местность. Кроме того качественная система
управления предостережет оператора от ошибки и увеличит до максимума выработку
электроэнергии. В будущем перед разработчиками ставится цель создание полностью
автоматизированной системы управления, не требующей постоянного присутствия
человека на станции. Или же возможность управления в телеоператорном режиме
несколькими станциями с центрального контрольного пункта удаленного в любое
удобное оператору место.
В данной работе
рассматривается вопрос создания автоматизированной системы управления
маслонапорной установкой ГЭС с использованием современных подходов, в области
разработки распределенных систем управления на основе микроконтроллеров.
Система управления представляет собой полностью независимую систему управления
отдельной установкой (маслонапорной станцией) с системой управления ГЭС и
оператором взаимодействует по средствам сетевого интерфейса. Такая схема
позволяет использовать ее с различными маслонапорными установками и
управляющими системами ГЭС поддерживающими интерфейс сети PROFIBUS. Ряд примененных приемов
проектирования и подход к проблеме в целом позволяют говорить о разработке
универсальной системой управления маслонапорной установкой гидроэлектростанции.
Данное изделие востребовано на рынке Росси, в частности ОАО «Тяжмаш» могло бы
оснащать ею свои изделия.
Маслонапорная установка
является неотъемлемой составной частью большинства современных ГЭС. Без этой
установки невозможно производить регулирование турбины. Следовательно отказ МНУ
приводит к простою всей электростанции, а это колоссальные убытки. Снижение
расходов на обслуживание и продление межремонтного срока, а также упрощение
диагностики неполадок в совокупности с повышением надежности, позволяет
говорить о значительной выгоде связанной с применением новой системы управления
вместо традиционной при модернизации существующих станций. Это представляется
очень важной областью применения разработки в связи с тем фактом, что в данный
момент износ управляющего оборудования составляет более 80% на 90% всех
российских ГЭС.
Кроме того, к вновь
строящимся ГЭС предъявляются новые требования, такие как снижение числа
обслуживающего персонала, а также повышение надежности всей станции в целом,
при повышение качества вырабатываемой электроэнергии и ее общегодового выпуска.
Система реализована на
современной базе элементов. При подборе компонентной базы внимание уделялось
надежности, ремонтопригодности и экономической выгоды при применении каждого
конкретного элемента. Но предпочтение отдавалось в первую очередь компонентам отечественного
производства. Однако и требования надежности и качества изделий тоже
существенны. По этому управляющий микроконтроллера и ряд датчиков и
коммутационное оборудование использовано производства немецкой фирмы Siemens.
Так как основной целью
работы было создание автоматической системы роль человека в ее управление
сведена до минимума. Даже сигнал на запуск, остановку и задание параметров
работы производится управляющим контроллером уровня ГЭС, который
взаимодействует с оператором через специальную ЭВМ реализующую управляющие
контрольные функции в масштабах всей электростанции в целом. Что позволяет нам
говорить о создании ГЭС «одного человека». В последствии при развитии системы
можно предсказать появление полностью автоматических станций, что позволит
размещать их в труднодоступных местах.
Разработанная система
отличается возможность применения на различных маслонапорных установках,
отличающих производительностью и давлением масла. В то же время большинство
установок имеют сходные конструкции. Данная система предполагает полную
переносимость на различные МНУ, не связанную с заменой программного обеспечения
и основной аппаратной части системы. Изменения касаются лишь силовой автоматики
(эта часть в рамках диплома не рассматривается), а она как правило выбирается в
зависимости от необходимых характеристик МНУ и связана с конструкцией МНУ, но
не с применяемой системой управления.
Однако при разработке
ориентировались на использование системы на маслонапорной установке типа МНУ
4/1-40-4,0-2 производства оао «Тяжмаш», и все приведенные параметры относятся к
этой конкретной установке, так как это изделие можно считать примерно
усредненной и наиболее распространенной МНУ в нашей стране. Кроме того у
данного изделия значительный объем выпуска (более 15 установок в год). И данное
предприятие рассматривается как наиболее вероятный потребитель данных систем
управления. Но как сказано выше, система не теряет своей универсальности и
способна применяться и на других изделиях подобной конструкции.
1. Описание конструкции
и функционирования маслонапорной установки ГЭС
Маслонапорная напорная
установка является составной частью практически любой гидроэлектростанции. Без
данной установки не возможна работа всей ГЭС. По этому она имеет ряд специфических
особенностей отличающих ее от маслонапорных станций прочего назначения. Главное
отличие заключается в наличие аккумулирующего элемента, который позволят
производить управление ГЭС в течении некоторого времени после остановки МНУ.
1.1 Краткое
описание устройства и функционирования гидоэлектростанции
Гидроэлектростанция представляет собой комплекс
гидротехнических сооружений, создающих напор, подводящих к турбинам и отводящих
от них воду, здания ГЭС, в котором размещаются гидроагрегаты, механическое
и электрическое оборудование.
Путем возведения
гидротехнических сооружений можно создавать напоры от 3 до 2000 метров, если
это позволяет водоток и рельеф местности. Имеются три основных схемы
использования водной энергии:
·
Плотина - сосредоточенный напор создается
плотиной.
·
Деривационная - сосредоточенный напор создается с
помощью деривационных – каналов, туннелей, трубопроводов.
·
Плотинно-деривационная – напор создается как плотиной, так
и деривацией, которая отходит от плотины в виде деривационного канала, туннеля
или трубопровода.
При большом разнообразии
сочетаний напоров и расходов для разных ГЭС требуются гидротурбины различных
классов и систем, отличающиеся размерами и конструкциями.
В настоящее время
применяются турбины двух классов – реактивные и активные. Деление
на классы производится в зависимости от вида гидравлической энергии,
преобразуемой рабочим колесом турбины. Турбины,
преобразующие гидравлическую энергию в механическую в основном за счет
потенциальной энергии потока, отнесены к классу реактивных турбин, а турбины,
преобразующие гидравлическую энергию в механическую за счет кинетической
энергии потока, отнесены к классу активных турбин.
Реактивные турбины являются самыми
распространенными и применяются при наиболее часто встречающихся напорах на ГЭС
(от 3 до 700 м).
Турбины
реактивного класса делят на системы по принципу протекания потока воды по
рабочему колесу. Если поток поступает на лопасти рабочего колеса и протекает по
ним в направлении, параллельном оси вращения турбины, то такие турбины называют
осевыми, они представлены на Рис. 1.1 а и г..

Рис. 1.1
В турбинах,
где меридианные составляющие скорости наклонны относительно оси турбины,
названы диагональными (Рис. 1.1 в). Турбины, лопасти рабочего колеса
которых устанавливаются в зоне поворота меридианных скоростей из радиального
направления в осевое, названы радиально - осевыми (Рис. 1.1 б).
Дополнительным признаком системы является
возможность поворота лопастей рабочего колеса и изменение расположения оси
турбины.
Активные турбины, преобразующие кинетическую
энергию потока с помощью системы ковшей, названы ковшовыми (Рис. 1.1 д).
Каждая система включает несколько типов турбин (серий), характеризуемых геометрическим
подобием элементов проточной части и одинаковыми относительными потерями в ней.
Обобщенным показателем типа турбины является
коэффициент быстроходности. По значению коэффициента турбины делятся на
тихоходные, средние и быстроходные.
Быстроходность турбины определяется в основном
формой проточной части рабочего колеса, а также числом и формой его лопастей.
Типы турбин маркируют по типу рабочего колеса. Так как с турбиной могут применяться
различные спиральные камеры, отсасывающие трубы и др., то тип рабочего колеса
должен включать несколько серий.
Для того чтобы выбрать оптимальные тип и систему
турбины, необходимо проводить технико-экономические расчеты и всесторонний
анализ с учетом основных преимуществ и недостатков рассматриваемых вариантов,
сравнительных данных по массе и стоимости энергетического оборудования,
габаритам, возможности транспортировки к месту назначения.
У всех без
исключения типов электростанций есть одна особенность, их мгновенная мощность
всегда должна равняться потребляемой мощности нагрузки. А эта величина весьма
не стабильная. Кроме того, на ГЭС как правило устанавливают генераторы
переменного тока. В нашей стране промышленная частота электрического тока составляет
50 Гц. По ГОСТ допускается лишь незначительное отклонение частоты от заданной
0,1%. Так как генераторы электрического тока применяемые на ГЭС являются
синхронными машинами, частота вырабатываемого ими тока является функцией числа
оборотов рабочего колеса гидротурбины. Которое в свою очередь определяется
напором и расходом воды воздействующей на рабочее колесо, характеристикой
рабочего колеса и нагрузкой на вал турбины со стороны генератора. Рабочее
напряжение на многих генераторах также не может быть получено при слишком
заниженной частоте вращения.
Так как ГЭС должна обеспечивать
потребителей электрическим током постоянной частоты и напряжения, при мощности
не превышающей установленную максимальную мощность электростанции, получаем
основную задачу регулирования – поддержание постоянной частоты вращения вала
генератора. Конструктивно вал генератора и рабочего колеса выполняются зацело
или с жесткой механической связью. Следовательно, мы можем говорить о
поддержание частоты вращения рабочего колеса.
Для реализации
регулирования частоты вращения имеются несколько возможностей:
―
Изменение
нагрузки. Производится путем подключения дополнительных балластных
сопротивлений на выход генератора. Ввиду того, что в зависимости от мощности
турбины может возникнуть потребность в отведение огромного количества тепла,
что сложно технически и экономически не целесообразно, этот способ применяется
лишь как второстепенный, повышающий общее качество регулирования. А так же на
малых и особо малых ГЭС. На последних этот способ может быть основным и даже
единственным.
―
Механическое
торможение рабочего вала. Это тоже достаточно сложно реализуется технически и
не применяется для постоянного регулирования. Однако практически на любой
турбине есть механический тормоз предотвращающий угон и разрушение агрегата,
например, при внезапной потери нагрузки (обрыв линии электропередач).
―
Изменение напора
воды подводимой к гидроагрегату. Как правило напор определяется конструкцией
гидротехнического сооружения. Изменение напора не может происходить оперативно,
так как это связано с накоплением и сбросом огромного количества водных масс и
требует анализа и согласования многих зависимых факторов. Как правило такие
изменения производятся сезонно и влияют лишь на значение максимальной мощности
вырабатываемой турбиной. По этому данный способ мы не рассматриваем.
―
Изменение расхода
воды. Является основным способом регулирования частоты вращения гидротурбины.
Этот способ удобно реализуется технически и самый выгодный экономически. В
общем случае изменение расхода воды осуществляется изменением проходного
сечения канала по которому подводится вода к рабочему колесу турбины. В
радиально-осевых и поворотно-лопастных турбинах это осуществляется с помощью
специального механизма - направляющего аппарата.
―
Изменение
характеристик рабочего колеса гидротурбины. Изменением геометрических
характеристик лопастей, возможно изменение КПД рабочего колеса при некоторых
постоянных напоре и расходе. Таким образом можно подстраивать рабочее колесо на
более оптимальный режим работы при определенной мощности нагрузки. Технически
это реализуется как правило поворотом лопастей, то есть изменением их шага.
Последние два способа,
наиболее экономически целесообразны и технически реализуемы. Поворот
направляющего аппарата и лопастей осуществляют как правило с помочью
гидравлических сервомоторов. Такой выбор привода связан с тем, что
гидравлические сервомоторы обладают рядом особенностей:
―
Компактность. При большой мощности они обладают
малыми размерами и весом, что облегчает их установку.
―
Широким
диапазоном регулирования частоты вращения.
―
Безопасностью.
Отсутствует
необходимости в защите от поражения электрическим током. Как правило
сервомоторы работают в условиях повышенной влажности. Этот факт снижает
вероятность получения травм персоналом, ведь даже для управления золотниками не
используется электрический ток с напряжением свыше 24 вольт.
―
Простота регулирования. Для реализации всех возможных
режимов работы, включая реверс, используется не сложная по конструкции колонка
золотников.
―
Существует возможность
запасти рабочее тело на случай отключения электричества или других неполадок.
Последний факт особенно
важен, та как по требованиям, предъявляемым к системам управления ГЭС
Госэнергонадзором, направляющий аппаратам при отключении электропитания должен
иметь гарантированную возможность закрыться, а, следовательно, безопасно
остановить гидротурбину не допустив ее угона и разрушения.
Рабочим телом
сервомоторов является турбинное масло под давлением. На ГЭС наиболее часто
встречаются сервомоторы на давление от 1,2 МПа до 16 МПа. Питание сервомоторов
маслом стабилизированного давления, очистку масла, нормализацию его
температуры, а также аккумулирование на ГЭС осуществляется специальным
устройством - маслонапорной установкой (МНУ). В зависимости от
конструкции электростанции она может содержать одну или несколько отдельных
МНУ. В первом случае от одной установки питаются все гидроагрегаты ГЭС. Во
втором на каждый гидроагрегат устанавливается собственная маслонапорная
станция.
На современной ГЭС
маслонапорная установка представляется как самостоятельно устройство с
собственной системой управления полностью управляющей всем технологическим
процессом связанным с ее предназначением. Изменение параметров и режимов работы
производятся в соответствии с получаемыми от системы управления ГЭС инструкциями.
В качестве выходной информации управляющее устройство МНУ возвращает значения
основных контролируемых параметров, режимы работы, предупреждения о возможности
возникновения аварийных состояний.
1.2 Описание устройства и функционирования МНУ
Маслонапорная установка
ГЭС предназначена для питания маслом под давлением гидравлические системы
регулирования гидротурбины. Рабочей средой служит масло Тп-30 (ГОСТ 9972-74). К
МНУ предъявляются следующие требования.
―
Поддержание
давления масла на заданном уровне.
―
Обеспечение
максимальной производительность превышающей максимально возможный расход
рабочего тела при работе ГЭС.
―
Поддержание
температуры масла в заданном диапазоне.
―
Очистка масла от
примесей.
―
Аккумулирование
рабочего тела в количестве достаточном для трехкратного проведения аварийного
закрытия направляющих аппаратов при неработающих насосах.
―
Автоматическое
функционирование МНУ. Предотвращение и корректная обработка аварийных ситуаций.
―
Вывод информации о
текущем состоянии рабочих процессов и возникших аварийных ситуациях в сеть
информационную сеть ГЭС.
―
Возможность
перенастраивать некоторые параметры технологического процесса.
Маслонапорные
установки применяются также для управления крупными предтурбинными затворами и
насосами, затворами оросительных систем и каналов. Технические требования к
маслонапорным установкам определены ГОСТ 8339-84, а типы, основные параметры,
конструкция и размеры — ОСТ 108.023.106-85 «Установки маслонапорные для
гидравлических турбин. Типы, основные параметры, конструкция и размеры».
Маслонапорная установка
состоит из гидроаккумулятора давления и маслонасосного агрегата, соединенных
между собой гидравлической системой, напорным трубопроводом, а также аппаратуры
автоматики. При необходимости маслонапорная установка комплектуется также
маслонагревателем и маслоохладительной установкой.
Гидроаккумулятор давления
(в дальнейшем ГА) представляет собой масловоздушный сосуд, заполненный маслом и
сжатым воздухом. В гидроаккумуляторе содержится
необходимый для регулирования объем масла, остальная часть аккумулятора
заполнена сжатым воздухом. Воздух является аккумулирующей средой и в сжатом
состоянии содержит запас энергии, обеспечивающей работу механизмов
гидросистемы. Восстановление израсходованного из гидроаккумулятора объема масла
производится насосами при понижении в нем давления. Масло, нагнетаемое в
гидроаккумулятор, сжимает находящийся в нем воздух, восстанавливая тем самым
запас энергии и номинальное давление. Утечки воздуха из гидроаккумулятора
восполняются автоматически работой регулятора уровня.
В автоматическом режиме управление работой
насосов осуществляется от датчика давления гидроаккумулятора. При расходе масла
на регулирование гидротурбиной или в результате протечек масла в системе
давление в гидроаккумуляторе понижается. При достижении заданного значения
датчик давления дает команду на включение одного из насосов в работу. При
значительном расходе масла происходит дальнейшее понижение давления, датчик
давления включает в работу второй насос. Одновременно с включением насоса
подается сигнал на закрытие перепускного клапана. При этом происходит разгрузка
насоса через перепускной клапан, что создает благоприятные условия для запуска
электродвигателя насоса. При достижении в гидроаккумуляторе номинального
давления перепускные клапаны открываются и после этого выключаются
электродвигатели насосов. Вспомогательный (компенсационный) насос используется
для восполнения протечек в системе и имеет значительно более низкую
производительность чем основные. В процессе работы воздух из гидроаккумулятора
постоянно расходуется на утечки через неплотности соединений в воздушной части
гидроаккумулятора, а также в растворенном виде вместе с маслом. Для восполнения
потерь воздуха на масловоздушном сосуде гидроаккумулятора устанавливается
поплавковый регулятор уровня который при каждом отклонении уровня масла в
гидроаккумуляторе от номинального впускает порцию сжатого воздуха из ресивера
ГЭС.
При отклонении от нормы основных параметров
давления, уровня или температуры установленные на МНУ датчики подают
соответствующие сигналы. При аварийном понижении давления или уровня масла в
гидроаккумуляторе датчики уровня и давления масла дают команду на аварийную
остановку гидроагрегата. При понижении уровня масла в сливном баке до уровня,
при котором невозможна нормальная работа насосов, датчик уровня масла отключает
электродвигатели насосов. При появлении воды в сливном баке выше нормы датчик
наличия конденсата подает предупредительный сигнал. Отработанное масло
из системы поступает в сливной бак, где фильтруется и частично освобождается от
воды и воздуха. Для этого бак оборудуется сетчатым рамным фильтром и воздушным
фильтром. Фильтрация тонкая очистка масла производится бумажными фильтрующими
элементами установленными на выходе каждого насоса. Зарядка гидроаккумулятора
воздухом производится через обратный клапан. Технологическая схема
представленная на рисунке (Рис. 1.2), дает наглядное представление об
устройстве и функционировании МНУ.
1.3 Основные узлы МНУ
Общий вид маслонапорной установки и расположение
основных элементов представлен на Рис. 1.3
Гидроаккумулятор МНУ представляет собой
масловоздушный сосуд, заполненный маслом и сжатым воздухом или газом (азотом) и
оборудованный приборами контроля, автоматики и защиты.
Сосуд гидроаккумулятора представляет собой
сварную цилиндрическую конструкцию с эллиптическими днищами, изготовленную из
листовой стали. Сосуд оборудованы лазовым затвором, грузовыми приспособлениями
и опорами для установки их на фундамент. В нутрии гидроаккумулятора создается
избыточное давление от 1,5 до 16 МПа. Следовательно конструкция сосуда должна
позволять поддерживать в нем повышенное давление без опасности разрушения в
течении всего срока службы МНУ.
На гидроаккумуляторе установлены:
―
манометр;
―
указатель
уровня масла с прозрачной стеклянной трубкой, ограждением и запорными
устройствами, предупреждающими выход рабочей среды наружу при поломке
стеклянной трубки;
―
датчик
уровня масла для сигнализации о высоком и низком уровне масла;
―
датчик
аварийно-низкого уровня масла для аварийной остановки гидроагрегата;
―
датчики
давления для автоматического управления насосами;
―
датчик
давления для остановки гидроагрегата при аварийно-низком давлении.
―
устройство
автоматической подачи воздуха в гидроаккумулятор из воздухосборника ГЭС;
Маслонасосный агрегат состоит из сливного бака
и установленных на нем трех масловинтовых насосов. Третий насос меньших
размеров и предназначен для восполнения протечек в системе. Насосы соединяются
с электродвигателями эластичными муфтами и устанавливаются на верхней крышке
сливного бака.
На напорной камере каждого из насосов установлены
обратный, предохранительный и перепускной клапаны. Напорные патрубки
насосов объединены общим коллектором. На выходе каждого насоса подключен фильтр
тонкой очистки масла со сменным бумажный фильтрующим элементом и датчиком
засорения. Запорные вентили позволяют отсоединить любой из насосов и вывести
его из работы без остановки маслонапорной установки.
Сливной бак разделен на зоны чистого и
отработанного масла. Между зонами установлен сменный сетчатый фильтр. Верхняя
часть бака, на котором установлены рамы с насосами и электродвигателями,
представляет собой жесткую массивную раму.
Сливной бак на 40 % заполнен маслом. В свободный
объем бака при ревизиях и ремонтах может быть слито масло из аккумулятора,
сервомоторов направляющего аппарата и трубопроводов. Уровень масла в баке
контролируется датчиком уровня. Воздушный объем бака соединяется с
атмосферой через воздушный фильтр. Для смены сетчатого фильтра, а также для
очистки, ремонта и окраски внутри бака в верхней части предусмотрен люк с
крышкой. На сливном баке установлены также датчик температуры масла, датчик
наличия конденсата, вентиль, соединенный с напорным коллектором, для
выпуска масла из гидроаккумулятора. Также в баке устанавливается
маслонагреватель, представляющий собой электрический нагреватель погруженный в
масло. Он необходим для прогрева масла в холодное время года, так как для
нормальной работы системы необходима стабильная вязкость масса. При чрезмерном
нагреве масла происходит его разжижение, что приводит к снижению
производительности насосов и другим нежелательным последствиям. Для понижения
температуры масла предусмотрена маслоохладительная установка. Она состоит из
проложенных внутри бака трубопроводов в которых протекает вода и клапана
обеспечивающего включение и отключение воды по сигналу датчика температуры.
1.4 Технические характеристики МНУ 4/1-40-4,0-2
производства оао «Тяжмаш»
Обозначение установки МНУ
4/1-40-4,0-2, где
МНУ – маслонапорная
установка
4,0 – объем
гидроаккумулятора в м3;
1 – количество сосудов
гидроаккумулятора;
40 – номинальное давление
в кгс/см2;
4,0 – объем сливного бака
в м3;
2 – количество насосов;
Технические
характеристики МНУ.
|
Рабочее
давление в Гидроаккумуляторе, МПа
|
4,0
|
|
Полный
объем Гидроаккумулятора, м3
|
4,0
|
|
Рабочий
объем масла в Гидроаккумуляторе, м3
|
1,5
|
|
Объем
сливного бака, м3
|
5,0
|
|
Рабочий
объем масла в сливном баке, м3
|
2,0
|
|
Количество
рабочих масловинтовых насосов, шт.
|
2
|
|
Количество
компенсационных шестеренчатых насосов, шт.
|
1
|
|
Рабочее
давление всех насосов, МПа
|
4,0
|
|
Производительность
рабочих насосов МВН-6, л/с
|
6
|
|
Производительность
компенсационного насоса Г11-23, л/с
|
0,8
|
|
Число
оборотов насосов, об/мин
|
1450
|
|
Количество
электродвигателей АИР180S4У3
привода рабочих насосов, шт.
|
2
|
|
Мощность
электродвигателей основных насосов , кВт
|
45
|
|
Число
оборотов электродвигателей всех насосов, об/мин
|
1500
|
|
Напряжение,
В
|
380
|
|
Мощность
электродвигателя АИР100S4У3,
привода компенсационного насоса, кВт
|
4
|
|
Конструктивное
исполнение всех электродвигателей IM1081
|
|
|
Число тепло
электронагревателей (мощностью 3,75 кВт)
|
2
|
|
Число
датчиков аналоговых (выходной ток, 4-20 мА)
|
3
|
|
Число
датчиков дискретных (выходное напряжение, + 24В)
|
13
|
|
Число
перепускных клапанов (с электромагнитами ЭМД-6)
|
3
|
|
Число
клапанов электромагнитных
|
2
|
Контрольно-измерительные
приборы
Для
визуального наблюдения за параметрами работы МНУ установлены:
―
на ГА – манометр,
указатель уровня;
―
на баке –
указатель уровня.
Для
автоматической сигнализации, измерения и управления установлены:
―
на ГА – датчики
уровня, датчик давления;
―
на баке – датчик
уровня, датчик температуры , датчик наличия конденсата в масле.
2. Разработка системы управления МНУ
2.1 Требования к системе управления
К системе автоматического управления маслонапорной
установкой ГЭС предъявляется ряд требований относительно выполняемых ее
функций. Разрабатываемая система должна выполнять следующие задачи:
―
управление исполнительными механизмами МНУ
(маслонасосами, терморегулятором, перепускными клапанами и воздушным клапаном)
в автоматическом режиме;
―
разгрузку электродвигателей маслонасосов при пусках и
остановках;
―
автоматическое
поддержание заданного давления и уровня масла в гидроаккумуляторе МНУ;
―
автоматическое
поддержание заданной температуры в сливном баке МНУ;
―
прием
и обработку информации о текущих значениях параметров работы МНУ;
―
Передачу
текущих параметров МНУ управляющему контроллеру ГЭС, для их дальнейшей
обработки и отображения на инжиниринговой машине, для информирования оператора;
―
формирование
и выдачу сигналов на органы управления МНУ;
―
формирование и выдачу сигнала «Отказ МНУ» при
аварийно-низком давлении или уровне масла в гидроаккумуляторе МНУ;
―
остановку маслонасосов при аварийно-низком уровне
масла в сливном баке;
―
распознавание предаварийных состояний системы,
своевременное оповещение главного контроллера ГЭС о предаварийном состоянии
процесса.
―
управление работой системы в предаварийном состоянии, с
целью снижения вероятности полного отказа МНУ, а как следствие, аварийной остановки
ГЭС;
―
обеспечение максимальной возможной работоспособности при
отказе отдельных элементов установки, то есть поддержание рабочего процесса
вплоть до достижения контролируемых параметров уровня, при котором дальнейшая
работа установки невозможна.
―
учет наработки основного насоса и производить
переключение между основным и резервным насосами при достижении основным
насосом наработки в 100 часов. После чего отсчет должен начинаться снова.
―
питание датчиков МНУ.
Электропитание САУ
МНУ должно обеспечиваться от:
―
основного источника переменного тока номинальным
напряжением 220 В (±10%)и
частотой 50 Гц;
―
резервного источника постоянного тока номинальным
напряжением 220 (+11/-33) В.
САУ МНУ должна обеспечивать контроль за текущим
состоянием МНУ, при отсутствии напряжения переменного тока в сети, но при сохранении
питания от резервного источника питания.
По внешним воздействующим
факторам оборудование САУ МНУ должно соответствовать требованиям ГОСТ 15150
группы О4:
рабочая температура,
ºС-5…+45
предельная рабочая повышенная
температура, ºС+55
предельная рабочая пониженная
температура, ºС-5
относительная влажность (при
35 °С),
%98% без конденсата
атмосферное давление,
кПа84…106
Система управления должна обеспечить прием и
обработку до 14 входных дискретных сигналов со следующими характеристиками:
напряжение входной логической единицы от +10 до +30
В;
напряжение входного логического нуля от 0 до +5 В.
САУ МНУ должна обеспечить прием и обработку до 3 входных
унифицированных аналоговых сигналов - постоянный ток 4..20 мА (входное
сопротивление модуля 250 Ом);
САУ МНУ должна обеспечить формирование и выдачу до
10 дискретных сигналов управления нагрузкой напряжением питания 24 В
постоянного тока и током до 0,5 А для управления электромагнитными реле,
пускателями и устройствами плавного пуска электродвигателей.
САУ МНУ должна обеспечить формирование и передачу по
сети «PROFIBUS» информацию о
параметрах МНУ (давление в гидроаккумуляторе МНУ, уровень масла в гидроаккумуляторе,
уровень масла в сливном баке, температура масла в сливном баке.)
2.1.1
Требования надежности
Система управления МНУ должна иметь следующие
показатели надежности:
―
полный
средний срок службы не менее 30 лет;
―
срок
службы до первого капитального ремонта не менее 6 лет;
―
средний
ресурс до первого капитального ремонта не менее 30000 часов;
―
коэффициент
готовности не менее 0,97;
―
коэффициент
технического использования не менее 0,93;
―
средняя
наработка до отказа не менее 12000 часов.
САУ МНУ должна удовлетворять требованиям
безопасности, охраны труда и производственной санитарии в соответствии с ГОСТ
12.2.003 и Законом РФ «Об охране труда».
Электрооборудование САУ МНУ должно отвечать
требованиям «Правил устройства электроустановок», «Правил техники безопасности
при эксплуатации электроустановок электрических станций и подстанций»,
ГОСТ12.2.007.0 и ГОСТ12.2.007.1.
Оборудование САУ ГЭС должно иметь специальные болты
для подключения к системе заземления. Заземляющие болты должны иметь
маркировочный знак по ГОСТ 2.751.
Сигнальные цвета, размеры, форма и цвет знаков
безопасности должны соответствовать ГОСТ 12-4.026.
Компоновка элементов САУ МНУ должна выполняться с
учётом требований эргономики по ГОСТ 12.2.049.
Внешний вид должен соответствовать требованиям промышленной
эстетики.
Графические символы органов управления — по ГОСТ
12.4.040.
2.2 Постановка основных задач синтеза системы
управления МНУ
В соответствие с приведенными выше требованиями к системе
управления, выделим основные задачи управления МНУ:
―
поддержание
в гидроаккумуляторе номинального давления (4,0 МПа);
―
поддержание
постоянного уровня в гидроаккумуляторе;
―
поддержание
температуры масла в сливном баке в заданном диапазоне;
―
контролировать
уровень в сливном баке;
―
управлять
электропневмоклапанном ГА;
―
контролировать
наличие конденсата в сливном баке;
―
контролировать
состояние основных технологических параметров системы и передавать их
контроллеру верхнего уровня;
―
обрабатывать
аварийные ситуации и подавать сигналы «предаварийное состояние МНУ», «отказ
МНУ»;
Управление маслонапорной установкой производится на
основании распознавания и состояний системы выполнения соответствующих
действий.
Таблица 2.1 содержит описание основных состояний
системы и необходимые в каждом состояние действия.
2.3
Временные параметры управления
Общее время реакции контроллера на изменение какого либо параметра
техпроцесса не должно превышать 500 мкс. Это обусловлено скоростью протекания
процессов в системе и было получено в результате расчета и экспериментальных
исследований на предприятии изготовителе маслонапорной установки. При таком
показателе возможна реализация полноценного алгоритма управления, позволяющего
гарантировать работу МНУ в заданных режимах. А также своевременно передавать
информацию о неполадках центральному контроллеру ГЭС, для обеспечения им
принятия решения о продолжении функционирования в штатном режиме или начале
процедуры аварийной остановки всей ГЭС.
Общее время подготовки к запуску не должно превышать пяти минут, а
аварийная остановка должна проводится в течении 10-15 секунд. Открытие
перепускного клапана должно производится на 5-10 секунд после запуска
электродвигателя насоса и за 5-10 секунд перед отключением двигателя насоса.
Контроль за вялотекущими процессами например, изменением температуры масла в
сливном баке, может осуществляться с периодичностью 1 - 2 минуты.
Для повышения качества работы системы управления, обеспечения
возможности применения АСУ на других маслонапорных установках необходимо обеспечить
возможность изменения временных постоянных управления. По этому считаем, что
они должны передаваться главной системой управления ГЭС при запуске МНУ.
2.4 Контрольные значения параметров технологического процесса
Так как не возможно обеспечить наилучшее качество управление
маслонапорной установкой без корректировки значений отдельных параметров
технологического процесса, с которыми производится сравнение текущих значений
параметров процесса (установок управления), следует предусмотреть возможность
изменения значений установок давления в ГА, температуры в сливном баке времени
открытия перепускных клапанов. Значения уровней жидкости в ГА и сливном баке
устанавливаются при проектировки МНУ и в течении срока службы МНУ корректировки
не подлежа.
Возможность изменять значение давлений включения и отключения
насосов, электронагревателя и охладительной установки необходима для настройки
МНУ на оптимальный с экономической точки зрения и обеспечивающий наивысшее
качество поддержания давления и уровня масла в ГА.
Возможность перенастраивать систему нужна также для обеспечения
возможности использовать одну и туже систему управления с различными МНУ.
Контроллер и его управляющая программа не обеспечивают оптимизацию
алгоритма управления и не ведут статистику параметров рабочего процесса. Для
этого контроллер не обладает достаточными вычислительными ресурсами.
Производить сложную обработку статистических параметров в самом
микроконтроллере не целесообразно, т.к. это требует значительных аппаратных
ресурсов и сложной программы управления. Это экономически не целесообразно.
Кроме того конструкция системы управления не предполагает наличие прямого
интерфейса для работы с оператором и следовательно выработать оптимальный режим
управления и согласовать его с оператором не возможно.
Однако система управления ГЭС имеет в своем составе мощную ЭВМ –
инжиниринговую машину, которая осуществляет сбор информации о состоянии всей
ГЭС в целом. Визуализацию значений контрольных параметров в удобном для
оператора виде. Взаимодействует с оператором. позволяя ему управлять процессом,
вносить изменения в критерии управления. Аппаратных средств данной ЭВМ
достаточно для реализации сложных алгоритмов статистической обработки данных о
состоянии всех параметров гидроэлектростанции в целом. Обеспечить настройку
всех узлов системы на согласованную совместную работу. Также такая система
обеспечивает возможность пользователю выбирать критерии оптимизации в
соответствии с изменением плана производства электроэнергии, условиям внешней
среды и т.д.
Основные установки управления передаются контроллеру МНУ
контроллером ГЭС непосредственно при запуске системы управления маслонапорной
установкой, что позволяет каждый раз корректировать параметры работы. Избавляет
персонал от необходимости в ручную вводить контрольные значения, и позволяет
отказаться от применения дорогой энергонезависимой памяти в конструкции
микроконтроллера. Передача всех параметров технологического процесса МНУ
центральному контроллеру ГЭС осуществляется периодически во время рабочего
цикла, а также непосредственно при выходе какого либо параметра за допустимые
пределы. Повышая качество функционирования всей ГЭС в целом в МНУ введен
дополнительный аналоговый датчик уровня в сливном баке. Он необходим лишь для
контроля расхода масла в системе и не задействован в алгоритме управления МНУ.
С помощью этого датчика можно обнаружить даже незначительную убыль масла,
однако на управление маслонапорной установкой уровень в баке, до момента
достижения аварийно низкого уровня, влияние не оказывает. Следовательно данный
датчик был бы для системы избыточным. В то же время контроль за работой всей
ГЭС осуществляется диспетчером с его рабочего места и ему необходимо знать
уровень масла в баке чтобы своевременно обнаружить отклонение его от нормы и провести
необходимые в данном случае мероприятия.
Описанную выше концепцию управления значениями контрольных
параметров считаю оптимальной так как она обеспечивает повышенную гибкость
системы и экономически целесообразна.
2.5 Вопрос о ручном режиме управления
Управление
установкой в ручном режиме, а также предпусковую установку давления и уровня в
ГА производят с помощью панели ручного управления, установленной на блоке
силовой автоматике и воздействующей на реле и пускатели устройств при
отключенном контроллере.
Контроль
параметров осуществляется с помощью установленных на МНУ манометра и указателей
уровня. При прочих режимах работы установка функционирует автоматически и не
допускает прямого воздействия человека на процесс управления. Корректировка
параметров производится через инжиниринговую машину и главный контроллер ГЭС.
Изменения вступают в силу только перезапуска контроллера МНУ с новыми
параметрами управления.
Так как режим ручного управления МНУ во время функционирования ГЭС
в рабочем режиме не возможно осуществлять, вследствие отсутствия персонала
(управление всей электростанцией осуществляется с центрального пульта одним
диспетчером, который просто не в состоянии осуществлять включение и отключение
всех устройств МНУ) будем считать его только предпусковым и
профилактически-ремонтным. Во всех этих случаях контроллер мну отключается. По
этому нет смысла учитывать эти режимы при проектировки системы управления.
2.6 Уточнение и изменение конструкции МНУ в соответствии с
задачами управления и идеологий проектируемой системы управления
Чтобы
реализовать современную микропроцессорную процессорную систему управления
придется несколько изменить конструкцию установки. В первую очередь это
касается конструкции и числа и места расположения датчиков. Это связано с тем,
что управление всей установкой, всеми процессами в ней будет осуществляться
централизовано по программе микроконтроллером.
Вся информация от
датчиков стекается в микроконтроллер и на основании управляющего алгоритма и
полученных от датчиков данных здесь формируются все управляющие сигналы.
Главные изменения затронут конструкцию гидроаккумулятора потому, что нам
придется отказаться от механического поплавкового регулятора уровня в баке как
в классической системе управления МНУ. Чтобы реализовать этот регулятор в
соответствии с нашей общей концепцией проектирования системы управления на
основе управляющего микроконтроллера необходимо ввести электромагнитный
воздушный клапан который будет открываться по сигналу контроллера и впускать
воздух для восстановления уровня в ГА.
Для контроля уровня в ГА
необходимо установить датчик уровня, но аналоговые датчики уровня радарного или
емкостного типа рассчитанные на давление свыше 4 МПа очень дороги и
недостаточно надежны. В то же время нормальный и аварийные уровни
рассчитываются при проектировке МНУ и на протяжении всего срока эксплуатации
остаются постоянными. Следовательно мы можем использовать четыре дискретных
датчика уровня, при этом сложно будет производить расчет точного объема
жидкости а ГА и отслеживать динамику его изменения, но в нашем случае этого и
не требуется, так как допуск по уровню жидкости, достаточно широк, и установка
двух датчиков на границе области позволяют поддерживать уровень в нутрии
заданного диапазона. В связи с вышеописанным используем следующие датчики.
датчики:
―
Аварийно низкого
уровня масла в ГА;
―
Низкого уровня
масла в ГА;
―
Высокого уровня
масла в ГА;
―
Аварийно высокого
уровня масла в ГА;
Такое размещение датчиков
позволяет подключать любой бак гидроаккумулятора без перенастройки параметров
управляющей программы.
Следовательно открытием и
закрытием воздушного клапана контроллер будет поддерживать уровень в баке между
вторым и третьим датчиком.
В сливном баке
устанавливается два аварийных дискретных датчика уровня, срабатывание нижнего
вызывает аварийную остановку МНУ, так как в данном случае, при дальнейшем
понижении уровня ниже заборного патрубка насосов произойдет захват воздуха
насосом при дальнейшем продолжении работы перегрев и разрушение насосов.
Срабатывание верхнего датчика информирует оператора о необходимости проверки
системы и нормализации уровня в сливном баке. Аналоговый датчик уровня
предназначен для сбора данных об уровне масла в системе и контроля его расхода
и утечек, управляющий контроллер не обрабатывает эти данные, а лишь передает их
контроллеру верхнего уровня.
Контроль температуры в
баке производится термодатчиком, а решение о включении ТЭНа или охладительной
установки принимает микроконтроллер.
Включение насосов
производится также микроконтроллером при достижении давлением в ГА определенных
уставок, задаваемых контроллером ГЭС при запуске МНУ. Так при рабочем давление
4 МПа включение компенсационного насоса производится при давлении 3,8 МПа,
основного при 3,7 МПа, резервного при 3,6 МПа. Отключение насосов производится
при достижении номинального уровня давления в ГА.
Открытие и закрытие
перепускных клапанов (с проверкой исполнения) так же производятся
микроконтроллером. Контролируется и загрязнение каждого из фильтров.
Для управления процессом
микроконтроллер вырабатывает только дискретные сигналы малой мощности. Которые
затем поступают в блок силовой автоматики, где включают соответствующие
устройства которые питают исполнительные приводы и устройства электрическим
током соответствующего рода, напряжения и мощности. Например для запуска и
остановки электродвигателей сигнал поступает на устройство плавного пуска.
Такая реализация
позволяет использовать одни и те же управляющий контроллер и программу с МНУ
различных мощностей, достаточно лишь использовать соответствующую силовую
автоматику с соответствующими входными сигналами. Если какое то из устройств
отсутствует (например, охладитель масла), то этот программный модуль необходимо
отключить.
2.7 Структурная схема системы управления
Для управления процессом работы необходимо устройство, которое
будет собирать данные о состояние технологического процесса, обрабатывать
полученные данные и вырабатывать сигналы управления для поддержания параметров на
заданном уровне. Для этого используем микроконтроллер. Он состоит из блока
центрального процессора обеспечивающего выполнение арифметическо-логических
действий и управляет всем процессом в соответствии с его рабочей программой.
Модулей сбора цифровых и аналоговых данных обеспечивающих подключение датчиков,
их питания и опрос. Модуль цифрового вывода, преобразующего сигналы
микроконтроллера в электрические сигналы управления исполнительных органов. Для
подключения датчиков и нагрузок в каждом модуле имеется необходимое число
выводов.
Для сопряжения с центральным контроллером ГЭС к блоку центрального
процессора подключен коммуникационный модуль обеспечивающий реализацию
протокола сети PROFIBUS.
Питание модулей и датчиков производится от источника питания
управляющего контроллера. Питание этого источника и исполнительных механизмов
производится от сети собственных нужд ГЭС.
Контроль уровня в гидроаккумуляторе осуществляется четырьмя
дискретными датчиками уровня. Два из которых являются аварийными, а два
определяют нормальный уровень масла в сливном баке.
В сливном баке устанавливаются два дискретных датчика уровня
определяющих переполнение сливного бака и аварийно низкий уровень в нем и один
аналоговый, не использующийся для управления МНУ. Около дна сливного бака
устанавливается датчик наличия конденсата, который также является дискретным и
меняет свое состоянии при достищении конденсатом уровня установки датчика.
Шесть дискретных датчиков положения контролируют открытие
перепускных клапанов насосов и определяют засорение масляных фильтров.
Устанавливаются соответственно в блоках клапанов и в корпусе масляных фильтров.
Датчик температуры масла в сливном баке используется для
определения момента включения и отключения маслоохладительной установки и ТЭНа.
Аналоговый датчик давления устанавливается в ГА и определяет
давление в нем. Давление в ГА сравнивается микроконтроллером с уставками
управления и при необходимости производится запуск и остановку масляных
насосов.
Все аналоговые датчики подключаются к модулю аналогового ввода, а
дискретные к модулю цифрового ввода. Управляющие устройства получают сигналы от
цифрового модуля ввода.
Для запуска электродвигателя применяются устройства плавного
пуска, при появлении управляющего сигнала высокого уровня производится запуск
двигателя, при переключении на уровень «логического нуля» двигатели
останавливаются. Перепускные клапана управляются электромагнитными реле, как и
пневмоклапан и клапан охладительной установки. Для включения электронагревателя
масла применяется электомагнитный пускатель.
В данном разделе мы определи основные параметры системы
управления, ее структур, компоненту. Однако для окончательной проверки принятых
решений и анализа качественных показателей разрабатываемой системы необходимо
создать ее модели и произвести с ними эксперименты, подтверждающие или
опровергающие правоту технических решений.
3 Создание логической модели
системы управления МНУ
3.1 Синтез логической модели системы управления
Система управления маслонапорной установкой должна представлять
собой автомат с жесткой программной логикой обеспечивающий реализацию алгоритма
управления, который предусматривает выработку определенного управляющего
воздействия на каждое из возможных состояний параметров технологического
процесса.
Управляющие воздействия представляют собой дискретные сигналы двух
логических уровней («нуля» и «единицы»). Сигнал высокого уровня рассматривается
исполнительным органом как команда к запуску, а низкого уровня – к остановки
устройства.
Большинство сигналов от датчиков параметров технологического
процесса являются дискретными, с двумя значениями уровня, соответствующими «логическому
нулю» и «единице». Показания аналоговых датчиков сравниваются с контрольными
значениями и по результатам сравнения (то есть при выполнении одного или
нескольких заранее предопределенных условий) происходит запуск соответствующего
алгоритма выработки управляющего воздействия. Следовательно, после процедуры
корпорации управляющее устройство осуществляет обработку не аналоговой
величины, и даже не ее цифрового представления, а нескольких булевых
переменных, являющихся значениями функций сравнения величины и некоторого
контрольного значения – экстремума управляющей функции.
В ходе моделирования необходимо решать вопрос не о математическом
моделировании системы, а произвести синтез логической модели управления. В силу
того, что управления производится периодически при выходе параметра за пределы
нормы, а контроль и регулирование работы каких либо исполнительных органов не
производится (лишь включение и отключение) нет смысла рассматривать работу
устройства в рамках синтеза модели системы управления. Обратная связь как
таковая не осуществляется. Вместо нее производится периодический (в модели
непрерывный) опрос состояния параметров системы и новая генерация управляющего
воздействия, если этого требует состояние процесса.
При конструировании маслонапорной установки производится расчеты и
подбор оборудования в соответствии с разработанными таблицами, созданными
ведущими в отрасли научно-исследовательскими институтами на основе данных
полученных расчетным и эмпирическим путями. Следовательно маслонапорная установка
в состоянии выполнять свои функции при рабочем режиме ГЭС, значит нет
необходимости усложнять модель введением передаточных функций датчиков и
исполнительных механизмов. Достаточно точно реализовать модель логики системы
управления, как объекта разработки данного дипломного проекта.
В соответствии с вывшее сказанным систему управления маслонапорной
установкой мы можем представить как устройство с жесткой логикой, имеющее
несколько входов и выходов связанных между собой логическими функциями. Таким образом,
изменение входных сигнал ведет к изменению выходных. Следовательно, можно
представить систему управления как некоторую комбинативную схему. Пользуясь
теорией «конечных автоматов» можно выделить отдельные устройства для управления
каждым исполнительным органом.
Функция управления МНУ можно разделить на следующие подфункции
составляющие алгоритм управления отдельными устройствами МНУ.
―
Управление
основным маслонасосом;
―
Управление
резервным маслонасосом;
―
Управление
компенсационным маслонасосом;
―
Управление
электропневмоклапаном;
―
Управление
клапаном маслоохладителя охладителя;
―
Управление
электронагревателем.
Последовательная реализация всех этих модулей даст нам логическую
модель системы управления маслонапорной установкой.
3.2 Моделирование алгоритма управления в программном пакете
математического моделирования MATHLAB
Логическую модель для проверки ее правильности реализуем в среде
моделирования MATHLAB. Данный программный покат позволят простыми и наглядными
средствами программы Simulink реализовать автоматически обкатываемую
компьютером модель, с возможностью совершать вычислительные эксперименты с
моделью.
Для начала разобьем модель на три функциональных модуля.
―
Модуль
управления насосами;
―
Модуль
управления пневмоклапанном;
―
Модуль
управления температурой в сливном баке.
Указанные выше модули отражают весь алгоритм управления
маслонапорной установкой. И осуществляя контроль за выходом параметров за
аварийные рамки. Засорение фильтров и контроль положения клапана не
производится, так как в модели не отражен режим генерации предупредительных
сообщений и не учитываются возможные неполадки в механизмах. Так как нет
возможности прогнозировать производительность МНУ и потребление масла ГЭС
задавать значения контролируемых параметров будем с помощью генератора входного
воздействии в форме синусоидального сигнала определенной частоты и амплитуды.
3.3 Модель блока управления пневмоклапанном
Для управления пневмоклапанном ГА МНУ соберем следующую модель в
программе Simulink. Готовая модель представлена на рисунке. Для симуляции изменения
уровня в гидроаккумуляторе соберем генератор вырабатывающий плавно возрастающую
от 0 до 5 величину. Датчики уровня реализуем с помощью элементов типа Switch. Установим их момент переключения
равный порядковому номеру датчиков уровня от 1 до 4, где первый и четвертый
соответственно датчики аварийно низкого и высокого уровня масла в ГА, а второй
и третий (на схеме два верхних) датчики ограничивающие диапазон нормального
уровня масла в ГА. Для имитации работы дискретных датчиков подсоединим ко
входам элементов switch элементы Constant со значениями Нелей и единиц, так чтобы при
достижении уровнем какого либо датчика он переключал бы выходной сигнал с нуля
на единицу. Таким образом, реализуется контроль уровня в ГА.
Алгоритм работы пневмоклапана предусматривает, что он открывается
при достижении уровнем масла места установки датчика высокого уровня и
закрывается, при уменьшении уровня до переключения датчика низкого уровня на
ноль. Реализуем этот алгоритм используя сумматор сигналов датчиков уровня и
релейный элемент. После суммирования получаем значения от 0 до двух, при этом
значение 2 соответствует уровню жидкости выше верхнего, и требует открытия
клапана, а 0 соответствует уровню ниже нижнего, то есть моменту закрытия
клапана. Для распознования этих состояний используем релейный элемент, который
выдает значения управляющего сигнала пневмоклапана равное единице при значении
входного сигнала равном 2 и отключает при падении его до значения единицы.
Подключим на выходы с датчиков уровня и в релейного элемента Scope и запустим расчет
модели. Полученные графики представлены на, где средняя линия – это сигнал
управления пневмоклапанном. Анализ полученных результатов показывает, что
управление клапаном реализовано правильно.
Затем для обработки аварийных состояний подключим к выходам Switch 7 и 6 логический элемент
«или», а к нему элемент прекращения расчетов. Теперь при появлении сигнала
аварийно низкого и высокого уровня происходит прекращение работы, то есть
аварийная остановка.
3.4 Модель блока управления маслонагревателем и охладительной
установкой
Используя элементы Simulink создадим модель модуля управления нагревателем и
охладительной установкой. На рисунке Рис. 3.1 представлена схема модели.

Рис. 3.1
Модель состоит из генератора обеспечивающего изменение значения
температуры по синусоидальному закону. Маслоохладителная установка должна
включаться при достижении температуры уставки ее включения и отключаться при
падении температуры до номинального уровня. контроль величины по диапазону
начало и конец которого находятся на значительном расстоянии позволяет
ограничить частоту включения и отключения оборудования, что увеличивает его
ресурс. Для реализации такого алгоритма наиболее подходящим решением будет
использование релейного элемента, так как он переключает выходной сигнал именно
по такому закону. Подключим к релейному элементу выход генератора температуры и
зададим уставки температуры при которых производится включения и отключения
маслоохладителя.
Для управления маслонагревателем все выполняем аналогично,
описанной выше модели блока управления маслоохладителем, за исключением того,
что температура включения маслонагревателя меньше чем температура его
отключения. Следовательно, для работы релейного элемента необходимо
использовать обратные величины. Подключим к выходам релейных элементов и генератора
Scope и снимем диаграмму
работы модели (Рис. 3.2).
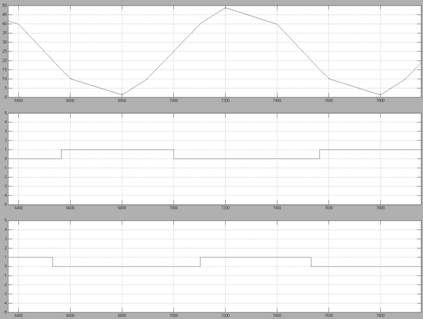
Рис. 3.2
Графики показывают, что включение и отключение оборудования
производится своевременно.
Подключим к выходу генератора устройства контроля выхода
температуры за допустимый режим.
3.5 Модель блока управления насосами
Создадим генератор имитирующий изменение давления масла в
гидроаккумуляторе. Затем с помощью релейных элементов и функций вычислении
обратной величины (как описано в предыдущем пункте) соберем компаратор, управляющий
включением и отключением каждого насоса.
Подключим к каждому выходу систему элементов обеспечивающих
включение и отключения насосов. Разберем на примере компенсационного насоса
алгоритм работы каждого из устройств, которые одинаковы, для всех насосов.
Необходимо получить режим работы соответствующий диаграмме работы
насоса представленной на Рис. 3.3.

Рис. 3.3.
Для реализации такого алгоритма разобьем его на две части –
включение и отключение насоса. При высоком уровне сигнала с компаратора
(означающего необходимость включения какого либо насоса) этот сигнал
воспринимается устройством пуска электродвигателя и он запускается. При нулевом
уровне сигнала, двигатель отключается.
Для управления перепускным клапаном используется логический элемент
«или». При появлении хотя бы на одном его входе сигнала высокого уровня
производится открытие перепускного клапана. При Запуске насоса на один из двух
входов элемента «И» приходит сигнал равный единице, на втором входе сигнал
проходит через элемент задержки первоначально установленный равным единицы, как
только происходит переключение сигнала через время равное времени запаздывания
элемента на входах элемента «И» создается состояние при котором сигнал
управления перепускным клапаном равен нулю.
При включении насоса происходит второй элемент «И» выдает сигнал
на открытие перепускного клапана, а после прохода сигнала через элемент
задержки сигнал на элементе «И» становится равным нулю и перепускной клапан
закрывается.
Схема модели блока управления насосами представлена на Рис. 3.6.
Описанная в данном разделе логическая модель системы управления
представляет собой упрощенную модель поведения системы. позволяющую производить
различные эксперименты по улучшению качества управления и может быть
использована как составная часть более сложной модели системы управления ГЭС.

Рис. 3.6.
4. Проектирование системы
автоматизированного управления с использованием пакета Rational Rose
4.1
Определение требований к системе
Управление маслонапорной
установкой производится микроконтроллером, который осуществляет сбор данных о
процессе с датчиков, контролирующих параметры технологического процесса,
управление исполнительными механизмами МНУ. Контроллер МНУ получает управляющие
его работой сигналы от центрального контроллера ГЭС и передает ему данные о
состояние технологического процесса МНУ.
Контроллер ГЭС передает
полученные данные оператору, который через контроллер ГЭС способен влиять на
режим работы МНУ.
Отобразим все вышесказанное на диаграмме вариантов использования (рис.
4.1).
Рис. 4.1
4.2
Построение структуры системы
Реализация аппаратной части проектируемой системы отображена на диаграмме
топологии (Рис. 4.2). Диаграмма топологии является единой для системы в целом,
поскольку должна всецело отражать особенности ее реализации.
Рис. 4.2
Определим структуру
системы. Центральным устройством системы, функционально связанным со всеми
устройствами системы будет управляющий микроконтроллер. Данная диаграмма
представляет аппаратную реализацию системы управления. Все датчики и
исполнительные устройства разрабатываемой системы взаимодействуют с центральным
микроконтроллером, который собирает информацию о состоянии технологического процесса
в установке и обрабатывая эти данные и принимает решение о включение или
выключение необходимого в данной ситуации устройства.
Для уменьшения числа
типов рассматриваемых объектов разделим их на классы.
4.3
Создание диаграммы классов
Каждый класс может быть
представлен несколькими объектами представляющими некоторые устройства,
обладающими одинаковыми атрибутами и методами. Представим созданные классы и их
взаимодействие на диаграмме классов системы управления.
―
Main_controller – устройство данного класса
представляет собой управляющий контроллер МНУ. Взаимодействует со всеми
классами и имеет для этого ряд методов:
―
Ontimer
―
Get_status
И ряд атрибутов
представляющих собой внутренние переменные используемые контроллером при
реализации управляющего алгоритма:
―
Main_pump_resourse – содержит время наработки главного
насоса МНУ;
―
Diverter_period – содержит время открытия
перепускного клапана;
―
Pump1 – Pump3 – содержит сведения о состояние
насосов;
―
Heating – состояние нагревателя;
―
Cooling – состояние охладителя;
―
Level1- Level6
– определяют уровень
в ГА и сливном баке;
―
Pressure – показатели реального и контрольных
давлений в ГА;
―
Condensation – наличие конденсата в баке;
―
Obstructed1-
Obstructed3 –
засорение фильтров;
Air_valve – состояние пневмоклапана;
―
Alarm – флаг аварийного состояния системы;
―
Controller_GES – система управления ГЭС. Задает
параметры работы контроллера МНУ и собирает сведения о состоянии
технологического процесса.
―
Timer – устанавливается контроллером и
отсчитывает время, вырабатывает тактовый сигнал равный заданному контроллером
периоду.
―
Period – величина временного промежутка
генерации сигнала OnTimer
―
Set_timer() – операция управления таймером
―
Valve – этот класс объединяет все
электромагнитные клапаны системы. Управление объектами этого класса одинаково и
сводится к использованию двух методов класса:
―
Open()
―
Close()
То есть клапан может быть
открыт и закрыт.
―
Oil_pump – масляные насосы. Все три насоса
обладаю имеет одинаковые составные части и порядок запуска и остановки,
следовательно, можно отнести их к одному классу. Класс обладает двумя методами
– включить и отключить насос.
―
SwitchON()
―
SwitchOFF()
―
Heater – электронагреватель масла в сливном
баке. Не имеет атрибутов, но может включаться и отключаться. Следовательно,
имеет два соответствующих метода:
―
SwitchON()
―
SwitchOFF()
Приведенные ниже классы
представляют собой устройства сбора сведений о состояние технологического
процесса. Каждый подобный класс содержит один атрибут – значение контролируемой
величины и один метод – передать значение этой величины. Для контроля состояния
МНУ используются датчики представленные следующими классами:
―
Pressure_sensor
– датчик давления
масла в ГА
―
Set_timer
―
Get_pressure
―
Thermometer – датчик температуры в сливном баке
―
Temperature
―
Get_themperature
―
Analogius_level_sensor – аналоговый датчик уровня не
используется при управлении технологическим процессом установки, одна сбор
данных о состоянии уровня масла в баке и передача ее центральному контроллеру ГЭС
осуществляется контроллером МНУ, а значит необходимо реализовать класс и
описать метода работы с ним.
―
Level
―
Get_analogius_level
―
Water_sensor – датчик наличия конденсата в сливном
баке
―
Condensate
―
Get_water
―
Obstruction_sensor
– датчик засорения
масляных фильтров
―
Obstructed
―
Get_obstruction
―
Valve_position_sensor
– датчик открытия
перепускного клапана
―
Position
―
Get_obstruction
―
Discrete_level_sensor
– дискретный датчик
уровня масла
―
Level
―
Get_level
Теперь, когда были
установлены и описаны все классы, представляющие компоненты системы управления
МНУ, необходимо создать объекты представляющие каждый компонент и указать его
принадлежность к какому либо из описанных выше классов.
4.4
Взаимодействие компонентов системы
Объекты системы и их
взаимодействие удобнее всего описать используя диаграмму взаимодействия
изображенную на рисунке. На данной диаграмме изображены все устройства
представленные на диаграмме топологии и еще несколько таймеров, которые входят
в состав контроллера, но для описания алгоритма работы и улучшения
структурирования системы удобнее будет рассматривать, как объекты некого
самостоятельного класса Timer.
Все объекты системы взаимодействуют только с одним – контроллером. Мы имеем
дело с централизованной системой.
Как видно из диаграммы
взаимодействия между объектами осуществляются с использованием описанных в
предыдущем пункте методов класса, объектом которого является устройство.
Порядок взаимодействия компонентов во времени удобнее всего представить на
диаграмме последовательности взаимодействия.
4.5
Построение алгоритма работы системы
Создаваемая нами система
работает по принципу логического автомата. То есть алгоритм ее работы можно
представить как ряд определенных статических состояний в каждом из которых
осуществляются какие либо заранее известные действия, описанные программой
функционирования МНУ.
Переход из состояния в
состояние происходит при наступлении одного из условий перехода,
представляющего собой условие математической логики или наступление какого либо
события, обработка которого должна осуществляться в другом статическом
состояние системы. Возможно и осуществления безусловного перехода, если все
действия предусмотренным состоянием были выполнены.
Для рассматриваемой нами
системы управления мну можно следующие состояния описывающие весь цикл
управления маслонапорной установкой ГЭС:
―
Предпусковая
проверка системы (Sistem_test);
―
Ожидание сигнала
таймера (Idle);
―
Сбор данных
датчиков (Get_sensor_data);
―
Обработка данных,
выработка управляющих воздействий (Process_Data);
―
Остановка
рабочего процесса (Stoping_process);
Так как рабочий процесс
системы управления МНУ представляет собой последовательный переход между
статическими состояниями удобнее всего будет составить диаграмму состояний.
Запуск системы
осуществляется в точке Begin_working_circle и сразу же переходит в состояние
проверки системы Sistem_test где производится опрос датчиков системы, параметры
контролируемые данными датчиками могут не соответствовать начальным условиям
запуска и система перейдет в состояние остановки. Контролируется температура
масла в баке, его уровень, уровень и давление в ГА. Все действия производятся
при входе в состояние. Если давление в гидроаккумуляторе меньше номинального
или сработал один из аварийных датчиков уровня система перейдет в состояние
остановки. В данном случае необходимо произвести перезапуск системы после
корректировки параметров в ручном режиме.
Если не все параметры в
норме производится переход в состояние ожидания сигнала таймера. Так как
быстродействие процессора контроллера многократно превосходит время изменения
состояния МНУ, нет необходимости постоянного контроля параметров техпроцесса, а
правильнее осуществлять его периодически, по сигналу системного таймера. Для
реализации процедуры ожидания и используется состояние Idle. Как только получен сигнал от системного таймера начинается
опрос всех датчиков системы, а затем переход в состояния обработки полученных
данных и выработки управляющих воздействий для корректировки технологических
параметров.
Внутри этого состояния
выделено несколько подсостояний, каждое из которых вводится для удобства
восприятия и представляет собой алгоритм управления генерации управляющих
сигнал для исполнительных устройств.
Из состояния обработки
данных существует несколько условных переходов в режим остановки. Вызвано это
необходимостью распознать аварийный режим работы и своевременно остановить МНУ,
не допустив ее повреждения. Значения этих параметров рассматривалось при
описании контрольных параметров системы при описание установки.
Если же аварийного или
инициированного контроллером ГЭС прекращения работы не производится система
находится в состоянии обработки данных до окончания проверки всех условий
выработки управляющих воздействий.
Первым делом
обрабатываются параметры давления и если оно превышает номинальное производится
остановка включенных насосов (подпроцесс Pumping). Если же давление ниже уставки включения
компенсационного, основного или резервного насоса производится включение
соответствующего насоса, или не производится ни каких действий (в случае если
насос уже запущен).
Затем после запуска или
остановки необходимых насосов переходим в подсостояние управления
пневмоклапанном. Пневмоклапан открывается, если он был закрыт, а уровень в ГА
достиг наибольшего рабочего значения. Если же уровень упал ниже наименьшего, а
клапан был открыт. производится его закрытие.
После окончания подсостояния
управления уровнем переходим в подсостояние регулирования температуры в ГА.
Если она ниже температуры включения нагревателя, а нагреватель не включен
производится посылка сигнала на его включение. Если температура выше уровня
включения охладителя и при этом он до сих пор не запущен производится открытие
клапана охладителя.
Последним проверяются
параметры которые могут позволить своевременно диагностировать неисправность и
выявить наступление предаварийного состояния и передача состояния системы
центральному контроллеру ГЭС.
Как только все
подсостояния пройдены, система вновь попадает в состояние ожидания.
В режиме остановки МНУ производится
отключение всех исполнительных механизмов, после чего система завершает свой
рабочий цикл.
Представленный в данном
пункте алгоритм работы носит упрощенный характер, он достаточен для понимания
механизма работы системы управления МНУ. Но так как предполагаемый для
используемый в САУ МНУ контроллер не поддерживает доступные в пакете Rational Rose языки программирования, нет смысла более подробно
описывать алгоритм управления. Хотя при необходимости любое состояние системы
может быть расширено и дополнено до реализации необходимого уровня отражения
процесса управления, при этом число и структура основных состояний отражена
достаточно полно.
4.6
Создание программного кода
Программный пакет Rational Rose позволяет произвести генерацию
заготовки программного кода компьютерной модели САУ МНУ на основных языках
программирования. Произведем генерацию программного кода. на языке С++, для
этого создадим диаграмму компонентов, отражающая организацию и взаимосвязи
программных компонентов, представленных в исходном коде, двоичных или
выполняемых файлах. Связи в данном типе диаграммы представляют зависимости
одного компонента от другого и имеют специальное отображение через значок
«зависимости».
Для каждого из классов создается два файла: заголовочный (с расширением .h),
который содержит описание класса, и файл реализации (с расширением .cpp),
где содержится программная реализация методов класса.
Поэтому каждый класс на диаграмме компонентов будет представлен двумя
видами компонентов: Package Specification и Package Body. Первый вид
представляет собой определение пакета (заголовочный файл с расширением .h),
второй – тело пакета (файл с расширением.cpp).
Компоненты на диаграмме
названы также, как и классы, которые они представляют. Связями зависимости на
диаграмме показано, что для заголовочного файла контроллера требуются файлы
датчиков и устройств, которые в свою очередь используются для компиляции самих
файлов датчиков и устройств.
Программный код,
полученный с помощью программного пакета Rational Rose, помещен в приложение А.
5 Аппаратная и программная
реализация системы управления МНУ ГЭС
5.1 Аппаратная реализация управления
Подбор
аппаратной части, то есть аппаратная реализации описанной выше системы
управления должен проводиться в точном с соответствии с описанными в разделе 2,1
требованиями к системе управления МНУ. Это очень важная часть проектирования АСУ
так как непосредственно управление процессом и реализация алгоритма управления
будет производится именно выбранными нами узлами и элементами автоматики.
Следовательно,
для обеспечения качественного управления объектом и обеспечения требуемых
свойств и качеств системы управления, необходимо произвести правильный подбор
компонентов системы. Необходимо выбрать такие приборы и устройства, технические
характеристики которых позволят им выполнять предусмотренные для них
технологическим процессом функции с в рамках необходимых критериев качества.
Необходимо обеспечить совместимость узлов, то есть возможность совместного
функционирования различных устройств автоматики реализующих одну систему
управления. Для реализации этого требования, необходимо исключить устройства
допускающие возникновения наводок в других узлах и чувствительных к таким
наводкам. Соединяемые узлы должны обладать совместимым интерфейсом. Необходимо
так же учесть экономическую целесообразность применения каждого элемента в
системе.
Будим
подбирать компоненты системы исходя из соображения, что питание всей системы
будет осуществляться от единого блока питания системы управления напряжением 24
вольта.
Центральным
устройством системы управления маслонапорной установкой является
микроконтроллер с него и начнем подбор компонентов.
Выбор
платформы системы управления
Систему
управления будем строить на базе управляющего контроллера фирмы Siemens S7-300 simatic. Данная линия продукции этой фирмы включает
значительное количество различным по характеристикам управляющих процессоров
центральных модулей, модулей ввода вывода данных, измерительных преобразователей
и др.
Использование
продукции именно этой фирмы обусловлено наличием достаточного количества
разновидностей устанавливаемых модулей, позволяющих создавать на их базе
практически любые сложные системы управления.
Модули
обладают хорошей совместимостью, а расширяемая структура контроллера позволяет производить
модернизацию системы, а так же замену минимального количества элементов при
ремонте, при этом замена отдельного модуля может производится в короткие сроки,
что позволяет уменьшить простой МНУ снизив тем самым связанными с простоем
затраты.
Контроллеры
данной серии обладают хорошими показателями производительности и очень надежны.
Средняя наработка на отказ составляет около 10 лет, что вполне приемлемо для нашей
системы управления.
Фирма Siemens имеет в нашей стране
развитую дилерскую сеть, что позволяет организовать своевременную поставку
комплектующих при возникновение необходимости их замены. Хорошо организовано
сопровождение продукции в течении всего жизненного цикла изделий. Все это
упрощает обслуживание системы и значительно сокращает сроки проведения
ремонтных работ.
Серия S7 до сих пор расширяется,
и модернизируется, что дает нам уверенность в возможности дальнейшего
совершенствования системы управления путем замены отдельных модулей более
совершенными.
5.2 Описание линии контроллеров S7-300
5.2.1 Модульное построение
S7-300
построен по модульному типу. Из обширного спектра модулей можно составить
контроллер для каждой конкретной задачи управления индивидуально.
Спектр
модулей включает в себя:
―
центральный
процессор управления для различных диапазонов производительности;
―
сигнальные модули
для цифрового и аналогового ввода/вывода;
―
функциональные
модули для технологических функций;
―
сопроцессор для
коммуникационных задач;
―
блоки питания для
подключения S7-300 к напряжению питания AC 120/230V;
―
модули
подключения для соединения носителей модулей в структуре из нескольких
носителей модулей;
Все
модули S7-300 защищены кожухом по классу защиты IP 20, т. е. они герметизированы
и работают без применения вентилятора. Такое исполнение позволяет использовать
контроллер в условиях агрегатного участка ГЭС во всем диапазоне влажности
воздуха которая бывает в данном помещение.
5.2.2 Структура S7-300
S7-300
состоит из следующих модулей:
―
блок питания
(PS);
―
центральный
процессор управления;
―
сигнальные модули
(SM);
―
функциональные
модули (FM)
―
коммуникационный
процессор
Несколько
S7-300 могут взаимодействовать друг с другом при помощи кабеля шины. По
техническому заданию и при осуществлении проектирования системы управления
предполагалось, что контроллер МНУ ведет передает параметры технологического
процесса и получает инструкции по управлению МНУ от центрального контроллера
ГЭС по средствам сети PROFIBUS. Наличие данной функции у контроллеров S7-300
позволяют использовать их в нашей системе.
Для
программирования S7-300 используется программатор (PG). PG соединяется с CPU
при помощи кабеля PG.
В Таблице 5.1
представлены основные элементы системы S7-300 и выполняемые ими функции.
Таблица
5.1
|
|
Компонент
|
Функция
|
Иллюстрация
|
|
Профильная шина
Принадлежности:
элемент для прокладки
экрана
|
Является
носителем модулей для S7-300
|

|
|
Блок питания (PS)
|
Преобразует
напряжение
сети
(AC 120/230 В) в рабочее
напряжение
DC 24 V для
питания
S7-300, а также для
электропитания
цепей нагрузки DC 24 V
|

|
|
CPU
Принадлежности:
•
CPU 313/314/315/315-2DP
-
плата памяти
-
буферная батарея (как
альтернатива
-
аккумулятор
для часов
реального
времени у
CPU
315/315-2 DP)
•
CPU 314 IFM
-
буферная батарея
(альтернативно
аккумулятор
для часов
реального
времени)
-
фронтштекер
•
CPU 312 IFM
-
Фронтштекер
|
Исполняет
программу
пользователя;
подает питание 5
В
на расположенную с задней
стороны
модулей шину S7-300;
при
помощи интерфейса MPI
обменивается
информацией с
другими
абонентами сети MPI.
Кроме
того, Вы можете
использовать
CPU 315-2 DP в
подсети
PROFIBUS:
• в
качестве Master-устройства DP
• в
качестве ведомого DP
(DP-Slave)
к Master-
устройству
DP S7/M7
или
к другому Master-стройству DP.
|

|
|
Сигнальные
модули (SM)
(модули
цифрового ввода,
модули
цифрового вывода,
модули
цифрового ввода/вывода
модули
аналогового ввода
модули
аналогового вывода
модули
аналогового
ввода/вывода)
Принадлежности:
фронтштекер
|
Адаптируют
различные
уровни
технологического
сигнала
к S7-300.
|

|
|
Функциональные
модули (FM)
Принадлежности:
фронтштекер
|
Для
критичных к времени и
требующих
много памяти
задач
обработки сигнала
процесса,
таких, например, как
позиционирование
или
регулирование
|

|
|
Коммуникационный
процессор (CP)
Принадлежности:
соединительный
кабель
|
Разгружают
CPU от
коммуникационных
задач,
например,
CP 342-5 DP для
связи
с PROFIBUS–DP
|

|
|
SIMATIC
TOP connect (соединитель)
Принадлежности:
вставляемый
спереди модуль с
подсоединением
посредством
плоской
ленты
|
Для
электромонтажа
цифровых
модулей
|

|
|
Интерфейсный
модуль (IM)
Принадлежности:
соединительный
кабель
|
Соединяет
отдельные ряды
S7-300
друг с другом.
|

|
|
Кабель
шины PROFIBUS с шинным штекером
|
Соединяет
пользователей
подсети
MPI или PROFIBUS
друг
с другом
|

|
|
Кабель
PG
|
Связывает
PG/PC с CPU
|
|
|
Повторитель
RS 485
|
Для
усиления сигналов в
подсети
MPI или PROFIBUS, а
также
для соединения
сегментов
подсети MPI или
PROFIBUS
|

|
|
Программатор
(PG) или PC с
пакетом
программного
обеспечения
STEP 7
|
Для
конфигурирования,
параметрирования,
программирования
и
тестирования
S7-300
|

|
5.3 Выбор модуля центрального процессора
Из
всего разнообразия микропроцессоров серии S7-300 выбираем CPU315–2DP, так как обладает рядом необходимых
нам свойств, отличающих его от других контроллеров данной серии. Основным
отличием является возможность поддержки интерфейс сети Profibus.
CPU
315–2 DP отличаются следующими свойствами:
может
использоваться как Master-устройство DP (DP-Master) или как Slave-устройство DP
(DP-Slave)
―
48 Кбайт рабочей
памяти;
―
80 Кбайт
встроенной загрузочной памяти RAM (может быть расширена с помощью платы памяти
емкостью от 16 Кбайт до 512Кбайт, в CPU программируемы до 256 Кбайт;
―
Скорость: ок. 0,3
мс на 1000 двоичных команд;
―
При смешанной
централизованной и децентрализованной структуре в целом могут быть подключены
до 1024 байт входов и 1024 байт выходов;
―
как DP–Slave CPU
конфигурируется в STEP 7, начиная с версии 3.1 или с помощью COM
PROFIBUS начиная с версии 3.1.
Характеристики
мощности CPU 315–2 DP:
Рабочая
память (встроенная) 48 Кбайт
―
Загрузочная
память
встроенная
80 Кбайт RAM
расширяемая
до 512 Кбайт FEPROM (плата памяти)
в CPU
программируется до256 Кбайт
―
Скорость около
0,3 мс на 1000 двоичных команд
―
Число меркеров -
2048
―
Реманентность
устанавливаемая
от MB 0 до MB 255
предустановленная
16 меркерных байтов реманентны (от 0 Мб до Mб 15)
―
Количество
счетчиков - 64
―
Количество
Таймеров - 128
―
Тактовые меркеры
8 (1 меркерный байт); свободно выбираемый адрес меркерного байта (меркеры,
которые могут быть использованы получения такта прикладной программе)
―
Локальные данные
всего 1536 байт на класс приоритета 256 байт
―
Глубина вложения
8 на класс приоритета; 4
―
Интерфейс DP
―
Количество
подключаемых Slave-устройства DP 64
―
Скорость передачи
до 12 МБод
―
Память передачи
(как DP-Slave) 122 байта выходов, конфигурируемы не более, чем в 32 адресных
областях, макс. 32 байта на адресную область.
―
Расстояние
передачи данных зависит от скорости передачи. Для скорости 187,5 кБод:
расстояние
без повторителя - 50 м
расстояние
с 2 повторителями - 1100 м
расстояние
10 повторителями - 9100 м
―
Количество
цифровых входов - 1024
―
Количество
цифровых выходов - 1024
―
Количество
аналоговых входов - 128
―
Количество
аналоговых выходов - 128
―
Количество блоков
OB - 14
FB - 128
FC - 128
DB - 127
SFC - 53
SFB - 7
―
Часы - аппаратные
часы;
―
Число счетчиков
рабочего времени 1;
область
значений от 0 до 32767
дискретность
1 час
обладают
реманентностью.
Технические
данные:
―
Номинальное
напряжение 24 В постоянного тока (-10 %/+15%);
―
Потребление тока
от 24 В (на холостом ходу) тип. 0,9 A;
―
Ток включения 8
A;
―
I2t 0,4
A2с;
―
Внешняя защита
питающих проводов (рекомендация) Выключатель с предохранителями; A, тип B или
C;
―
Мощность потерь
тип. 10 Вт;
―
Размеры Ш/В/Г
(мм) 80/125/130;
―
Вес 0,53 кг (без
платы памяти и буферной батареи или аккумулятора);
―
Время буферизации
с буферной батареей мин. 1 год (при 25 °C и непрерывной буферизации CPU);
―
Время буферизации
с аккумулятором для часов реального времени тип. 120 Ч;
―
Время зарядки
аккумулятора тип. 1 ч;
5.4 Режимы DP–Master и DP-Slave
CPU
315–2 DP с помощью его второго интерфейса (PROFIBUS-DP) может использовать как
DP-Master или как DP-Slave в сети PROFIBUS–DP. CPU 315-2 DP можете
эксплуатировать как DP-Master не более, чем с 64 Slave-устройствами DP системы
S7 или других систем. CPU 315-2 DP может подсоединяться как DP-Slave к
Master-устройству DP системы S7 или к другому Master-устройству DP в соответствии
со стандартом EN.
В
нашем случае используем режим DP-Slave, так как наш контроллер получает
управляющие сигналы от контроллера ГЭС.
5.5 Выбор модулей ввода вывода микроконтроллера
5.5.1 Цифровые модули ввода/вывода
В
распоряжении программируемых контроллеров S7–300 имеется ряд цифровых модулей
для подключения датчиков, преобразователей, нагрузок и приводов. Нам необходимо
подключить 13 дискретных входов и три аналоговых входа с током 2-20 мА для
приема сигналов от установленных на маслонапорной установке датчиков. Для
управления исполнительными устройствами необходимо обеспечить девять дискретных
выходов с напряжением 24 вольта и максимальным током нагрузки до 0,5 ампера.
Реализуем
входы и выходы на базе цифровых и аналоговых модулей линии S7-300. Для обеспечения возможности
расширения системы и подключения дополнительных устройств, а также для
обеспечения возможности переключения датчика или исполнительного органа в
случае отказа входа или выхода, которому он был подключен на другой вход или выход
того же модуля, необходимо обеспечить наличие резервных входов и выходов в
количестве не менее 20% от числа элементов резервируемого типа. Так как
выпускаются модули с количеством входов/выходов кратным восьми, используем
модули следующих видов:
―
цифровой модуль
ввода – 16 дискретных входов;
―
аналоговый модуль
ввода – 8 аналоговых входов;
―
цифровой модуль
вывода – 16 дискретных выходов.
Для
обеспечения надежности системы будем использовать модули обладающие функцией
самотестирования. Для реализации алгоритма управления основанного на выработке
управляющего сигнала при измени на определенную величину какого либо
контролируемого параметра используем моду генерирующие сигнал прерывания при
изменении значений сигналов на входах.
5.5.2 Цифровой модуль ввода SM 321; DI 16 24 VDC
Для
подключения дискретных датчиков уровня, датчиков засорения фильтров и датчиков
положения перепускного клапана используем плату ввода SM 321; DI 16 24 VDC с прерываниями от процесса и диагностическими
прерываниями имеющую следующие характеристики:
―
16 входов,
изолированных группой из 16;
―
номинальное
входное напряжение 24 В постоянного тока пригоден для переключателей и
2/3/4–проводных BERO (датчиков близости);
―
2 устойчивых к
короткому замыканию источника питания датчиков на 8 каналов каждый;
―
для датчиков
возможен дополнительный внешний источник питания;
―
светодиоды
состояния ”Питание датчиков в норме”;
―
светодиод
групповой неисправности;
―
конфигурируемая
диагностика;
―
конфигурируемое
диагностическое прерывание;
―
конфигурируемое
прерывание от процесса;
―
настраиваемые
задержки ввода.
Технические
характеристики модуля
Размеры
и вес
―
Размеры Ш /В
/Г - 40 /125 /120 мм
―
Вес - 200 г
Данные,
специфические для модуля
―
Количество
каналов ввода 16
―
Длина кабеля
неэкранированного
макс. 600 м
экранированного
макс. 1000 м
Напряжения,
токи, потенциалы
―
Номинальное
напряжение на L +24 В постоянного тока
―
Защита от
обратной полярности - Да
―
Количество
входов, которыми можно управлять одновременно горизонтальная установка до 60 °C
- 16
вертикальная
установка до 40 °C - 16
―
Гальваническая
развязка
между
каналами и задней шиной - Да
между
каналами - Нет
между
напряжением на L+ и источником питания датчиков VS - Нет
―
Допустимые
разности потенциаловмежду различными контурами -75 В постоянного тока и 60 В
переменного тока
―
Изоляция
проверена при 600 В постоянного тока
―
Потребление тока
из
задней шины макс. - 55 мА
из
источника питания нагрузки L + (без источника питания датчиков VS) макс. - 40
мА
Выходы
источников питания датчиков
―
Выходы - 2
―
Выходное
напряжение при нагрузке мин. L+ (- 2,5 В)
―
Выходной ток
номинальное
значение - 120 мА
допустимый
диапазон от 0 до 150 мА
―
Дополнительное
(резервное) питание - Разрешено
―
Защита от
короткого замыкания - Да, электронная
Данные
для выбора датчиков
―
Входное
напряжение
номинальное
значение - 24 В постоянного тока
для
сигнала ”1” от 13 до 30 В
для
сигнала “0” от - 3 до 5 В
―
Входной ток при
сигнале ”1” тип. 7 мА
―
Допустимый ток
короткого замыкания макс. 1,5 мА
Время/частота
―
Внутреннее время
обработки прерывания без задержки ввода
только
для обработки прерывания макс. 250 мс
для
обработки прерывания и диагностики макс. 250 мс
―
Задержка ввода
конфигурируемая
- Да
номинальное
значение - 20 мс типовая.
―
Частота на входе
(при времени задержки 0,1 мс) <2 кГц
Размеры
и вес
―
Размеры Ш/В/Г
40/125 /120 мм
―
Вес - 190 г
Данные,
специфические для модуля
―
Количество
каналов вывода - 16
―
Длина кабеля
неэкранированного
макс. 600 м
экранированного
макс. 1000 м
Напряжения,
токи, потенциалы
―
Номинальное
напряжение на L + 24 В пост. тока
―
Суммарный ток
выходов (на группу)
горизонтальная
установка до 20 °C - макс. 4 A
горизонтальная
установка до 40 °C - макс. 2 A
вертикальная
установка до 60 °C - макс. 2 A
―
Гальваническая
развязка
между
каналами и задней шиной - Да
между
каналами группами по 8 - Да
―
Допустимые
разности потенциалов между различными контурами 75 В постоянного тока и 60 В
переменного тока
―
Потребление тока
из
задней шины макс. - 80 мА
из L+
(без нагрузки) макс. - 120 мА
―
Потери мощности в
модуле тип. 4,9 Вт
Данные
для выбора исполнительных устройств
―
Выходное
напряжение при сигнале ”1” мин. L + (- 0,8 В)
―
Выходной ток при
сигнале ”1” номинальное значение -0,5 A
допустимый
диапазон - от 5 мА до 0,6 A
при
сигнале ”0” остаточный ток - макс. 0,5 мА
―
Полное
сопротивление нагрузки от 48 Ом до 4 кОм
―
Ламповая нагрузка
макс. 5 Вт
―
Параллельное
включение 2 выходов
для
резервирования воздействия на нагрузку - Возможно (только для выходов одной и
той же группы)
для
увеличения мощности - Невозможно
―
Приведение в
действие цифрового ввода - Возможно
―
Частота
переключения
активная
нагрузка макс. - 100 Гц
индуктивная
нагрузка по IEC 947–5–1 макс. - 0,5 Гц
ламповая
нагрузка макс. - 10 Гц
―
Напряжение,
наводимое при обрыве цепи, ограничено (внутренне) до L + (- 48 В), тип.
―
Защита выходов от
короткого замыкания - Да, электронная
―
Порог реакции - 1
A, тип.
5.5.3 Аналоговый модуль ввода SM 331; AI 8 x 12Bit
В
маслонапорной установке используется три аналоговых датчика. Это датчик уровня в
баке, датчик температуры и датчик давления. Все они имеют выходной сигнал в
виде то в 4 – 20 мА. И питаются напряжением 24 в. Все датчики являются
изолированными. Для подключения таких датчиков используем модуль аналогового
ввода SM 331; AI 8 x 12Bit
Аналоговый
модуль ввода SM 331; AI 8 x 12 Bit имеет следующие характерные особенности:
―
8 входов в 4
группах каналов
―
Разрешение
измеряемого значения; устанавливается на группу (в зависимости от
установленного времени интегрирования)
9
битов + знак
12
битов + знак
14
битов + знак
―
Вид измерения,
выбираемый для группы каналов:
напряжение
ток
сопротивление
температура
―
Произвольный
выбор диапазона измерений на группу каналов
―
Программируемая
диагностика
―
Программируемое
диагностическое прерывание
―
Два канала с
контролем границ
―
Программируемое
прерывание при переходе границы
―
Гальваническая
развязка с CPU
―
Гальваническая
развязка с напряжением нагрузки (не для 2–проводного преобразователя)
Разрешение
измеряемой величины непосредственно зависит от выбранного времени
интегрирования. Иными словами, чем больше время интегрирования для канала
аналогового ввода, тем больше будет разрешение измеряемой величины.
Технические
данные модуля
―
Размеры Ш / В / Г
- 40 / 125 / 120 мм
―
Вес - 250 г
―
Количество входов
- 8
с
резистивным датчиком - 4
―
Длина кабеля
(экранированного) макс. 200 м
Напряжения
и токи
―
Номинальное
напряжение на L + 24 В пост. тока
―
Защита от
обратной полярности - Да
―
Источники питания
преобразователей
защита
от короткого замыкания - Да
ток постоянной
величины для резистивного датчика - тип. 1,67 мА
―
Гальваническая
развязка
между
каналами и задней шиной - Да
между
каналами и напряжением на L+ - Да
―
Допустимая
разность потенциалов между входами и MANA (UCM) при сигнале = 0 В 2,5 В пост.
тока
―
Потребление тока
из задней шины - макс. 60 мА
из
источника напряжения L + (без нагрузки) - макс. 200 мА
―
Потери мощности в
модуле тип. 1,3 Вт
Данные
для выбора датчиков
―
Ток
± 3,2
мА;
± 10
мА;
± 20
мА;
от 0
до 20 мА;
от 4
до 20 мА;
―
Сопротивление
150
Ом /10 МОм;
300
Ом/10 МОм;
600
Ом/10 МОм;
―
Подключение
датчиков для измерения тока
как
2-проводных преобразователей - Возможно
как
4-проводных преобразователей - Возможно
5.6 Выбор источника питания системы управления
Питание
контроллеров датчиков и пусковых устройств исполнительных механизмов
производится от одного блока питания напряжением 24 В. По этому все датчики,
пускатели и реле выбираем именно с этим напряжением питания. Блок питания
должен питаться от сети собственных нужд ГЭС переменным током частотой 50 Гц и
напряжением 220 В.
Наличие
единого блока питания позволяет упростить систему резервного питания САУ МНУ. В
качестве источника питания будем использовать PS 307; 10 A из комплекта S7-300 с номинальным током нагрузки 10
А. Такой ток позволяет осуществлять питание электрическим током не только
контроллер, но и датчики и линий управления исполнительных механизмов.
Обеспечивает возможность развивать и модернизировать систему, подключая к ней
новые устройства.
Источник
питания PS 307; 10 A имеет следующие отличительные характеристики:
―
выходной ток 10 A
―
выходное
напряжение 24 в пост. тока; защита от короткого замыкания и обрыва цепи
―
подключение к
однофазной системе переменного тока (входное напряжение 120/230 В перем. тока,
50/60 Гц)
―
надежная
электрическая изоляция в соответствии с EN 60 950
―
может быть
использован как источник питания нагрузки.
Технические
данные
Размеры
и вес
―
Размеры Ш / В / Г
- 200 / 125 / 120 мм
―
Вес 1,2 кг
Номинальные
входные данные
―
Входное
напряжение номинальное значение 120/230 В переменного тока
―
Частота системы
питания
Номинальное
значение - 50 Гц или 60 Гц
Допустимый
диапазон - от 47 Гц до 63 Гц
―
Номинальный
входной ток
при
230 В -1,7 A
при
120 В - 3,5 A
―
Пусковой ток (при
25°C) 55 A
Номинальные
выходные данные
―
Выходное
напряжение
Номинальное
значение - 24 В пост. тока
Допустимый
диапазон - 24 В ± 5 %, защита
―
Время нарастания
от размыкания цепи - макс. 2,5 с
―
Выходной ток
Номинальное
значение 10 A, нельзя включать в параллельные конфигурации
―
Защита от
короткого замыкания Электронная, не фиксирующая, от 1,1 до 1,3 × IN
―
Остаточные
пульсации макс. 150 мВ.
Другие
параметры
―
Класс защиты по
IEC 536 (DIN VDE 0106, часть 1) I, с проводом защитного заземления
―
Изоляция
Номинальный
уровень изоляции (24 В на L1) - 250 В переменного тока
Проверено
при - 2800 В постоянного тока
Надежность
изоляции по DIN VDE 0106, часть 101
―
Реакция на сбои
питания (при 93 и/или 187 В)- мин. 20 мс
Темп
повторения - мин. 1 с
―
К. п. д. 89 %
―
Входная мощность
270 Вт
―
Потери мощности
тип. 30 Вт
5.7 Выбор дискретных датчиков
5.7.1 Дискретные датчики уровня
Для
контроля уровней а ГА и сливном баке будем использовать наиболее надежные и
дешевые емкостные сигнализаторы уровня . Для сокращения числа разновидностей
датчиков все шесть установленных на МНУ датчиков будут Pointek CLS фирмы Siemens. При достижение уровнем масла в ГА
или сливном баке места установки какого либо датчика происходит изменение
уровня вырабатываемого им сигнала с уровня «логического нуля» на уровень соответствующей
«логической единице». Для всех используемых в установке дискретных датчиков
уровни «логического нуля» и «единицы» составляют соответственно от - 3 до 5 В и
от 13 до 30 В.
Датчики
Pointek CLS обладают рядом характеристик позволяющих использовать их в нашей
системе управления. Главным показателем является срок службы датчика – 25 лет.
Максимальное давление жидкости составляет 10 МПа что дает возможность
использовать датчики в Гидроаккумуляторах с давлением до 9 МПа. То есть на всех
МНУ с воздушным гидроаккумулятором.
Технические характеристики
―
Температура
контролируемой среды: от –40 до +400°С
―
Рабочее
давление: до 100 бар
―
Воспроизводимость:
2 мм
―
Материал
зонда: Ryton, Teflon, Kynar, нержавеющая сталь, керамика
―
Степень
защиты корпуса: IP65
―
Крепление
датчика: резьбовое и сантехническое Tpi_Clamp
―
Источник
питания: от 12 до250 В
―
Минимальная
диэлектрическая постоянная среды: 1,5
5.7.2 Датчики засорения фильтра
Для
определения момента засорения масляного фильтра применяются индукционные
датчики положения. Конструкция фильтров такова, что при засорении фильтрующего
элемента давление на входе в фильтр возрастает. Когда оно достигает
определенного уровня, происходит открытие перепускного канала, по которому
масло движется в обход фильтрующего элемента исключая тем самым прекращение
подачи масла через фильтр при его засорении. Датчиком контролируется
перемещение перепускного клапана и как только оно достигает величины, при
которой процент не очищенного масла превышает максимально возможный, датчик
вырабатывает сигнал равный логической единице. Применяемые датчики положения -
ВК 1-31-N-5-400-ИНД-3В производства фирмы ТЕКО
г. Челябинск.
Технические
характеристики
―
рабочее
напряжение 10-30 В;
―
ток максимальный
400 мА;
―
номинальное
расстояние включения 5мм.
Данные
датчики достаточно надежны, не требуют обслуживания и имеют не высокую
стоимость. В случае отказа возможна их быстрая замена.
5.7.3 Датчик наличия конденсата
В
качестве датчика наличия конденсата применяется дискретный емкостной датчик
уровня. Датчик РОС-168 производства фирмы ТЕКО г. Челябинск аналогичный по
конструктивному исполнению и большинству свойств описанным выше датчикам уровня
фирмы Siemens, но он настроен на работу с
диэлектрической проницаемостью воды. По этому он может быть погружен в масло но
при этом не передаст сигнал высокого уровня. который генерируется только при
достижение уровня воды в сливном баке выше уровня установки датчика. Данный
датчик может питаться только постоянным током напряжения 16-30 В. Он достаточно
надежен и не требует профилактического обслуживания.
5.7.4 Датчики положения перепускных клапанов
Для
контроля положения перепускных клапанов насосов устанавливаются индукционные
датчики положения ВК 1-31-N-5-400-ИНД-3В.
Такие же датчики используемым в фильтрах очистки масла. Уровень сигнала равный
логической единице вы при открытии перепускного клапана.
5.8 Аналоговые датчики
Как
уже упоминалось ранее, все используемые аналоговые датчики являются датчиками
тока с диапазоном 4-20 мА. Они подключаются к блоку аналогового ввода
контроллера витой парой. Все датчики являются изолированными, то есть
сигнальные провода не соединятся в датчике с землей.
5.8.1 Датчик давления в ГА
В качестве датчика давления масла используем SITRANS Z фирмы Siemens.
Датчики этой серии относительно недорогие, очень надежные и обладают
достаточной точностью. Датчик состоит из тонкоплёночной измерительной ячейки с
керамической мембраной и электронной схемы, которые встроены в корпус из
нержавеющей стали. Наружная монтажная резьба — G1/2A, внутренняя — G1/8A.
Электрическое подсоединение осуществляется через угловое штепсельное соединение
типа А в соответствии с DIN 43650, имеющее кабельный сальник. В эксплуатации
преобразователи не требуют технического обслуживания, кроме периодической
проверки нуля диапазона. Срок службы более 25 лет.
Технические характеристики
―
Диапазон
измерения: от 0 до 40 МПа
―
Выходной
сигнал: 4-20 мА
―
Напряжение
питания: от 10 до 36 В пост. тока
―
Максимальная
погрешность измерения: не более 0,25% от полной шкалы
―
Диапазон
рабочих температур: –25…+85°С
―
Температура
хранения: –50…+100°С
―
Температура
контролируемой среды: –30…+120°С
―
Материал
измерительного элемента: Al2O3_96%
―
Материал
измерительной камеры: нержавеющая сталь
―
Масса:
около 0,25 кг
―
Степень
защиты корпуса IP65
5.8.2 Датчик температуры в сливном баке
Назначение: преобразователь термоэлектрический
ПТЭ-408 ТермПром предназначен для измерения температур жидких и
газообразных химических неагрессивных сред, а также агрессивных, не разрушающих
материал защитной арматуры.
―
Диапазон
измеряемых температур: -40…200°C;
―
Рабочий спай: изолированный;
―
Средний срок
службы не менее
8-ми лет;
―
тип сигнала ток
4-40 мА;
Данный датчик дешев не
требует обслуживания во всего периода эксплуатации.
5.9 Подбор коммутационное оборудование
Вырабатываемые
микроконтроллером сигналы управления напряжением 24 В и током не более 0,5 А не
могут быть использованы для непосредственного питания исполнительных органов
МНУ. Для питания мощных нагрузок необходимо использовать специальные устройства
обеспечивающие коммутацию токов высокого напряжения и большой мощности. Это
могут быть электромагнитные реле или полупроводниковые устройства. В
современном коммутационном оборудовании, как правило, уже имеются устройства
защиты цепей от короткого замыкания и устройства контролирующие работу
устройства, способные передавать сигналы при возникновении аварийных ситуаций.
Правильно
подобрав коммутационное оборудование можно существенно снизить максимальный ток
потребляемой системы и продлить срок службы основных элементов. Снизить затраты
на техническое обслуживание.
5.9.1 Устройство плавного пуска электродвигателей
Управление
электродвигателями производится с помощью устройств плавного пуска. При подаче
контроллером сигнала на включение электродвигателя устройство постепенно
увеличивает напряжения питания электродвигателя до номинального. Благодаря
тому, что ток возрастает плавно и при включении двигателя его значение не
велико происходит плавный запуск электродвигателя. В результате исключается
крайне тяжелый пусковой режим работы электродвигателя и снижается значение
среднего потребляемого тока двигателем тока и снижает значение максимальной
нагрузки на электрические сети. Управление двигателями насосов будем
производить с помощью устройств плавного пуска SIRIUS 3RW30 фирмы Siemens. Внешний вид представлен на рисунке (Рис.
5.7).
Устройство
предназначено для управление трехфазными асинхронными двигателями мощностью до
55 кВт (ток до 100 А при 400 В). Имеет следующие технические характеристики:
―
функции плавного
разгона и останова электродвигателей
―
раздельное
задание времени разгона и останова (0...20 с)
―
установка общего
значения напряжения включения и выключения (40...100% от номинала рабочего
напряжения)
―
напряжение
управления 24 В и 110/220 В пост и переменного тока
―
имеет 3
потенциометра для задания параметров
―
имеет
сигнализацию режима работы
Диапазон
рабочих температур: –25…+60°С
Применение
подобных устройств пуска электродвигателей повышает срок службы
электродвигателей и насосов. Повышает надежность системы и межремонтный период,
так как производится коммутация меньших токов и отсутствуют механические
контакты (не достаточно надежное устройство).
5.9.2 Вспомогательный контактор
Для
управления электоклапанами насосов, пневмоклапанном и клапаном охладителя
используем контактор фирмы Siemens SIRIUS 3RH11.
Используя
всего один контактор с расширением до восьми групп контактов можно обеспечить
управление всеми электромагнитами клапанов системы. Используемый контактор
легко заменяется при истечение срока службы и не требует обслуживания. Наличие
устройств ограничивающих коммутационные токи позволяет продлить срок службы
контактов.
Технические
характеристики
―
Максимальный
коммутируемый переменный ток 6 А при 230 В
―
Высокая
надежность контактов при малых напряжениях и токах
―
4
группы контактов в базовом варианте с возможностью расширения до 8
―
Варианты
исполнения с винтовыми и пружинными клеммами
―
Ограничение
коммутационных перенапряжений с помощью встроенных RC звеньев, диодов или
варисторов.
5.10 Разработка алгоритма программы управления маслонапорной
установкой
5.10.1 Специфика программирования микроконтроллеров Siemens
Для
программирования микроконтроллеров фирмы Siemens S7-300 SIMATIC
необходимо обладать определенными аппаратными и программными ресурсами,
предусмотренными требованиям среды программирования Step7. Данные ресурсы не доступны в рамках работы над
данным дипломным проектом. По этому не возможно представить работоспособную и
отлаженную программу для микроконтроллера. Кроме того, реализация программы
требует огромных затрат рабочего времени. Однако как основу будущего
программного модуля можно представит алгоритм функционирования МНУ. В дальнейшем,
при расширении алгоритма возможно будет достаточно полно описание работы
системы управления МНУ. А затем на основе полученного алгоритма можно используя
средства Step7 осуществить кодировку программных
модулей основной программы и подключаемых модулей реализующих программу
управления маслонапорной установкой ГЭС.
5.10.1 Описание алгоритма работы мну
Для удобства восприятия и
повышение уровня структурирования программы алгоритм управления был разделен на
основную управляющую программу и ряд подпрограмм вызываемых основной программой
и описывающих поведение системы в определенных, многократно повторяющихся в
течении рабочего цикла состояний.
Такая организация
позволяет проводить модернизацию отдельных модулей, делает возможным создание
различных модулей описывающих поведение системы в одних и тех же ситуациях, для
случаев различных конфигураций системы и внешних условий. Кроме того
структурированная программа удобнее для восприятия. Значительно упрощается
визуализация алгоритма в виде блок-схемы.
Далее приведем описание
модулей составляющих программу управления работой маслонапорной установки.
5.10.2
Основная программа управления
Основной алгоритм
представляет собой последовательность действии по управлению маслонапорной
установкой с момента получения команды на запуск до момента остановки.
Блок-схема алгоритма представлена на рисунке Рис. О.
Сразу же после запуска и
завершения пускового тестирования САУ МНУ запрашивает у контроллера ГЭС
параметры работы. Температурные уставки, значения давлений в ГА при которых
включаются насосы.
Затем последовательно
производится опрос датчиков системы, перед пуском в ручную необходимо было
накачать до номинального давления масло в гидроаккумулятор и скорректировать
его уровень, если начальные условия не соответствуют расчетным, система
переходи в режим аварийной остановки, передав перед этим контроллеру ГЭС
сообщение о причинах остановки (код ошибки).
Снимаются показания
датчика температуры и если она находится за пределами нормальной работы,
производится запуск подпрограммы корректировки температуры в сливном баке.
После приведения параметров
системы в норму МНУ передает сообщение о готовности к запуску. Запускается
программа выбора основного и резервного насосов. У основного насоса имеется
счетчик наработки, который ведет учет времени работы двигателя насоса. По
достижении счетчиком значения соответствующего 100 часам наработки производится
переключение насосов, т.е основной становится резервным и наоборот.
Затем если не установлен
флаг S – остановки МНУ, начинается рабочий
цикл.
Производится опрос
датчика давления и последовательное сравнение текущего значения давления в ГА с
уставками включения компенсационного, основного и резервного насоса, если
давление меньше уставки включения насоса и насос находится в неработающем
состоянии производится запуск подпрограммы включения насосов. Затем
производится запуск подпрограммы опроса датчиков. В случае выхода какого либо
из параметров на аварийный уровень производится установка флага S.
Если флаг установлен
система переходит в режим аварийной остановки. Затем производится запрос
системы управления ГЭС на остановку МНУ, если в этом нет необходимости, система
управления МНУ продолжает рабочий цикл.
Производится новый опрос
уровня давления, и если он равен номинальному производится остановка включенных
насосов. Система переходит в режим выбора основного и резервного насосов, а
описанный выше цикл вновь повторяется с этой точки. В противном случае
происходит возврат в точку опросов датчиков, так как во время работы насосов
нет смысла переключать между основным и резервным.
Если был установлен флаг
остановки система переходит в режим остановки и контроллер отключает все
исполнительные устройства.
5.10.3 Подпрограмма
опроса датчиков МНУ
Подпрограмма
опроса датчиков вызывается периодически основной программой. Она выполняет
функцию сбора и контроля данных о состоянии технологического процесса,
инициирует запуск подпрограмм корректировки уровня в ГА и температуры масла в
сливном баке. В случае выхода какого либо параметра за пределы, предусмотренные
рабочим, режимом генерируется сообщение с кодом ошибки. И если значение уровня
масла, давления или температуры достигают уровня, при котором дальнейшая
эксплуатация не возможна, происходит запуск режима аварийной остановки МНУ.
При
входе в подпрограмму опроса датчиков производится контроль аварийных уровней и давления,
в случае если какой либо из сигналов не соответствует норме устанавливаться
флаг аварийной остановки и передается код ошибки центральному контроллеру ГЭС и
возврат в основную программу.
Если
же аварийные параметры в норме, производится контроль переполнения сливного
бака, засорения фильтров и при обнаружении несоответствия значений с
нормальными выдается сообщения о неполадке МНУ.
Производится
контроль уровня в гидроаккумуляторе и температура в сливном баке. Если
параметры отклоняются от нормального уровня производится запуск соответствующей
корректирующей программы.
Перед
завершением работы подпрограммы опроса датчиков все контролируемые параметры
передаются управляющему контроллеру ГЭС и могут быт использованы для
планирования его работы.
Контроль
параметров системы необходимо производить с достаточной частотой, чтобы не
пропустить момент изменения параметра. Лучшим вариантом будет вызывать эту
подпрограмму по прерываниям вырабатываемым модулями сбора денных от датчиков
при измени входного сигнала. Блок-схема алгоритма подпрограммы представлена на рисунке
1 приложения б.
5.10.4 Подпрограмма запуска компенсационного насоса
При
падении давления в ГА до уровня включения компенсационного насоса происходит
запуск подпрограммы его включения. Блок-схема алгоритма функционирования
подпрограммы представлена на рисунке 2 приложения б. При запуске подпрограммы
производится контроль состояния насоса, если он уже запущен подпрограмма
прекращается, а если он отключен начинается запуск.
Сбрасывается
таймер времени открытия перепускного клапана и таймер запускается и открывается
перепускной клапан. Одновременно происходит запуск электродвигателя насоса.
Производится контроль положения перепускного клапана и если он находится в
неправильном положении происходит отключение насоса и выход из подпрограммы. По
истечении времени установленного для разгрузки насосов производится закрытие
перепускного клапана. Насос переходит в рабочий режим нагнетания масло в ГА.
Если запуск насоса не удался генерируется сообщение с кодом ошибки.
5.10.5 Подпрограмма запуска основного насоса
Аналогична
описанной выше, и отличается только наличием функций управления контроля
датчика наработки.
5.10.6 Подпрограмма запуска резервного насоса
Подпрограмма
запуска резервного полностью аналогична подпрограмме запуска компенсационного
насоса.
5.10.7 Подпрограммы отключения насосов
Отключаются
только запущенные насосы, при достижении в ГА номинального значения давления.
Алгоритмы отключения для всех насосов аналогичны, только при отключении основного
насоса производится дополнительно остановка счетчика наработки насоса.
Блок-схемы алгоритма работы подпрограмм отключения насосов представлены на
рисунке рисунке 3 приложения б.
После
входа в подпрограмму производится контроль состояния насоса, если он отключен
подпрограмма завершается, иначе производится открытие перепускного клапана и
отключение электродвигателя по истечении времени задержки перепускной клапан
закрывается. Центральному контроллеру ГЭС передается сообщение об остановке
насоса.
После
чего производится возврат в место вызова подпрограммы.
5.10.8 Подпрограмма контроля и корректировки уровня масла в
ГА
При
вызове подпрограммы корректировки уровня масла в ГА производятся следующие
действия, если уровень в ГА выше верхнего уровня и пневмоклапан закрыт
производится его открытие. Если установлено, уровень ниже нижнего и
пневмоклапан открыт, производится его закрытие. Во всех других случаях ни каких
действий не производится. Блок-схема алгоритма работы подпрограмм представлена
на рисунке 5 приложения б вверху.
5.10.9 Подпрограмма контроля и нормализации температуры в сливном баке
Подпрограмма
запускается при выходе температуры масла за диапазон предусмотренный рабочим
режимом. Блок-схема алгоритма работы подпрограмм представлена на рисунке 5 приложения
б внизу. Сразу после запуска подпрограммы проверяется не приняла ли температуры
масла в сливном баке аварийное значение. Если это произошло производится
передача сообщения с кодом ошибки, устанавливается флаг аварийного состояния и
управления передается в точку вызова подпрограммы.
При
температуре лежащей в рабочем диапазоне производится проверка необходимости
включения охладителя или нагревателя или их отключения. В случае если
устройства не запущены (не отключены) производится их запуск (отключение).
Подпрограмма завершена, управление передается назад вызывавшему модулю.
6.1 Пути снижения затрат за
счет внедрения системы
Внедрение автоматической системы управления маслонапорной
установкой гидроэлектростанции решает следующие задачи
-
Полностью
автоматическая система управления маслонапорной установкой не требует участия
человека в ее рабочем цикле, вследствие чего происходит высвобождение рабочих
занятых на ГЭС;
-
Снижение частоты
и трудоемкости обслуживания;
-
Повышение
надежности системы управления.
-
уменьшение время
простоя связанного с технологическим обслуживанием.
Специфика работы ГЭС предусматривает непрерывный цикл
производства. Без функционирования МНУ невозможна работа всей
гидроэлектростанции, а простой даже малой ГЭС мощностью 5 МВт в течения суток
приносит убытки в сумме более 100000 рублей только по причине не
недопроизводства электроэнергии. По этому снижение периодичности обслуживания
МНУ и ее отказоустойчивость способно снизить убытки, возникающие по причине
простоя оборудования.
В настоящее время строятся электростанции управляемые всего
лишь одним человеком, применения автоматической системы в данном случае
обязательное условие функционирования подобной ГЭС.
Как показывает многолетняя практика эксплуатации
маслонапорных установок аварийная остановка ГЭС связанная с отказом
традиционной системы управления возникает 2-3 раз в году, при этом простой
составляет от 4 до 24 часов. Для скорейшего восстановления работоспособности
МНУ требует постоянное присутствие ремонтного персонала на электростанции. А
это очень дорого обходится, так как персонал практически не задействован, ведь
проведения обслуживания механизмов производится в установленное время и требует
не более 400 часов рабочего времени в год. Упрощение обслуживания и применение
функций самодиагностики позволяют быстро выявлять причину отказа, а модульный
принцип построения заменять неисправные компоненты системы. Применение системы
раннего оповещения о возникающих неполадках позволяет своевременно их устранить
и не останавливать ГЭС по причине аварии.
До внедрения АСУ, оператору приходилось периодически
контролировать работу установки и производить корректировку ее работы.
Неисправности выявлялись специально подготовленным специалистом в течении
длительного времени, и устранялись как правило в течение суток. Неисправность
определялась как правило после аварийной остановки ГЭС. Не возможно было
диагностировать неполадки во время работы системы управления. Требовалось
содержать ремонтную бригаду и нескольких операторов.
Теперь же весь контроль работы МНУ, производится с
центрального пульта управления ГЭС, причем при наступлении предаварийной
ситуации оператор своевременно информируется, что позволяет ему устранить
неполадку, диагностика была произведена системой управления до наступления аварийной
ситуации. Что позволяет уменьшить количество персонала задействованного для
управления ГЭС и ее ремонта. Для обслуживания нескольких ГЭС может быть создана
одна бригада ремонтников, которая обслуживала бы несколько электростанций.
Управление маслонапорной установкой требовало постоянное
присутствие на станции, как минимум одного оператора, который бы контролировал
работу МНУ и обслуживал ею.
Внедрение новой АСУ позволило оказаться от дополнительного
оператора ГЭС, так как управление и контроль параметров ведется контроллером, а
форма выходной информации позволяет сосредоточить все контрольные данные на
панели рабочего места одного оператора. Такой подход позволяет централизовано
получать и обрабатывать всю информацию о работе электростанции одним человеком,
что повышает качество принимаемых им управляющих решений.
6.2 Технико-экономические показатели эффективности от внедрения новой
системы автоматизации
В условиях бурного развития техники важным является вопрос
внедрения новых разработок в производство. Поэтому необходим точный расчет
затрат на покупку и монтаж предлагаемого на рынке оборудования, что позволит
сделать правильный его выбор.
6.2.1 Экономия в заработной плате высвобождаемых рабочих
В нашем случае происходит высвобождение 1 оператора и 1
вспомогательного рабочего производящего обслуживание АСУ.
Среднегодовая заработная плата оператора составляет 81600
руб. (6800руб * 12).
Среднегодовая заработная плата вспомогательного рабочего
42000 руб. (3500руб. * 12)
Экономию в заработной плате высвобождаемых в результате внедрения
АСУ ТП работников можно определить по формуле:
Зосв = k1k2k3 ּ Зср.р. ּ Nосв.р. + k4k2k3 ּ Зср.вспом ּ Nосв.вспом;(6.1)
где k1k4 – коэффициенты премиальной надбавки
соответственно для рабочих и инженерно-технических работников (ИТР), равны 1,4;
k2 – коэффициент, учитывающий
дополнительную зарплату, равен 1,2;
k3 – коэффициент отчислений на
социальное страхование, равен 1,356;
Nосв.р – число высвобождаемых рабочих, 1;
Зср.вспом – средняя годовая заработная палата
высвобождаемых вспомогательных рабочих, равна 42000 ;
Nосв.итр – число высвобождаемых
вспомогательных рабочих, равно 1.
Зосв = 1,4 ּ1,2 ּ1,365 ּ81600 ּ 1 + 1,4
ּ1,2 ּ1,365 ּ42000 ּ1;
Зосв =
187125,12+ 96314,4 = 283439,52.
Годовая экономия по заработной плате составляет 283439,52
руб.
Стоимость оборудования, а также амортизационные отчисления на
данное оборудование представлены в таблице 6.1.
Годовые затраты на ремонтные работы КТС (комплекса
технических средств) АСУ ТП рассчитываются по формуле:
 ;(6.2)
;(6.2)
где pi – число
условных единиц ремонтной технологического оборудования, равно 22;
Cpi – стоимость условной единицы
ремонтной сложности, равно 800 руб.
 .
.
Годовые затраты на ремонтные работы КТС составляют 17600 руб.
6.2.4 Годовые затраты на электроэнергию
Годовые затраты на электроэнергию,
потребляемую КТС (комплекса технических средств) АСУ ТП, рассчитываются по
формуле:
 ;(6.3)
;(6.3)
 - максимальная мощность внедряемого комплекса, равна 5,377 кВт;
- максимальная мощность внедряемого комплекса, равна 5,377 кВт;
 - стоимость 1 кВт-ч электроэнергии, равно 1,7 руб.;
- стоимость 1 кВт-ч электроэнергии, равно 1,7 руб.;
Таблица 6.1
|
Наименование
|
Число единиц
|
Стоимость единицы, руб.
|
Всего, руб.
|
Срок службы, лет
|
Норма амортизации, %
|
Сумма амортизационных отчислений,
руб.
|
Потребляемая мощность, кВт
|
|
1
|
2
|
3
|
4
|
|
5
|
6
|
7
|
|
Датчик температуры
|
1
|
6810
|
6810
|
15
|
6,6
|
494,4
|
0,002
|
|
Контроллер
|
1
|
284000
|
284000
|
20
|
5
|
15620
|
0,070
|
|
Датчик уровня дискретный
|
6
|
1200
|
7200
|
10
|
10
|
132
|
0,03
|
|
Датчик уровня аналоговый
|
1
|
3400
|
3400
|
10
|
10
|
374
|
0,02
|
|
Датчик конденсата
|
1
|
800
|
800
|
6
|
16,6
|
146,6
|
0,006
|
|
Датчик
положения
|
6
|
250
|
1500
|
6
|
16,6
|
275
|
0,006
|
|
Датчик давления
|
1
|
6200
|
6200
|
9
|
11,1
|
756,8
|
0,008
|
|
Контактор
|
1
|
2600
|
2600
|
10
|
10
|
314
|
0,015
|
|
Пускатель
|
1
|
800
|
800
|
12
|
8,3
|
732,6
|
0,02
|
|
Устройство плавного
пуска
|
3
|
7100
|
21300
|
20
|
5
|
388,5
|
5,2
|
|
ИТОГО
|
22
|
|
334610
|
|
|
19380,5
|
5,377
|
 - коэффициент берется в зависимости от количества смен работы
линии, в моем случае 3 смены, равен 2,9;
- коэффициент берется в зависимости от количества смен работы
линии, в моем случае 3 смены, равен 2,9;
 - количество рабочих часов в году, равно 2920.
- количество рабочих часов в году, равно 2920.
 -
коэффициент определяющий среднюю потребляемую мощность.
-
коэффициент определяющий среднюю потребляемую мощность.
 .
.
Годовые затраты на электроэнергию потребляемую КТС составляют
15481 руб.
6.2.5 Годовые амортизационные отчисления на оборудование
Годовые амортизационные отчисления рассчитываются по формуле:
 ;(6.4)
;(6.4)
где  - средний коэффициент
амортизационных отчислений;
- средний коэффициент
амортизационных отчислений;
 - коэффициент, учитывающий расходы
на транспортировку, монтаж и наладку КТС АСУТП, равен 0,1;
- коэффициент, учитывающий расходы
на транспортировку, монтаж и наладку КТС АСУТП, равен 0,1;
Проведем расчет КТС для датчика температуры.
 .
.
Аналогичные расчету проведем для всех компонентов системы,
результаты представлены в Таблице 6.1.
 - стоимость КТС АСУ ТП, равна
19380,5 руб.
- стоимость КТС АСУ ТП, равна
19380,5 руб.
Годовые амортизационные отчисления на установленное
оборудование составляют 19380,5 руб.
6.2.6 Годовые затраты на эксплуатацию
Годовые затраты на эксплуатацию КТС (комплекса технических
средств) АСУ ТП рассчитываются по формуле:
 ;(6.5)
;(6.5)
где  - годовая заработная плата
рабочих, обслуживающих КТС АСУ ТП, равна 144000 (1 оператор);
- годовая заработная плата
рабочих, обслуживающих КТС АСУ ТП, равна 144000 (1 оператор);
 - годовые
амортизационные отчисления, равны 19380,5 руб.;
- годовые
амортизационные отчисления, равны 19380,5 руб.;
 - годовые затраты на
ремонтные работы КТС, равны 17600 руб.;
- годовые затраты на
ремонтные работы КТС, равны 17600 руб.;
 - годовые затраты на
электроэнергию потребляемую КТС, равны 15481 руб.
- годовые затраты на
электроэнергию потребляемую КТС, равны 15481 руб.
 .
.
Годовые затраты на эксплуатацию технических средств
составляют 196461 руб.
6.2.7 Экономический эффект за счет уменьшения количества отказов МНУ
Известно, что среднее годовое время простоя ГЭС, в связи с
отказом САУ МНУ традиционного тапа составляет Tпрост = 40 часов. Разработанная система должна простаивать как
минимум на 60% меньше. И время простоя для нее составляет менее 16 часов год.
Получаем дополнительное время работы ГЭС 24 часа в год. Это связано с большей
надежностью разработанной системы управления МНУ предполагается использовать на
ГЭС мощностью Pном =15 МВт. Следовательно, зная
стоимость одного кВтч () электроэнергии производимой
ГЭС =1,7 руб. И среднегодовой
коэффициент загрузки электростанции Кз (0,7) можно посчитать
экономическую выгоду от повышения надежности МНУ, Рассчитаем ее по формуле:
 ;
;
 .
.
Годовая экономия за счет уменьшения
количества отказов составляет 428400 руб.
6.2.8 Экономический эффект за счет уменьшения сроков ремонтных работ
Уменьшение трудоемкости обслуживания сокращает сроки
проведения плановых ТО. При ежегодном проведении работ по обслуживанию
затрачивается на 36 часов меньше времени, чем с традиционной системой
управления МНУ. Это связано с уменьшением числа объектов, требующих
обслуживание и упрощение его проведения.
Годовая экономия за счет уменьшения объема ремонтных работ
можно рассматривать как появление дополнительного рабочего времени, при котором
ГЭС будет вырабатывать электрический ток. Определяется по формуле:
 ; (31)
; (31)
Тдоп - дополнительное рабочее время
связанное с уменьшением сроков планового обслуживания. Кз –
коэффициент средней годовой загрузки ГЭС 0,7. Рном –
номинальная мощность ГЭС.
 ;
;
Экономия за счет сокращения сроков технического обслуживания
МНУ составляет 642600 рублей в год.
6.2.9 Прочая экономия
Уменьшение затрат на
обучение персонала, сокращение числа обслуживаемых элементов и другие
положительные эффекты являются менее значимыми на уровне описанной выше
экономии от увеличения продолжительности рабочего времени однако они так же
проявляются.
6.2.10 Годовая экономия от внедрения АТК
В общем случае с учетом всех перечисленных выше факторов
годовая экономия от внедрения АТК рассчитывается по формуле:
Эг=Эп1+ Эп2+ Зосв -СГАТК;(6.8)
 - годовые затраты на
эксплуатацию КТС, равны 196461 руб.
- годовые затраты на
эксплуатацию КТС, равны 196461 руб.
Эг=642600
+428400+283439,52- 196461 = 1157978
Годовая экономия составляет 1157978 руб.
Годовой экономический эффект от
внедрения автоматизации определяется по формуле:
 ; (6.9)
; (6.9)
где  - нормативный коэффициент
экономической эффективности капитальных вложений для вычислительной техники
обратный по отношению к сроку окупаемости (
- нормативный коэффициент
экономической эффективности капитальных вложений для вычислительной техники
обратный по отношению к сроку окупаемости ( ). В
условиях рыночной экономики, по мере ускорения научно-технического прогресса,
нормативные сроки окупаемости, при производстве электронно-вычислительной
техники последовательно снижаются – 4; 3; 2,5 и 2 года. Это вызвано быстрым
старением компьютеров, поэтому для различных отраслей промышленности =0,33;
). В
условиях рыночной экономики, по мере ускорения научно-технического прогресса,
нормативные сроки окупаемости, при производстве электронно-вычислительной
техники последовательно снижаются – 4; 3; 2,5 и 2 года. Это вызвано быстрым
старением компьютеров, поэтому для различных отраслей промышленности =0,33;
 - капитальные вложения
на проектирование и внедрение АСУ ТП, приобретение КТС, проектирование и
внедрение специальных технических средств и т.д., равны 678071 руб.
- капитальные вложения
на проектирование и внедрение АСУ ТП, приобретение КТС, проектирование и
внедрение специальных технических средств и т.д., равны 678071 руб.

Годовой экономический эффект составляет  руб.
руб.
6.2.12 Капитальные затраты на
разработку и ввод в эксплуатацию АСУТП
Капитальные затраты на разработку и ввод
в действие АСУ ТП рассчитываются по формуле:
 ;(6.10)
;(6.10)
где - стоимость всех работ по
разработке проекта и внедрению АСУ ТП (по договору), равна 250000 руб;
 ,
,  -
см. пояснение к формуле (35);
-
см. пояснение к формуле (35);
 - стоимость разработки
специального (прикладного) математического обеспечения (СМО) для управления
технологическим процессом, равна 60000 руб.;
- стоимость разработки
специального (прикладного) математического обеспечения (СМО) для управления
технологическим процессом, равна 60000 руб.;
 .
.
Капитальные затраты на разработку и ввод
в эксплуатацию АСУ ТП составляют 678071 руб.
Применительно к проекту АТК для дискретных
производств, т.е. требующих больших трудовых ресурсов, срок окупаемости
капитальных вложений рассчитывается по формуле:
 ;(6.11)
;(6.11)
 - годовая экономия,
равна.
- годовая экономия,
равна.
Срок окупаемости капитальных вложений
составляет менее 0,6 года.
6.2.14 Сводная таблица основных параметров
В таблице 6.2 приведены
основные параметры эксплуатационных затрат изменившиеся после внедрения
новойсистемы управления.
Вывод: внедрение автоматизированной системы
управления маслонапорной установкой экономически целесообразным.
Годовой экономический
эффект от внедрения системы составляет 931424
рубля.
Годовая
экономия составляет 1157978
рубля.
Срок окупаемости системы
составляет 0,586 года
Таблица 6.2
|
Статьи затрат
|
Единицы
измерения.
|
Производство
|
Экономия (-)
Увеличение (+)
|
|
до автоматизации
|
после автоматизации
|
|
Заработная плата персонала
|
Рубли
|
290400
|
144000
|
-146400
|
|
Потребление электроэнергии
|
кВч
|
2,2
|
5,3
|
+3,1
|
|
Простой ГЭС
в связи с аварией МНУ
|
Часы
|
40
|
16
|
-24
|
|
Время планового обслуживания
|
Часы
|
60
|
36
|
-24
|
|
Количество персонала задействованного при проведении ТО.
|
Человек
|
4
|
2
|
-2
|
|
Срок служб электродвигателей
насосов
|
Лет
|
15
|
17
|
+2
|
|
Капитальные вложения и др.
|
Рубли
|
-
|
678071
|
+678071
|
|
Годовая экономия
|
Рубли.
|
-
|
1157978
|
+1157978
|
|
Годовой экономический эффект
|
Рубли.
|
-
|
931424
|
+931424
|
|
Срок окупаемости капитальных вложений
|
Лет
|
-
|
0,586
|
+0,586
|
|
Стоимость ремонта
|
Рубли
|
24000
|
17600
|
+6400
|
7. Охрана труда и окружающей
среды
7.1 Факторы повышенной опасности связанные с эксплуатацией
маслонапорных установок
Маслонапорные установки
могут представлять для жизни и здоровья обслуживающего персонала серьезную
опасность.
Конструкция и
предназначение маслонапорной установки обусловили появление следующих опасных
для жизнедеятельности человека факторов:
―
наличие
электроустановок питающихся током высокого напряжения;
―
наличие
движущихся частей;
―
наличие
маслопроводов высокого давления;
―
наличие сосудов
высокого давления.
Эксплуатация
маслонапорных установок должна производится при строгом соблюдении правил
эксплуатации электроустановок, сосудов высокого давления, правил
противопожарной безопасности.
7.2 Правила
техники безопасности при обслуживании сосудов, работающих под давлением
Персонал ГЭС задействованный
при обслуживании и эксплуатации МНУ должен знать и соблюдать приведенные ниже
правила техники безопасности по обслуживанию сосудов высокого давления.
Общие требования
безопасности
К обслуживанию сосудов
могут быть допущены лица не моложе 18 лет, прошедшие медицинское
освидетельствование, обученные по соответствующей программе, аттестованные и
имеющие удостоверение на право обслуживания сосудов, прошедшие вводный и
первичный инструктаж на рабочем месте.
Периодическая проверка
знаний персонала обслуживающего сосуды должна проводиться не реже одного раза в
12 месяцев.
Допуск персонала к
самостоятельному обслуживанию сосудов должен оформляться распоряжением по
подразделению (цеху).
Инструкция по безопасному
обслуживанию сосудов должна находиться на рабочих местах и выдаваться под
расписку обслуживающему персоналу.
В дополнение к данной
инструкции лица обслуживающие сосуды должны руководствоваться и выполнять:
Правила устройства и
безопасной эксплуатации сосудов работающих под давлением.
―
Правила пожарной безопасности.
―
Правила оказания
первой помощи
―
Правила личной
гигиены.
Для обеспечения
безопасных условий эксплуатации сосуды должны быть снабжены приборами для
измерения давления и температуры среды.
―
Предохранительными
устройствами.
―
Запорной арматурой.
Манометры не допускаются
к применению в случаях когда:
―
Просрочен срок
поверки.
―
Стрелка при
отключении не возвращается к нулевому показанию шкалы.
―
Разбито стекло
или имеются повреждения, влияющие на правильность показания.
Поверка манометров с их
опломбированием производится не реже одного раза в 12 месяцев.
Для обеспечения
безопасных условий необходимо постоянно осуществлять контроль за эксплуатацией
и ремонтом сосудов.
Во избежание
возникновения пожара не засорять каналы обтирочным материалом не оставлять на
полу масла и легковоспламеняющие жидкости.
первичные средства
пожаротушения должны находиться в определенном и доступном месте.
Рабочее место и проходы
должны быть освобождены от посторонних предметов.
Производство огневых
работ должно осуществляться при соблюдении противопожарных мероприятий, под
наблюдением ответственного лица, при наличии наряд-допуска на огневые работы.
При получении персоналом
производственной травмы необходимо принять меры по оказанию первой помощи,
сообщить в здравпункт и уведомить руководство цеха о происшедшем.
Нарушения правил
безопасности, и непринятие мер по устранению неисправностей на сосуде влечет за
собой наказание в порядке, установленном «Правилами внутреннего трудового
распорядка предприятий» и ТК РФ.
Каждый работник
обеспечивается спецодеждой и СИЗ согласно утвержденного перечня:
―
костюм х/б Ми,
тип А, Б
―
рукавицы х/б
―
очки защитные
До начала работы по
обслуживанию сосудов высокого давления лица производящие работы обязаны:
Одеть спец. одежду,
проверить исправность рабочего инструмента и средств индивидуальной защиты.
Получить наряд-допуск на
производство работ.
Проверить наличие на
рабочем месте переносных знаков и предупредительных плакатов.
Проверить готовность
рабочего места по наряду-допуску.
До начала производства
работ внутри сосуда, соединенного сдругими работающими сосудами, сосуд должен
быть отделен от них и источника давления заглушками или отсоединен.
Применяемые для
отключения сосуда заглушки должны быть соответствующей прочности.
Перед началом работы на
приводах пусковой и запорной арматуры отключенного сосуда вывесить плакаты «Не
включать, работают люди».
7.3 Правила
техники безопасности применяемые персоналом ГЭС во время выполнении ремонтных
работ с сосудами высокого давления
Cвоевременно устранить выявленные
дефекты.
Внимательно следить за
показанием приборов
Не оставлять сосуд без
надзора до полного снижения давления в нем. один раз в смену проверить
предохранительные клапаны (путем принудительного подрыва) с записью в журнале.
Эксплуатировать сосуд в
соответствии с требованиями правил по сосудам.
Производить своевременный
качественный ремонт и подготовку сосудов для технического освидетельствования.
Запрещается во время
эксплуатации сосуда проведение ремонтных работ внутри сосуда или работ,
связанных с ликвидацией негерметичности соединений отдельных его элементов,
находящихся под давлением.
Запрещается во время
ремонта проводить какие-либо конструктивные изменения сосудов, работающих под
давлением без согласования с Госгортехнадзором, а также без оформления
соответствующей документации.
Сосудам после ремонта и
выполнением электросварочных и др. огневых работ должно быть произведено
техническое освидетельствование, внутренний осмотр и гидравлическое испытание.
При работе внутри сосуда
должны применяться безопасные светильники на напряжение не выше 12 Вольт. Если
при техническом освидетельствовании окажется, что сосуд вследствие имеющихся
дефектов находится в состоянии, опасном для дальнейшей эксплуатации, работа такого
сосуда должна быть запрещена.
При сварке в сосуде
следует устанавливать вытяжную вентиляцию. Рекомендуется применять переносные
нормативные местные отсосы, а также подачу воздуха непосредственно под щиток
сварщика. При отсутствии местных отсосов электросварщики должны применять
средства индивидуальной защиты органов дыхания.
При длительной (более 1
часа) работе в сосуд вентилятором или компрессором должен подаваться воздух. В
течение часа должен обеспечиваться не менее чем 3-х кратным воздухообменом.
Сварочные работы внутри
емкости должны производиться под контролем не менее 2-х наблюдающих, имеющих
квалификационную группу 2 по электробезопасности, которые должны находиться
снаружи свариваемого сосуда. Электросварщик, работающий внутри сосуда, должен
иметь предохранительный пояс, снабженный заплечными ремнями и канатом, конец
которого должен находиться у наблюдающего.
При сварочных работах
внутри сосуда, кроме спецодежды, защищающей от искр и брызг расплавленного
металла, сварщик должен обеспечиваться диэлектрическими перчатками, галошами и
ковриком.
Для защиты головы
электросварщика от механических травм и поражения электрическим током должны
выдаваться защитные каски из токонепроводящих материалов.
Электросварщик должен
обеспечиваться щитками со светофильтром по с покрывным стеклом в соответствии с
действующим стандартом.
7.4 Правила
техники безопасности при обслуживании электрических частей МНУ
Перед началом работ в электроустановках необходимо выполнить
организационные и технические мероприятия согласно "ПТЭ и ПТБ электроустановок
потребителей".
Организационными мероприятиями, обеспечивающими безопасность
работы в электроустановках, являются:
―
оформление работы
нарядом-допуском, распоряжением или перечнем работ;
―
допуск к работе;
―
надзор во время
работы;
―
оформление
перерыва в работе, переводов на другие рабочие места, окончание работы.
Техническими мероприятиями, обеспечивающими безопасность
работ в электроустановках, являются:
―
производство
необходимых отключений и принятие мер препятствующих подаче напряжения к месту
работы вследствие ошибочного или самопроизвольного включения коммутационной
аппаратуры;
―
вывеска
запрещающих плакатов;
―
проверка
отсутствия напряжения;
―
наложение
заземления;
―
вывеска
предупреждающих и предписывающих плакатов.
Все ремонтные работы в
действующих электроустановках цеха должны производиться не менее, чем двумя
лицами с квалификацией одного из них не ниже 3 группы электробезопасности.
Перед каждым
употреблением инструмента с изолирующими ручками и защитных средств,
электромонтер обязан внешним осмотром;
―
проверить
исправность и отсутствие внешних повреждений;
―
по клейму
проверить – в установках каждого напряжения их можно использовать и срок их
испытания.
Запрещается пользоваться
неисправным инструментом и инструментом, срок испытания которого истек.
Дежурный, придя на
дежурство, принимает смену от предыдущего, а по окончании сдает смену
следующему по графику дежурному.
Принимающий смену
знакомится со всеми записями в эксплуатационном журнале, проверяет и принимает
материалы, инструмент, ключи, ведомости, защитные средства, журналы.
Сдающий смену ставит в
известность принимающего о состоянии и режиме работы основного оборудования, об
изменениях в схемах питания и управления. Сообщает об электрооборудовании,
выведенном в ремонт.
Принимающий смену
сообщает вышестоящему начальнику о вступлении на дежурство и о недостатках,
замеченных при приемке смены.
Ремонт и обслуживание
электрооборудования осуществляется одним или несколькими электромонтерами, из
которых распоряжением по цеху выделяется бригадир. Квалификация бригадира
должна быть не ниже 3 группы электробезопасности.
Работа в
электроустановках выполняется согласно наряда-допуска с предварительным
выполнением технических мероприятий согласно "ПТЭ и ПТБ"
электроустановок потребителей.
При выполнении работ
выполнять распоряжения руководящего электротехнического персонала цеха, за
исключением распоряжений, противоречащих правилам безопасности труда рабочих
или исправности оборудования.
Производство отключений и
переключений в электроустановках:
―
включение и
отключение на распределительных силовых и осветительных шкафах производятся
единолично электромонтером, имеющим квалификацию не ниже 3 группы.
―
производство
переключений на высоте более 1,3 от пола с приставных лестниц, подмостков и
т.д. осуществляется не менее чем двумя лицами, с квалификацией одного их них не
ниже 3 группы.
―
Смена сгоревших
предохранителей производится при снятом напряжении. При невозможности снятия
напряжения смену предохранителей допускается производить под напряжением, но
при снятой нагрузке. При этом необходимо применять предохранительные очки,
диэлектрические перчатки, изолирующие клещи.
Смена ламп местного
освещения производится:
―
Смена ламп на
высоте менее 1.3 м производится электромонтером с квалификацией не ниже 2
группы.
―
На высоте более
2,5 м – производится не менее чем двумя лицами с квалификацией не ниже 2 группы
при отключенной осветительной линии в диэлектрических перчатках.
―
Смена ламп на
фермах цеха, производящаяся с крана, выполняется двумя лицами с квалификацией
одного и них не ниже 2 группы, а второго – не ниже 3 группы под руководством
энергетика или мастера. Замена ламп производится только в дневное время при
полностью отключенной осветительной линии, в диэлектрических перчатках. Лицо,
производящее замену ламп, обязательно использует предохранительный пояс.
―
При ремонтах
осветительных установок обязательно проводится проверка правильности
подключения проводов к патрону – нулевой к цоколю, фазный – к пятке патрона.
При возникновении аварийной ситуации необходимо произвести
отключение от питающей линии, прекратить работы и сообщить непосредственному
руководителю.
Передача смены во время ликвидации аварии при неисправности
электрооборудования основных производственных механизмов запрещается и может
быть допущена как исключение с письменного разрешения вышестоящего
руководителя.
Первичные средства для
тушения пожара должны всегда находиться в строго определенном, легко доступном
месте. При возникновении пожара необходимо немедленно сообщить в пожарную
охрану (тел. 01), отключить оборудование, снять напряжение. Если отключить
установку невозможно, перерубить провода с соблюдением мер предосторожности.
По окончании работ
необходимо:
―
привести в
порядок рабочее место
―
убрать материалы,
электроаппаратуру, инструмент в специальные шкафы.
―
Сдать
электромонтеру, принимающему смену, техническую документацию, защитные
средства, сделать запись в оперативном журнале и расписаться в сдаче смены.
―
Вымыть руки и
лицо или принять душ.
7.5 Мероприятия по обеспечению
электробезопасности МНУ
Для предотвращения возникновения искры при разрядах
статического электричества все технологическое оборудование, трубопроводы,
емкости и т.д. заземляются.
Для ограждения токоведущих частей в практике
предусматриваются сетчатые и сплошные ограждения 1,7 м. Применяют следующие
защитные мероприятия от поражения человека электрическим током :
-
Обеспечение
недоступности токоведущих частей электроустановки (шкафы, оградительные
сооружения и т.п.);
-
Защитное
заземление (ГОСТ 12.1.019-79. ССБТ);
-
Зануление (ГОСТ
12.1.030-81. ССБТ);
-
Защитное
отключение (ГОСТ 12.1.030-81. ССБТ);
-
Применение малых
напряжений.
Расчет зануления электрического
оборудования МНУ
Основной мерой защиты персонала
ГЭС от поражения электрическим током при аварии электрооборудования является
зануление – преднамеренное электрическое соединение металлических нетоковедущих
частей электроустановки, которые могут оказаться под напряжением с землей.
Назначение зануления - устранение опасности поражения током в случае
прикосновения к корпусу электроустановки и другим металлическим нетоковедущим
частям, оказавшимся под напряжением относительно земли вследствие замыкания на
корпус и по другим причинам (ГОСТ 12.1.030-35. ССБТ).
Принцип действия
зануления - превращение замыкания на корпус в однофазное короткое замыкание с
целью вызвать ток, способный обеспечить срабатывание защиты и, тем самым,
автоматически отключить поврежденную электроустановку от питающей сети. Кроме
того, поскольку зануленные корпуса заземлены через нулевой защитный проводник,
то в аварийный период проявляется защитное свойство этого заземления - снижение
напряжения корпусов относительно земли. Схема зануления многодвигательной
установки (МНУ) представлена на рис. 7.1.
Для того, чтобы снизить
опасные потенциалы при замыкании на корпус, используются повторные заземлители
с сопротивлением заземлителя не более 10 Ом.
Питание подводится
алюминиевым проводом сечением 25 мм, а роль нулевого проводника выполняет
стальная полоса сечением 50 мм.
Приведем типовой расчет
зануления для электроустановок.
При использовании
зануления оборудования МНУ должны быть выполнены следующие условия:
Iкз = k*Iном , (7.1)
где - коэффициент
кратности номинального тока Iном (А) плавкой вставки предохранителя, k=3.
Номинальным током плавкой
вставки Iном называется ток, значение которого указано непосредственно на
вставке заводом-изготовителем. Номинальный ток Iном в помещении 40 А. Значение
Iкз зависит от фазного напряжения сети и сопротивления цепи, в том числе от
полного сопротивления трансформатора Zт, фазного проводника Zф, нулевого
защитного проводника Zнз, внешнего индуктивного сопротивления петли
"фазный провод - нулевой защитный провод" (петли
"фаза-нуль") Xп, активного сопротивления заземлений нейтрали обмоток
трансформатора Rо и повторного заземления нулевого защитного проводника Rп. Поскольку
Rо и Rп, как правило, велики по сравнению с другими сопротивлениями, ими можно
пренебречь.
Выражение для Iкз будет
иметь вид:
Iкз = Uф/(Zт/3 + Zп), (7.2)
где Zп = Zф + Zнз + Xп
- комплексное полное сопротивление петли "фаза-нуль".
Удельное сопротивление
фазного провода:
p = 0,028 (Ом*мм )/м , Sсеч = 25 мм,
)/м , Sсеч = 25 мм,
отсюда сопротивление
фазного провода :
rф = р * (Lф / Sф) = 0,028 * 300 / 25 = 0,336 Ом.
Удельное сопротивление
нулевого провода:
p = 0,058 (Ом*мм)/м , Sсеч = 50 (мм),
отсюда сопротивление
нулевого провода:
Rнз = p * (L / S) = 0,058 * 300 / 50 = 0,348(Ом).
Значения Xф и Xнз малы,
ими можно пренебречь.
Значение Xп можно
определить по формуле:
Xп = 0,145*lg(dср/k * dф) (7.3)
* dф) (7.3)
где k = 0,3894,
dср - расстояние между
проводниками,
dф - геометрический
диаметр.
Расчеты дают значение Xп
= 0,556 Ом.
Сопротивление
электрической дуги берем равной
rд = 0,02 (Ом), Xд =
0.
В соответствии с
мощностью трансформатора
rт = 0,0044 (Ом), Xт =
0,0127 (Ом)
Полное сопротивление петли
"фаза-нуль":
 (7.4)
(7.4)
Zп = 0,716 (Ом).
При использовании
зануления по требованиям ПУЭ (правила устройства электроустановок):
Rнз/Rф = 0,348/0,336 < 2 , следовательно ПУЭ выполняется.
Iкз = Uф/(Zт/3+Zп) =
220/(0,013+0,716) = 301,6 А.
При попадании фазы на
зануленный корпус электроустановки должно произойти автоматическое отключение.
Iкз > k*Iном
301,6 > 3*40 = 120
Защитное зануление
выполнено правильно, следовательно, отключающая способность системы обеспечена.
Определим напряжение
прикосновения и ток через человека до срабатывания защиты:
Uпр = Iкзh * Rh
 (7.5)
(7.5)
Rпз = 0,348 (Ом), Rнп = 10 (Ом), Rо =
4 (Ом)
Rh = 1 (кОм)
Uпр = 29,9 (В)
Такое напряжение
безопасно для человека при времени воздействия:
tдоп<=50/Ihрасч (7.6)
Iрасч =Uпр/Rh = 29.9/1000=29.9 (мА)
Предельно допустимое
время пребывания человека под действием электрического тока:
tдоп <= 50/29,9 =
1,67 (с)
В качестве прибора
защитного отключения можно выбрать автоматический выключат ель, расчитанный на
Iном = 40 А и tср = 0,3 (с) при Iкз = 301 (А).
Tср = tср* Iном/Iкз = 0,11 (с).
Это должно обеспечить
надежную защиту, при этом должно выполняться:
K = Iкз/Iном >= 1,4
K = 301/40 = 7,5
>> 1,4
7.6 Охрана окружающей среды
Работа маслонапорной
установки ГЭС практически не оказывает влияния ни какого влияния на
экологическую обстановку окружающей территории. Единственны отрицательный
фактор – это проникновение турбинного масла в водоем в небольшом количестве.
Во время работы
сервомоторов привода лопастей поворотно-лопастной турбины может нарушится
качество уплотнительных сальников и масло из гидропривода начинает
просачиваться в водоем. При значительном количестве вытекшего масла, может
ухудшиться экологическая ситуация в водоеме.
Вытекшее масло образует
на поверхности водоема масляную пленку, препятствующую насыщению воды
кислородом, как следствие угнетается фауна водоема. Водные насекомые не могут
проникнуть из воды в воздух и наоборот. Масло скапливается на жабрах рыб,
особенно это опасно для молодняка и при значительной концентрации машинного
масла в водоеме происходит массовая гибель молодняка. масло скапливающееся на
листьях водных растений препятствуют газообмену и ограничивают прохождение
солнечного света.
Накопление химических
элементов входящих в состав присадок масла и примесей (Fe, Al, Mg, Cr и других) приводит при определенных концентрациях к
изменению биохимических процессов у большинства живых организмов. При высоких
концентрациях наблюдается проявление снижение репродуктивной функции, замедлению
метаболизма и может привести к смерти животного.
Для своевременного
обнаружения течи масла в системе МНУ было применено следующее решение. В
сливном баке МНУ устанавливается датчик уровня, контролирующий уровень масла, а
следовательно и его количестве. Гидравлическом приводе системы регулирования
ГЭС количество масла всегда постоянно. Изменяется лишь уровень масла в
гидроаккумуляторе. Однако если контролировать уровень масла в сливном баке МНУ
в момент срабатывания одного из датчиков уровня в ГА можно получить достаточное
точное представление о динамике изменения количества масла в системе.
Следовательно при периодичности опроса примерно раз в минуту, можно
своевременно обнаружить течь.
Система управления МНУ
выдаст предупредительный сигнал при обнаружение течи масла. Оператор примет
решение о необходимости остановки ГЭС, если визуальный осмотр не выявит течь в
маслопроводах и устройствах. расположенных внутри агрегатного помещения. Тем
самым можно своевременно обнаружить протечку и предотвратить загрязнение
водоемов. При выявление больших протечек масла, САУ ГЭС производит
автоматическую остановку турбины и сброс давления в системе регулирования
гидротурбины.
Использование
разработанной системы управление позволяет снизить уровень загрязнения водоема до
незначительного уровня, что улучшает экологическое состояние прилегающих к
гидроэлектростанции.
Заключение
В результате работы над
проектом был проведен анализ маслонапорной установки, как объекта
автоматизации. Создана общая концепция разработки системы автоматизации.
Создана логическая модель, эксперименты с которой позволили подтвердить правоту
выбранных управляющих алгоритмов. Была создана компьютерная модель системы
управления.
На основании анализа
системы и выполненных моделей была разработана система управления МНУ, которая
с может применяться практически на любой маслонапорной установке. Проведен
подбор необходимых для реализации системы аппаратных средств и разработан
алгоритм управляющей программы.
Выполнен экономический
анализ эффективности внедрения системы в ходе которого выяснилось, что
внедрение системы выгодно и обосновано. Данная САУ обладает хорошей
окупаемостью и экономичностью.
Проведен анализ опасных
факторов воздействия на человеческий организм при эксплуатации маслонапорных
установок и разработан комплекс мер по охране труда.
В результате проведения
работы был произведен многосторонний анализ проблем связанных с разработкой
универсальных систем управления МНУ.
Поставленные при
разработке САУ задачи считаю реализованными.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.
Клюев А.С.
Автоматическое регулирование. М.: Высшая школа, 1986;
2.
Абдурахманов
Л.Ф., Ананьин Б.Н. и др. Гидроэнергетическое и вспомогательное оборудование
ГЭС. М.: Энергоиздат., 1988;
3.
Колпаков Н.П.,
Семенов Р.Л. Проектирование систем управления гидроэнергетическими станциями.
М.: Энергоиздат., 1981;
4.
Официальный сайт
фирмы Прософт: http://www.siemens.ru;
6.
Беклешов В.К. Технико-экономическое обоснование дипломных проектов:
Учеб. пособие для втузов. М.: Высш. шк., 1991.
7.
Вальков В.М., Вершин В.Е. Автоматизированные системы управления технологическими
процессами. 3-е изд., перераб. и доп. – Л.: Политехника, 1991.
8.
Шапиро В.Д.
Управление проектами-СПб.; “ДваТрИ”,1996.
9.
Васильев Г.А. Технико-экономические расчёты новой техники. М., «Машиностроение»,
1977.
10.
Волков О.И. Экономика предприятия: Учебник. – 2-е изд., перераб. и доп.
– М.: ИНФРА-М, 2000.
11.
Геворкян А.М., Карасёва А.А. Экономика и организация производства в дипломных
работах по технологическим специальностям: Учеб. пособие. – М.: Высш. шк.,
1982.
12.
Жиделева В.В., Каптейн Н.Н., Экономика предприятия: Учеб. пособие. –
2-изд., перераб. и доп. – М.: ИНФРА-М, 2005.
13.
Зайцев Н.Л. Экономика промышленного предприятия: Учебник. ИНФРА-М, 1998.
14.
Новицкий Н.И. Организация и планирование производства: Практикум. Мн.:
Новое знание, 2004.
15.
Самсонов В.С. Экономика предприятий энергетического комплекса: Учеб. для
вузов. – М.: Высш. шк., 2001.
16.
Сергеев И.В. Экономика предприятия. Учеб. пособие. М.: Финансы и статистика,
2000.
17.
Туровец О.Г., Билинкис В.Д. Вопросы экономики и организации производства
в дипломных проектах: Учеб. пособие для студентов электротехнических и приборостроительных
специальностей вузов. – М.: Высш. шк. 1978.
18.
Фалько С.Г. Экономика предприятия: Учеб. для вузов. – М.: Дрофа, 2003.
19.
Хрипач В.Я., Суша Г.З. Экономика предприятия. – Мн.: Экономпресс. 2000.
20.
Шилов И.А. Экология. – М,:Высшая школа. 2000.